|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
AHRS using Madgwick implementation. More...
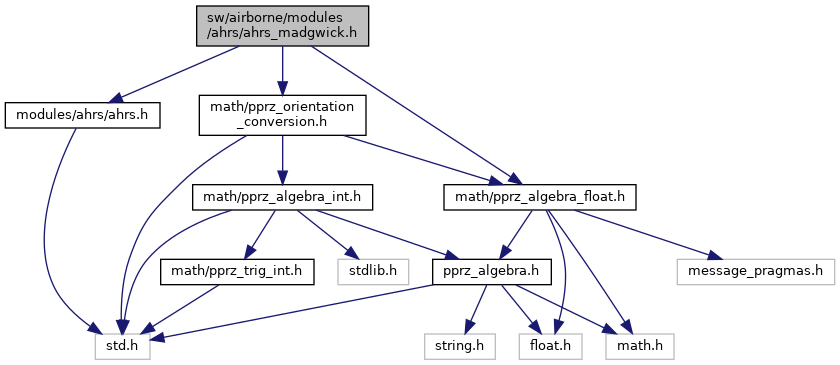
#include "modules/ahrs/ahrs.h"#include "math/pprz_algebra_float.h"#include "math/pprz_orientation_conversion.h" Include dependency graph for ahrs_madgwick.h: This graph shows which files directly or indirectly include this file:
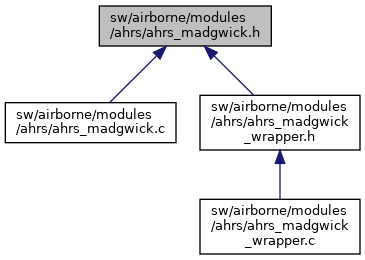
Include dependency graph for ahrs_madgwick.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | AhrsMadgwick |
| Madgwick filter structure. More... | |
Functions | |
| void | ahrs_madgwick_init (void) |
| void | ahrs_madgwick_align (struct FloatRates *lp_gyro, struct FloatVect3 *lp_accel) |
| void | ahrs_madgwick_propagate (struct FloatRates *gyro, float dt) |
| void | ahrs_madgwick_update_accel (struct FloatVect3 *accel) |
Variables | |
| struct AhrsMadgwick | ahrs_madgwick |
AHRS using Madgwick implementation.
See: https://x-io.co.uk/open-source-imu-and-ahrs-algorithms/
Definition in file ahrs_madgwick.h.
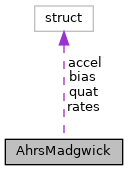
| struct AhrsMadgwick |
Madgwick filter structure.
Definition at line 38 of file ahrs_madgwick.h.
Collaboration diagram for AhrsMadgwick:| Data Fields | ||
|---|---|---|
| struct FloatVect3 | accel | Measured accelerometers. |
| struct FloatRates | bias | Gyro bias (from alignment) |
| bool | is_aligned | aligned flag |
| struct FloatQuat | quat | Estimated attitude (quaternion) |
| struct FloatRates | rates | Measured gyro rates. |
| bool | reset | flag to request reset/reinit the filter |
|
extern |
Definition at line 59 of file ahrs_madgwick.c.
References ahrs_float_get_quat_from_accel(), ahrs_madgwick, AhrsMadgwick::bias, AhrsMadgwick::is_aligned, and AhrsMadgwick::quat.
Referenced by aligner_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 50 of file ahrs_madgwick.c.
References ahrs_madgwick, init_state(), AhrsMadgwick::is_aligned, and AhrsMadgwick::reset.
Referenced by ahrs_madgwick_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 69 of file ahrs_madgwick.c.
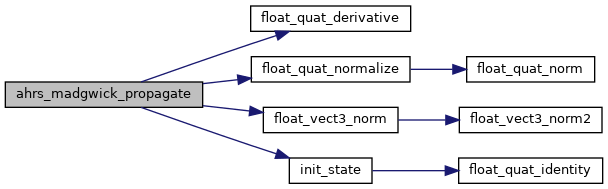
References AhrsMadgwick::accel, ahrs_madgwick, AHRS_MADGWICK_BETA, AhrsMadgwick::bias, float_quat_derivative(), float_quat_normalize(), float_vect3_norm(), foo, init_state(), AhrsMadgwick::is_aligned, FloatQuat::qi, AhrsMadgwick::quat, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, AhrsMadgwick::rates, RATES_DIFF, AhrsMadgwick::reset, VECT3_SDIV, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 139 of file ahrs_madgwick.c.
References AhrsMadgwick::accel, and ahrs_madgwick.
Referenced by accel_cb().
Here is the caller graph for this function:
|
extern |
Definition at line 39 of file ahrs_madgwick.c.
Referenced by accel_cb(), ahrs_madgwick_align(), ahrs_madgwick_init(), ahrs_madgwick_propagate(), ahrs_madgwick_update_accel(), aligner_cb(), compute_body_orientation_and_rates(), gyro_cb(), init_state(), send_att(), and send_filter_status().