|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
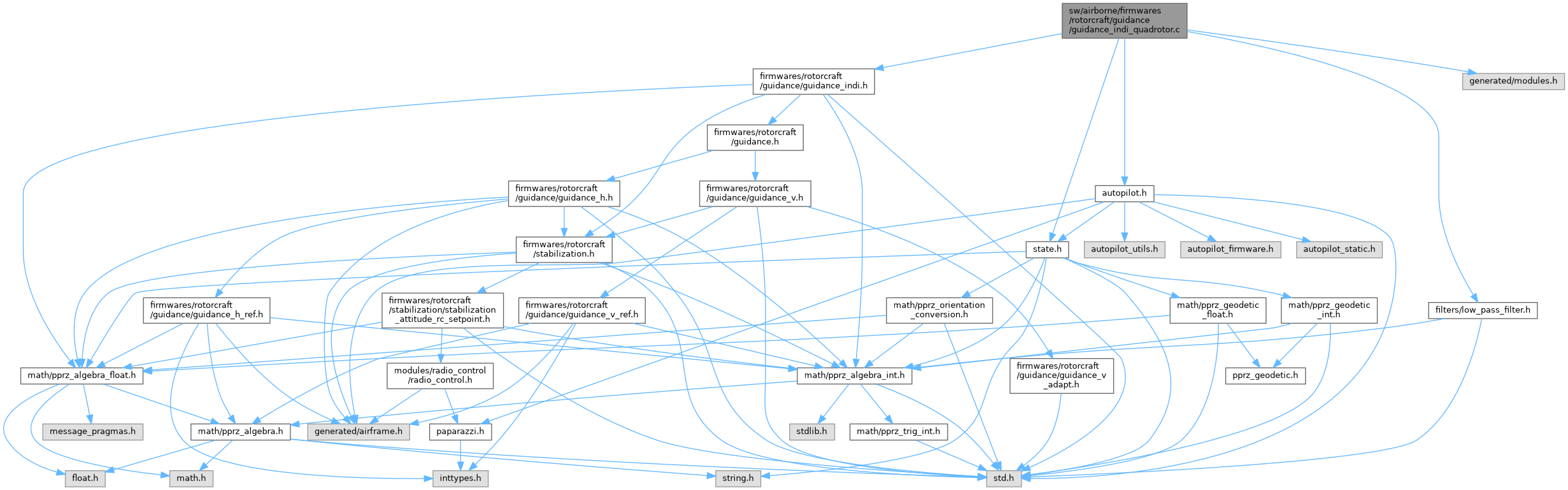
#include "firmwares/rotorcraft/guidance/guidance_indi.h"#include "filters/low_pass_filter.h"#include "state.h"#include "autopilot.h"#include "generated/modules.h" Include dependency graph for guidance_indi_quadrotor.c:
Include dependency graph for guidance_indi_quadrotor.c:Go to the source code of this file.
Functions | |
| static UNUSED void | guidance_indi_calcG_zyx (float Gmat[3][3], struct FloatEulers euler_zyx) |
| static void | guidance_indi_calcG_yxz (float Gmat[3][3], struct FloatEulers euler_yxz) |
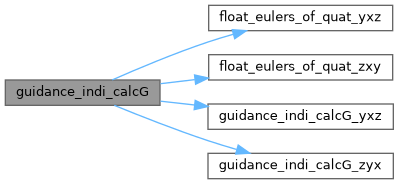
| void | guidance_indi_calcG (float Gmat[3][3], const struct FloatQuat *att) |
| Compute effectiveness matrix for guidance. | |
Compute effectiveness matrix for guidance.
| Gmat | Dynamics matrix |
Definition at line 92 of file guidance_indi_quadrotor.c.
References float_eulers_of_quat_yxz(), float_eulers_of_quat_zxy(), foo, Gmat, guidance_indi_calcG_yxz(), and guidance_indi_calcG_zyx().
Here is the call graph for this function:
|
static |
| Gmat | array to write the matrix to [3x3] |
Calculate the matrix of partial derivatives of the pitch, roll and thrust. w.r.t. the NED accelerations for YXZ eulers ddx = G*[dtheta,dphi,dT]
Definition at line 68 of file guidance_indi_quadrotor.c.
Referenced by guidance_indi_calcG().
Here is the caller graph for this function:
|
static |
| Gmat | array to write the matrix to [3x3] |
Calculate the matrix of partial derivatives of the roll, pitch and thrust. w.r.t. the NED accelerations for ZYX eulers ddx = G*[dtheta,dphi,dT]
Definition at line 39 of file guidance_indi_quadrotor.c.
Referenced by guidance_indi_calcG().
Here is the caller graph for this function: