|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
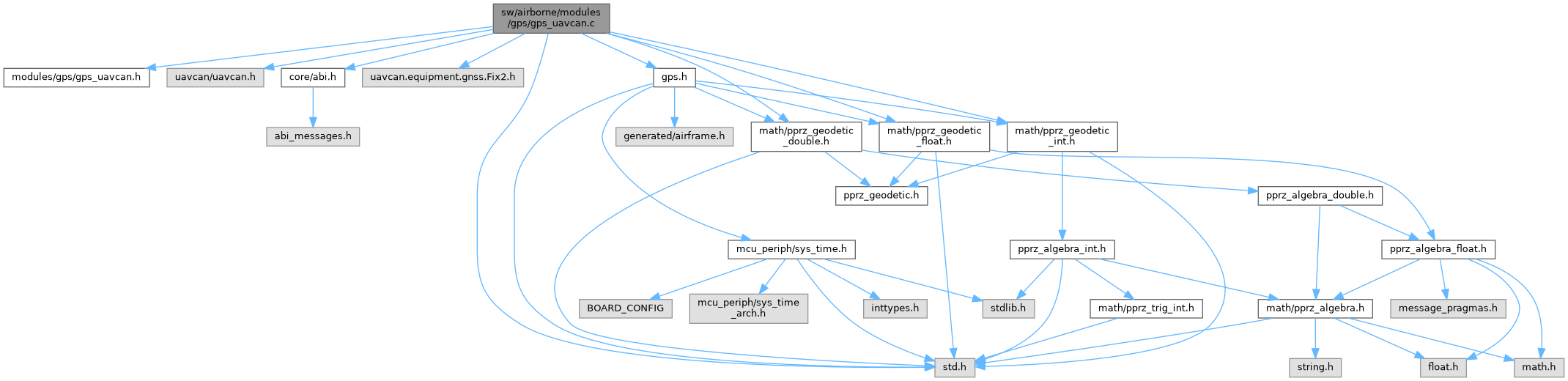
#include "modules/gps/gps_uavcan.h"#include "uavcan/uavcan.h"#include "core/abi.h"#include "uavcan.equipment.gnss.Fix2.h"#include "gps.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_geodetic_double.h"#include "std.h" Include dependency graph for gps_uavcan.c:
Include dependency graph for gps_uavcan.c:Go to the source code of this file.
Macros | |
| #define | SECS_IN_WEEK (7*24*3600000) |
Functions | |
| static void | gps_uavcan_cb (struct uavcan_iface_t *iface, CanardRxTransfer *transfer) |
| void | gps_uavcan_init (void) |
Variables | |
| static uavcan_event | gps_uavcan_ev |
Definition in file gps_uavcan.c.
| #define SECS_IN_WEEK (7*24*3600000) |
Definition at line 39 of file gps_uavcan.c.
|
static |
Definition at line 43 of file gps_uavcan.c.
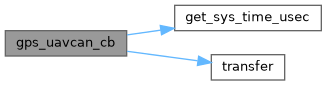
References course, foo, get_sys_time_usec(), GPS_FIX_2D, GPS_FIX_3D, GPS_FIX_DGPS, GPS_FIX_NONE, GPS_FIX_RTK, GPS_UAVCAN_ID, GPS_VALID_COURSE_BIT, GPS_VALID_HMSL_BIT, GPS_VALID_POS_ECEF_BIT, GPS_VALID_POS_LLA_BIT, GPS_VALID_VEL_ECEF_BIT, GPS_VALID_VEL_NED_BIT, msg, sys_time::nb_sec, sys_time::nb_sec_rem, NormCourseRad, SECS_IN_WEEK, SQUARE, state, transfer(), VECT2_NORM2, and VECT3_NORM2.
Referenced by gps_uavcan_init().
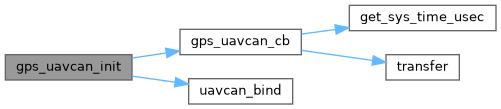
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 205 of file gps_uavcan.c.
References foo, gps_uavcan_cb(), gps_uavcan_ev, and uavcan_bind().
Here is the call graph for this function:
|
static |
Definition at line 41 of file gps_uavcan.c.
Referenced by gps_uavcan_init().