|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
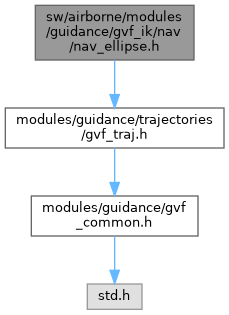
#include "modules/guidance/trajectories/gvf_traj.h" Include dependency graph for nav_ellipse.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_ellipse.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_ik_ell_par |
Functions | |
| bool | nav_gvf_ik_ellipse_wp (uint8_t wp, float a, float b, float alpha) |
| bool | nav_gvf_ik_ellipse_XY (float x, float y, float a, float b, float alpha) |
Variables | |
| gvf_ik_ell_par | gvf_ik_ellipse_par |
| struct gvf_ik_ell_par |
Definition at line 103 of file nav_ellipse.c.
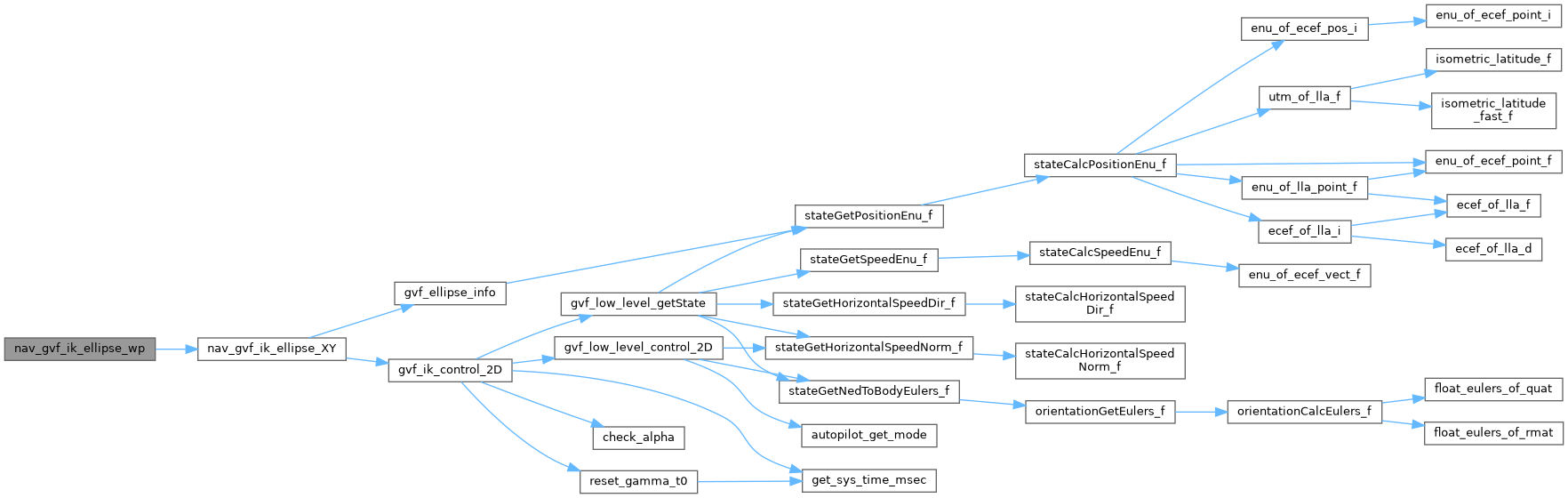
References alpha, b, gvf_p_len_wps, gvf_trajectory, nav_gvf_ik_ellipse_XY(), gvf_tra::p, WaypointX, and WaypointY.
Here is the call graph for this function:Definition at line 64 of file nav_ellipse.c.
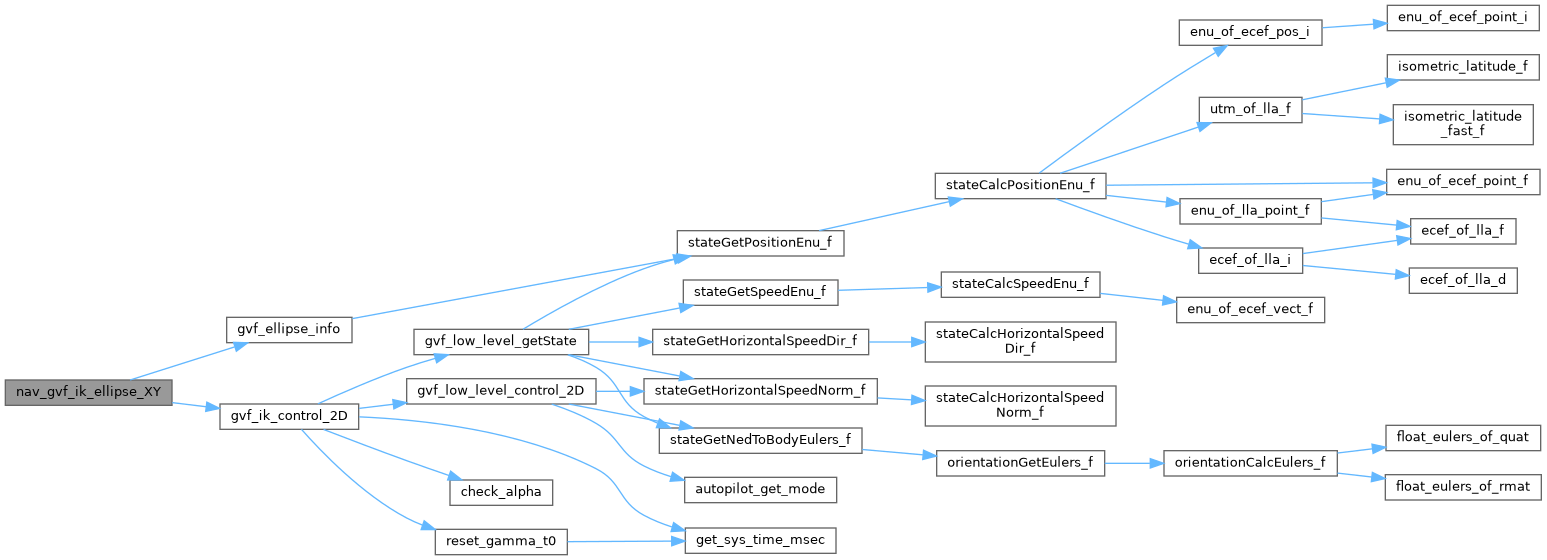
References alpha, b, gvf_ik_con::error, foo, gvf_ellipse_info(), gvf_ik_control, gvf_ik_control_2D(), gvf_ik_ellipse_par, gvf_p_len_wps, gvf_trajectory, gvf_ik_con::ke, gvf_ik_ell_par::ke, gvf_ik_ell_par::kn, gvf_tra::p, gvf_tra::p_len, and gvf_tra::type.
Referenced by nav_gvf_ik_ellipse_wp().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |