|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
passthrough attitude stabilization More...
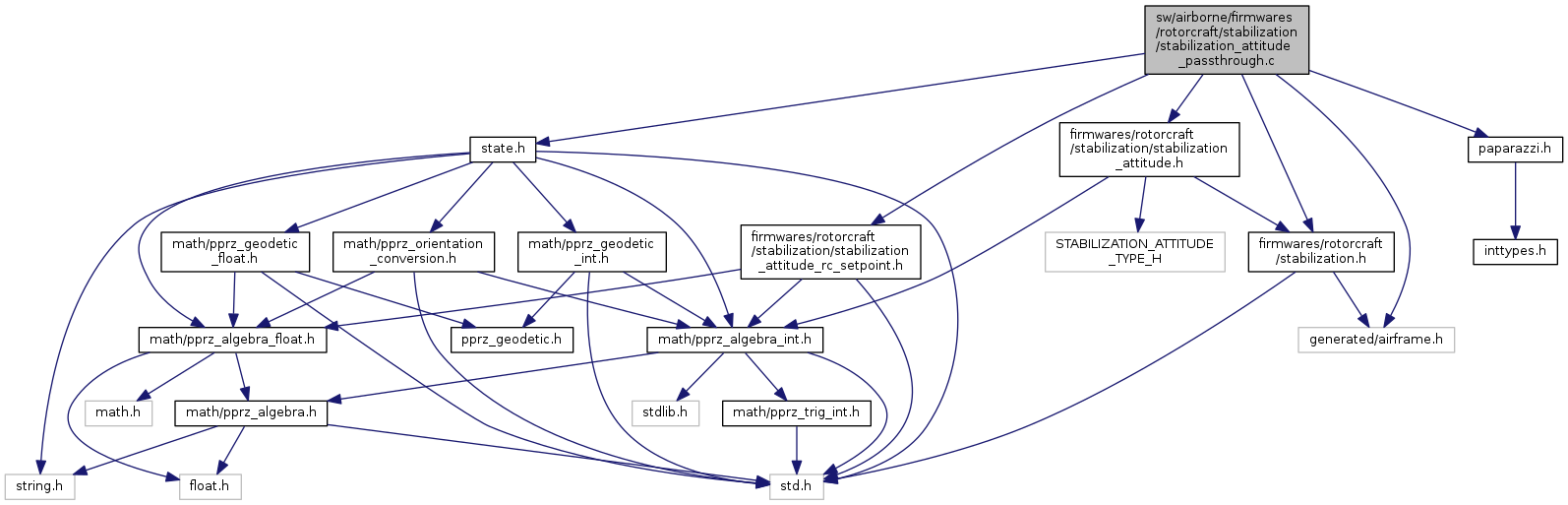
#include "state.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "paparazzi.h"#include "generated/airframe.h" Include dependency graph for stabilization_attitude_passthrough.c:
Include dependency graph for stabilization_attitude_passthrough.c:Go to the source code of this file.
Macros | |
| #define | TRAJ_MAX_BANK (int32_t)ANGLE_BFP_OF_REAL(GUIDANCE_H_MAX_BANK) |
Functions | |
| void | stabilization_attitude_init (void) |
| void | stabilization_attitude_read_rc (bool_t in_flight, bool_t in_carefree, bool_t coordinated_turn) |
| void | stabilization_attitude_enter (void) |
| void | stabilization_attitude_run (bool_t in_flight) |
| void | stabilization_attitude_set_failsafe_setpoint (void) |
| void | stabilization_attitude_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_attitude_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
Variables | |
| struct Int32Eulers | stab_att_sp_euler |
| with INT32_ANGLE_FRAC More... | |
passthrough attitude stabilization
This is useful for instance when having an AC that has needs no stabilization because it is already been done by other stabilization software onboard or just does not need it at all.
Definition in file stabilization_attitude_passthrough.c.
| #define TRAJ_MAX_BANK (int32_t)ANGLE_BFP_OF_REAL(GUIDANCE_H_MAX_BANK) |
Definition at line 39 of file stabilization_attitude_passthrough.c.
Referenced by stabilization_attitude_run().
| void stabilization_attitude_enter | ( | void | ) |
Definition at line 55 of file stabilization_attitude_passthrough.c.
| void stabilization_attitude_init | ( | void | ) |
Definition at line 44 of file stabilization_attitude_passthrough.c.
References INT_EULERS_ZERO, and stab_att_sp_euler.
| void stabilization_attitude_read_rc | ( | bool_t | in_flight, |
| bool_t | in_carefree, | ||
| bool_t | coordinated_turn | ||
| ) |
Definition at line 49 of file stabilization_attitude_passthrough.c.
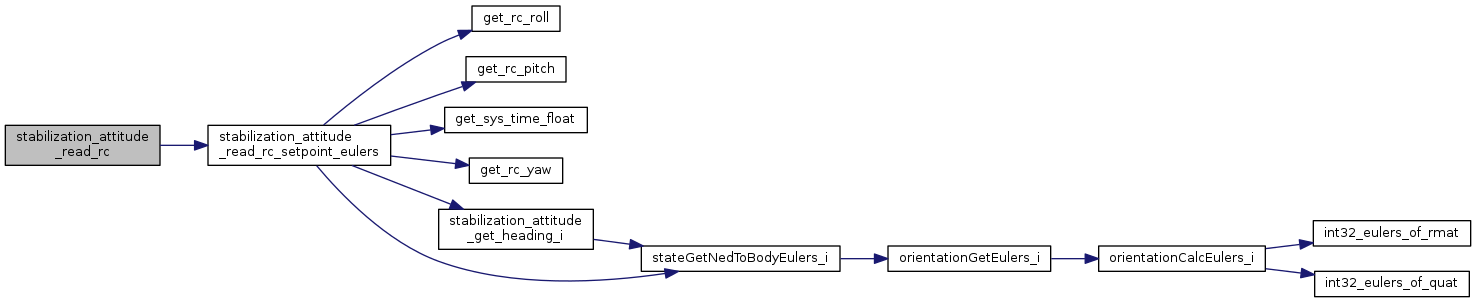
References stab_att_sp_euler, and stabilization_attitude_read_rc_setpoint_eulers().
Here is the call graph for this function:| void stabilization_attitude_run | ( | bool_t | in_flight | ) |
Definition at line 60 of file stabilization_attitude_passthrough.c.
References INT32_ANGLE_NORMALIZE, MAX_PPRZ, Int32Eulers::phi, Int32Eulers::psi, stab_att_sp_euler, stabilization_cmd, stateGetNedToBodyEulers_i(), Int32Eulers::theta, and TRAJ_MAX_BANK.
Here is the call graph for this function:| void stabilization_attitude_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
Definition at line 91 of file stabilization_attitude_passthrough.c.
References heading, INT32_TRIG_FRAC, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, stab_att_sp_euler, stateGetNedToBodyEulers_i(), Int32Eulers::theta, Int32Vect2::x, and Int32Vect2::y.
Here is the call graph for this function:| void stabilization_attitude_set_failsafe_setpoint | ( | void | ) |
Definition at line 79 of file stabilization_attitude_passthrough.c.
References Int32Eulers::phi, Int32Eulers::psi, stab_att_sp_euler, stateGetNedToBodyEulers_i(), and Int32Eulers::theta.
Here is the call graph for this function:| void stabilization_attitude_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Definition at line 86 of file stabilization_attitude_passthrough.c.
References stab_att_sp_euler.
| struct Int32Eulers stab_att_sp_euler |
with INT32_ANGLE_FRAC
Definition at line 41 of file stabilization_attitude_passthrough.c.
Referenced by stabilization_attitude_init(), stabilization_attitude_read_rc(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), and stabilization_attitude_set_rpy_setpoint_i().
 1.8.8
1.8.8