|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for nav_flower.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_flower.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| bool_t | nav_flower_run (void) |
| bool_t | nav_flower_setup (uint8_t CenterWP, uint8_t EdgeWP) |
| bool_t nav_flower_run | ( | void | ) |
Definition at line 91 of file nav_flower.c.
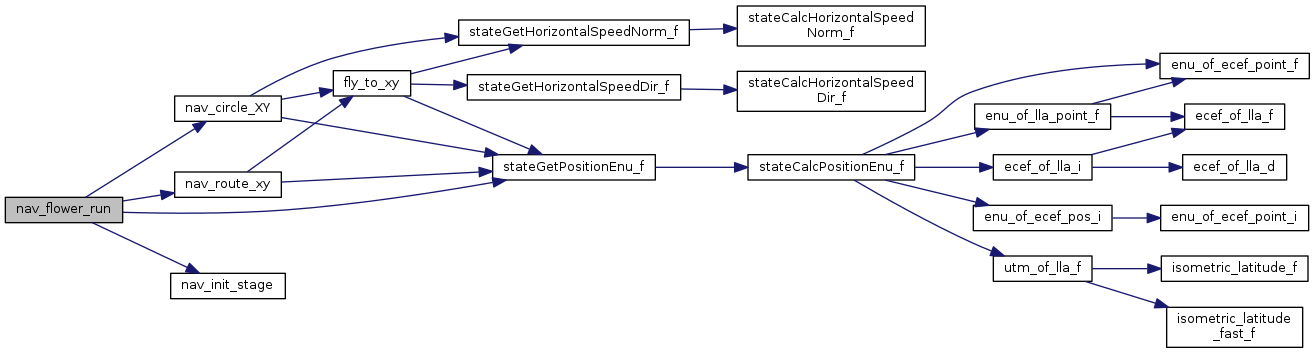
References Center, CFlowerStatus, Circle, CircleX, CircleY, DistanceFromCenter, Edge, EdgeCurrentX, EdgeCurrentY, FALSE, FlowerLine, Flowerradius, FlowerTheta, Fly2X, Fly2Y, FlyFromX, FlyFromY, nav_circle_XY(), nav_init_stage(), nav_radius, nav_route_xy(), NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, Outside, stateGetPositionEnu_f(), TransCurrentX, TransCurrentY, TRUE, waypoints, WaypointX, WaypointY, EnuCoor_f::x, and EnuCoor_f::y.
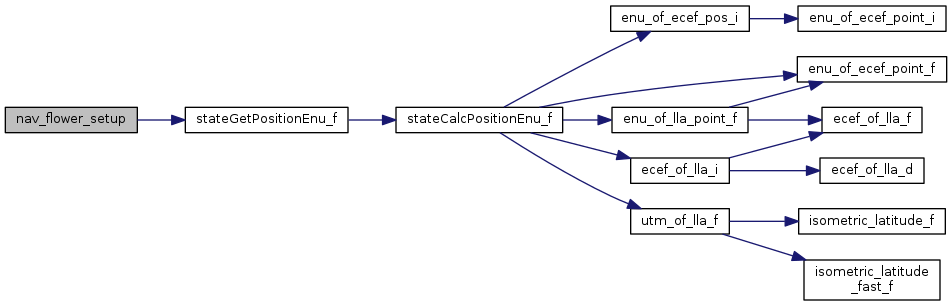
Here is the call graph for this function:Definition at line 60 of file nav_flower.c.
References Center, CFlowerStatus, CircleX, CircleY, DistanceFromCenter, Edge, EdgeCurrentX, EdgeCurrentY, FALSE, FlowerLine, Flowerradius, FlowerTheta, Fly2X, Fly2Y, FlyFromX, FlyFromY, Outside, stateGetPositionEnu_f(), TransCurrentX, TransCurrentY, WaypointX, WaypointY, EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function: 1.8.8
1.8.8