|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
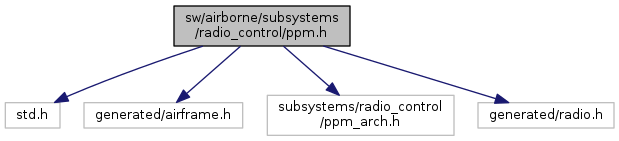
#include "std.h"#include "generated/airframe.h"#include "subsystems/radio_control/ppm_arch.h"#include "generated/radio.h" Include dependency graph for ppm.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ppm.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | RADIO_CONTROL_NB_CHANNEL RADIO_CTL_NB |
| Generated code holding the description of a given transmitter. More... | |
| #define | PPM_PULSE_TYPE_POSITIVE 0 |
| ppm pulse type : futaba is falling edge clocked whereas JR is rising edge More... | |
| #define | PPM_PULSE_TYPE_NEGATIVE 1 |
| #define | RadioControlEvent(_received_frame_handler) radio_control_impl_event(_received_frame_handler) |
Functions | |
| void | ppm_arch_init (void) |
| Architecture dependant code. More... | |
| void | radio_control_impl_event (void(*_received_frame_handler)(void)) |
| RC event function with handler callback. More... | |
| void | ppm_decode_frame (uint32_t ppm_time) |
| Decode a PPM frame. More... | |
Variables | |
| uint16_t | ppm_pulses [RADIO_CTL_NB] |
| volatile bool_t | ppm_frame_available |
| #define PPM_PULSE_TYPE_POSITIVE 0 |
| #define RADIO_CONTROL_NB_CHANNEL RADIO_CTL_NB |
| #define RadioControlEvent | ( | _received_frame_handler | ) | radio_control_impl_event(_received_frame_handler) |
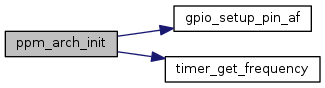
| void ppm_arch_init | ( | void | ) |
Architecture dependant code.
Definition at line 32 of file ppm_arch.c.
References FALSE, gpio_setup_pin_af(), ONE_MHZ_CLK, PPM_CC_IE, PPM_CCR_CRF, PPM_CCR_CRI, PPM_CCR_CRR, PPM_CHANNEL, PPM_GPIO_AF, PPM_GPIO_PIN, PPM_GPIO_PORT, PPM_IRQ, PPM_IRQ2, PPM_IRQ_PRIO, PPM_PINSEL, PPM_PINSEL_BIT, PPM_PINSEL_VAL, PPM_TIMER_INPUT, RC_PPM_TICKS_PER_USEC, T0CCR, timer_get_frequency(), and timer_rollover_cnt.
Referenced by radio_control_impl_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ppm_decode_frame | ( | uint32_t | ppm_time | ) |
Decode a PPM frame.
A valid ppm frame:
Definition at line 103 of file ppm.c.
References FALSE, ppm_cur_pulse, ppm_data_valid, ppm_frame_available, ppm_last_pulse_time, ppm_pulses, RC_PPM_TICKS_OF_USEC, RssiValid, and TRUE.
| void radio_control_impl_event | ( | void(*)(void) | _received_frame_handler | ) |
| volatile bool_t ppm_frame_available |
Definition at line 32 of file ppm.c.
Referenced by ppm_decode_frame(), radio_control_impl_event(), radio_control_impl_init(), and send_ppm().
| uint16_t ppm_pulses[RADIO_CTL_NB] |
Definition at line 31 of file ppm.c.
Referenced by ppm_decode_frame(), radio_control_impl_event(), and update_rc_channel().
 1.8.8
1.8.8