|
| #define | INT32_POS_FRAC 8 |
| |
| #define | INT32_POS_OF_CM 2.56 |
| |
| #define | INT32_POS_OF_CM_NUM 64 |
| |
| #define | INT32_POS_OF_CM_DEN 25 |
| |
| #define | INT32_SPEED_FRAC 19 |
| |
| #define | INT32_SPEED_OF_CM_S 5242.88 |
| |
| #define | INT32_SPEED_OF_CM_S_NUM 41943 |
| |
| #define | INT32_SPEED_OF_CM_S_DEN 8 |
| |
| #define | INT32_ACCEL_FRAC 10 |
| |
| #define | INT32_MAG_FRAC 11 |
| |
| #define | INT32_PERCENTAGE_FRAC 10 |
| |
| #define | INT32_QUAT_FRAC 15 |
| |
| #define | INT32_ANGLE_FRAC 12 |
| |
| #define | INT32_RATE_FRAC 12 |
| |
| #define | INT32_ANGLE_PI_4 (int32_t)ANGLE_BFP_OF_REAL( 0.7853981633974483096156608458198757) |
| |
| #define | INT32_ANGLE_PI_2 (int32_t)ANGLE_BFP_OF_REAL( 1.5707963267948966192313216916397514) |
| |
| #define | INT32_ANGLE_PI (int32_t)ANGLE_BFP_OF_REAL( 3.1415926535897932384626433832795029) |
| |
| #define | INT32_ANGLE_2_PI (int32_t)ANGLE_BFP_OF_REAL(2.*3.1415926535897932384626433832795029) |
| |
| #define | INT32_RAD_OF_DEG(_deg) (int32_t)(((int64_t)(_deg) * 14964008)/857374503) |
| |
| #define | INT32_DEG_OF_RAD(_rad) (int32_t)(((int64_t)(_rad) * 857374503)/14964008) |
| |
| #define | INT32_ANGLE_NORMALIZE(_a) |
| |
| #define | INT32_COURSE_NORMALIZE(_a) |
| |
| #define | INT32_TRIG_FRAC 14 |
| |
| #define | BFP_OF_REAL(_vr, _frac) ((_vr)*(1<<(_frac))) |
| |
| #define | FLOAT_OF_BFP(_vbfp, _frac) ((float)(_vbfp)/(1<<(_frac))) |
| |
| #define | DOUBLE_OF_BFP(_vbfp, _frac) ((double)(_vbfp)/(1<<(_frac))) |
| |
| #define | RATE_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_RATE_FRAC) |
| |
| #define | RATE_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_RATE_FRAC) |
| |
| #define | ANGLE_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_ANGLE_FRAC) |
| |
| #define | ANGLE_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_ANGLE_FRAC) |
| |
| #define | QUAT1_BFP_OF_REAL(_qf) BFP_OF_REAL((_qf), INT32_QUAT_FRAC) |
| |
| #define | QUAT1_FLOAT_OF_BFP(_qi) FLOAT_OF_BFP((_qi), INT32_QUAT_FRAC) |
| |
| #define | TRIG_BFP_OF_REAL(_tf) BFP_OF_REAL((_tf), INT32_TRIG_FRAC) |
| |
| #define | TRIG_FLOAT_OF_BFP(_ti) FLOAT_OF_BFP((_ti),INT32_TRIG_FRAC) |
| |
| #define | POS_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_POS_FRAC) |
| |
| #define | POS_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_POS_FRAC) |
| |
| #define | SPEED_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_SPEED_FRAC) |
| |
| #define | SPEED_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_SPEED_FRAC) |
| |
| #define | ACCEL_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_ACCEL_FRAC) |
| |
| #define | ACCEL_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_ACCEL_FRAC) |
| |
| #define | MAG_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_MAG_FRAC) |
| |
| #define | MAG_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_MAG_FRAC) |
| |
| #define | INT_MULT_RSHIFT(_a, _b, _r) (((_a)*(_b))>>(_r)) |
| |
| #define | INT32_SQRT(_out, _in) { _out = int32_sqrt(_in); } |
| |
| #define | INT_VECT2_ZERO(_v) VECT2_ASSIGN(_v, 0, 0) |
| |
| #define | INT32_VECT2_NORM(_v) int32_sqrt(VECT2_NORM2(_v)) |
| |
| #define | INT32_VECT2_NORMALIZE(_v, _frac) int32_vect2_normalize(&(_v), _frac) |
| |
| #define | INT32_VECT2_RSHIFT(_o, _i, _r) |
| |
| #define | INT32_VECT2_LSHIFT(_o, _i, _l) |
| |
| #define | INT32_VECT2_SCALE_2(_a, _b, _num, _den) |
| |
| #define | INT_VECT3_ZERO(_v) VECT3_ASSIGN(_v, 0, 0, 0) |
| |
| #define | INT32_VECT3_ZERO(_v) VECT3_ASSIGN(_v, 0, 0, 0) |
| |
| #define | INT32_VECT3_SCALE_2(_a, _b, _num, _den) |
| |
| #define | INT32_VECT3_NORM(_v) int32_sqrt(VECT3_NORM2(_v)) |
| |
| #define | INT32_VECT3_RSHIFT(_o, _i, _r) |
| |
| #define | INT32_VECT3_LSHIFT(_o, _i, _l) |
| |
| #define | INT32_MAT33_ZERO(_m) |
| |
| #define | INT32_MAT33_DIAG(_m, _d00, _d11, _d22) |
| |
| #define | int32_rmat_of_eulers int32_rmat_of_eulers_321 |
| | Rotation matrix from Euler angles. More...
|
| |
| #define | INT32_RMAT_COMP(_m_a2c, _m_a2b, _m_b2c) int32_rmat_comp(&(_m_a2c), &(_m_a2b), &(_m_b2c)) |
| |
| #define | INT32_RMAT_COMP_INV(_m_a2b, _m_a2c, _m_b2c) int32_rmat_comp_inv(&(_m_a2b), &(_m_a2c), &(_m_b2c)) |
| |
| #define | INT32_RMAT_VMULT(_vb, _m_a2b, _va) int32_rmat_vmult(&(_vb), &(_m_a2b), &(_va)) |
| |
| #define | INT32_RMAT_TRANSP_VMULT(_vb, _m_b2a, _va) int32_rmat_transp_vmult(&(_vb), &(_m_b2a), &(_va)) |
| |
| #define | INT32_RMAT_RATEMULT(_rb, _m_a2b, _ra) int32_rmat_ratemult(&(_rb), &(_m_a2b), &(_ra)) |
| |
| #define | INT32_RMAT_TRANSP_RATEMULT(_rb, _m_b2a, _ra) int32_rmat_ratemult(&(_rb), &(_m_b2a), &(_ra)) |
| |
| #define | INT32_RMAT_OF_QUAT(_rm, _q) int32_rmat_of_quat(&(_rm), &(_q)) |
| |
| #define | INT32_RMAT_OF_EULERS(_rm, _e) int32_rmat_of_eulers_321(&(_rm), &(_e)) |
| |
| #define | INT32_RMAT_OF_EULERS_321(_rm, _e) int32_rmat_of_eulers_321(&(_rm), &(_e)) |
| |
| #define | INT32_RMAT_OF_EULERS_312(_rm, _e) int32_rmat_of_eulers_312(&(_rm), &(_e)) |
| |
| #define | INT32_QUAT_ZERO(_q) int32_quat_identity(&(_q)) |
| |
| #define | INT32_QUAT_NORM(n, q) { n = int32_quat_norm(&(q)); } |
| |
| #define | INT32_QUAT_WRAP_SHORTEST(q) int32_quat_wrap_shortest(&(q)) |
| |
| #define | INT32_QUAT_NORMALIZE(q) int32_quat_normalize(&(q)) |
| |
| #define | INT32_QUAT_COMP(_a2c, _a2b, _b2c) int32_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
| |
| #define | INT32_QUAT_COMP_INV(_a2b, _a2c, _b2c) int32_quat_comp_inv(&(_a2b), &(_a2c), &(_b2c)) |
| |
| #define | INT32_QUAT_INV_COMP(_b2c, _a2b, _a2c) int32_quat_inv_comp(&(_b2c), &(_a2b), &(_a2c)) |
| |
| #define | INT32_QUAT_COMP_NORM_SHORTEST(_a2c, _a2b, _b2c) int32_quat_comp_norm_shortest(&(_a2c), &(_a2b), &(_b2c)) |
| |
| #define | INT32_QUAT_INV_COMP_NORM_SHORTEST(_b2c, _a2b, _a2c) int32_quat_inv_comp_norm_shortest(&(_b2c), &(_a2b), &(_a2c)) |
| |
| #define | INT32_QUAT_DERIVATIVE(_qd, _r, _q) int32_quat_derivative(&(_qd), &(_r), &(_q)) |
| |
| #define | INT32_QUAT_INTEGRATE_FI(_q, _hr, _omega, _f) int32_quat_integrate_fi(&(_q), &(_hr), &(_omega), _f) |
| |
| #define | INT32_QUAT_VMULT(v_out, q, v_in) int32_quat_vmult(&(v_out), &(q), &(v_in)) |
| |
| #define | INT32_QUAT_OF_EULERS(_q, _e) int32_quat_of_eulers(&(_q), &(_e)) |
| |
| #define | INT32_QUAT_OF_AXIS_ANGLE(_q, _uv, _an) int32_quat_of_axis_angle(&(_q), &(_uv), _an) |
| |
| #define | INT32_QUAT_OF_RMAT(_q, _r) int32_quat_of_rmat(&(_q), &(_r)) |
| |
| #define | INT_EULERS_ZERO(_e) EULERS_ASSIGN(_e, 0, 0, 0) |
| |
| #define | INT32_EULERS_OF_RMAT(_e, _rm) int32_eulers_of_rmat(&(_e), &(_rm)) |
| |
| #define | INT32_EULERS_OF_QUAT(_e, _q) int32_eulers_of_quat(&(_e), &(_q)) |
| |
| #define | INT32_EULERS_LSHIFT(_o, _i, _r) |
| |
| #define | INT32_EULERS_RSHIFT(_o, _i, _r) |
| |
| #define | INT_RATES_ZERO(_e) RATES_ASSIGN(_e, 0, 0, 0) |
| |
| #define | INT_RATES_RSHIFT(_o, _i, _r) |
| |
| #define | INT_RATES_LSHIFT(_o, _i, _r) |
| |
| #define | int32_eulers_dot_of_rates int32_eulers_dot_321_of_rates |
| |
| #define | INT32_RATES_OF_EULERS_DOT_321(_r, _e, _ed) int32_rates_of_eulers_dot_321(&(_r), &(_e), &(_ed)) |
| |
| #define | INT32_RATES_OF_EULERS_DOT(_r, _e, _ed) int32_rates_of_eulers_dot_321(&(_r), &(_e), &(_ed)) |
| |
| #define | INT32_EULERS_DOT_321_OF_RATES(_ed, _e, _r) int32_eulers_dot_321_of_rates(&(_ed), &(_e), &(_r)) |
| |
| #define | INT32_EULERS_DOT_OF_RATES(_ed, _e, _r) int32_eulers_dot_321_of_rates(&(_ed), &(_e), &(_r)) |
| |
|
| uint32_t | int32_sqrt (uint32_t in) |
| |
| static uint32_t | int32_vect2_norm2 (struct Int32Vect2 *v) |
| | return squared norm of 2D vector More...
|
| |
| static uint32_t | int32_vect2_norm (struct Int32Vect2 *v) |
| | return norm of 2D vector More...
|
| |
| static void | int32_vect2_normalize (struct Int32Vect2 *v, uint8_t frac) |
| | normalize 2D vector inplace More...
|
| |
| static void | int32_rmat_identity (struct Int32RMat *rm) |
| | initialises a rotation matrix to identity More...
|
| |
| void | int32_rmat_comp (struct Int32RMat *m_a2c, struct Int32RMat *m_a2b, struct Int32RMat *m_b2c) |
| | Composition (multiplication) of two rotation matrices. More...
|
| |
| void | int32_rmat_comp_inv (struct Int32RMat *m_a2b, struct Int32RMat *m_a2c, struct Int32RMat *m_b2c) |
| | Composition (multiplication) of two rotation matrices. More...
|
| |
| void | int32_rmat_vmult (struct Int32Vect3 *vb, struct Int32RMat *m_a2b, struct Int32Vect3 *va) |
| | rotate 3D vector by rotation matrix. More...
|
| |
| void | int32_rmat_transp_vmult (struct Int32Vect3 *vb, struct Int32RMat *m_b2a, struct Int32Vect3 *va) |
| | rotate 3D vector by transposed rotation matrix. More...
|
| |
| void | int32_rmat_ratemult (struct Int32Rates *rb, struct Int32RMat *m_a2b, struct Int32Rates *ra) |
| | rotate anglular rates by rotation matrix. More...
|
| |
| void | int32_rmat_transp_ratemult (struct Int32Rates *rb, struct Int32RMat *m_b2a, struct Int32Rates *ra) |
| | rotate anglular rates by transposed rotation matrix. More...
|
| |
| void | int32_rmat_of_quat (struct Int32RMat *rm, struct Int32Quat *q) |
| | Convert unit quaternion to rotation matrix. More...
|
| |
| void | int32_rmat_of_eulers_321 (struct Int32RMat *rm, struct Int32Eulers *e) |
| | Rotation matrix from 321 Euler angles (int). More...
|
| |
| void | int32_rmat_of_eulers_312 (struct Int32RMat *rm, struct Int32Eulers *e) |
| | Rotation matrix from 312 Euler angles. More...
|
| |
| static void | int32_quat_identity (struct Int32Quat *q) |
| | initialises a quaternion to identity More...
|
| |
| static uint32_t | int32_quat_norm (struct Int32Quat *q) |
| | Norm of a quaternion. More...
|
| |
| static void | int32_quat_wrap_shortest (struct Int32Quat *q) |
| |
| static void | int32_quat_normalize (struct Int32Quat *q) |
| | normalize a quaternion inplace More...
|
| |
| void | int32_quat_comp (struct Int32Quat *a2c, struct Int32Quat *a2b, struct Int32Quat *b2c) |
| | Composition (multiplication) of two quaternions. More...
|
| |
| void | int32_quat_comp_inv (struct Int32Quat *a2b, struct Int32Quat *a2c, struct Int32Quat *b2c) |
| | Composition (multiplication) of two quaternions. More...
|
| |
| void | int32_quat_inv_comp (struct Int32Quat *b2c, struct Int32Quat *a2b, struct Int32Quat *a2c) |
| | Composition (multiplication) of two quaternions. More...
|
| |
| void | int32_quat_comp_norm_shortest (struct Int32Quat *a2c, struct Int32Quat *a2b, struct Int32Quat *b2c) |
| | Composition (multiplication) of two quaternions with normalization. More...
|
| |
| void | int32_quat_comp_inv_norm_shortest (struct Int32Quat *a2b, struct Int32Quat *a2c, struct Int32Quat *b2c) |
| | Composition (multiplication) of two quaternions with normalization. More...
|
| |
| void | int32_quat_inv_comp_norm_shortest (struct Int32Quat *b2c, struct Int32Quat *a2b, struct Int32Quat *a2c) |
| | Composition (multiplication) of two quaternions with normalization. More...
|
| |
| void | int32_quat_derivative (struct Int32Quat *qd, const struct Int32Rates *r, struct Int32Quat *q) |
| | Quaternion derivative from rotational velocity. More...
|
| |
| void | int32_quat_integrate_fi (struct Int32Quat *q, struct Int64Quat *hr, struct Int32Rates *omega, int freq) |
| | in place quaternion first order integration with constant rotational velocity. More...
|
| |
| void | int32_quat_vmult (struct Int32Vect3 *v_out, struct Int32Quat *q, struct Int32Vect3 *v_in) |
| | rotate 3D vector by quaternion. More...
|
| |
| void | int32_quat_of_eulers (struct Int32Quat *q, struct Int32Eulers *e) |
| | Quaternion from Euler angles. More...
|
| |
| void | int32_quat_of_axis_angle (struct Int32Quat *q, struct Int32Vect3 *uv, int32_t angle) |
| | Quaternion from unit vector and angle. More...
|
| |
| void | int32_quat_of_rmat (struct Int32Quat *q, struct Int32RMat *r) |
| | Quaternion from rotation matrix. More...
|
| |
| void | int32_eulers_of_rmat (struct Int32Eulers *e, struct Int32RMat *rm) |
| |
| void | int32_eulers_of_quat (struct Int32Eulers *e, struct Int32Quat *q) |
| |
| void | int32_rates_of_eulers_dot_321 (struct Int32Rates *r, struct Int32Eulers *e, struct Int32Eulers *ed) |
| |
| void | int32_eulers_dot_321_of_rates (struct Int32Eulers *ed, struct Int32Eulers *e, struct Int32Rates *r) |
| |
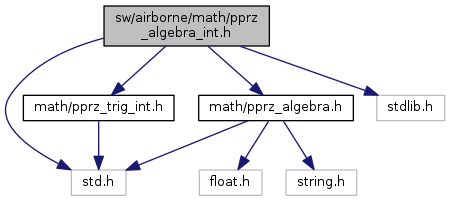
Paparazzi fixed point algebra.
Definition in file pprz_algebra_int.h.
 Include dependency graph for pprz_algebra_int.h:
Include dependency graph for pprz_algebra_int.h: 1.8.8
1.8.8