|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Device independent INS code. More...
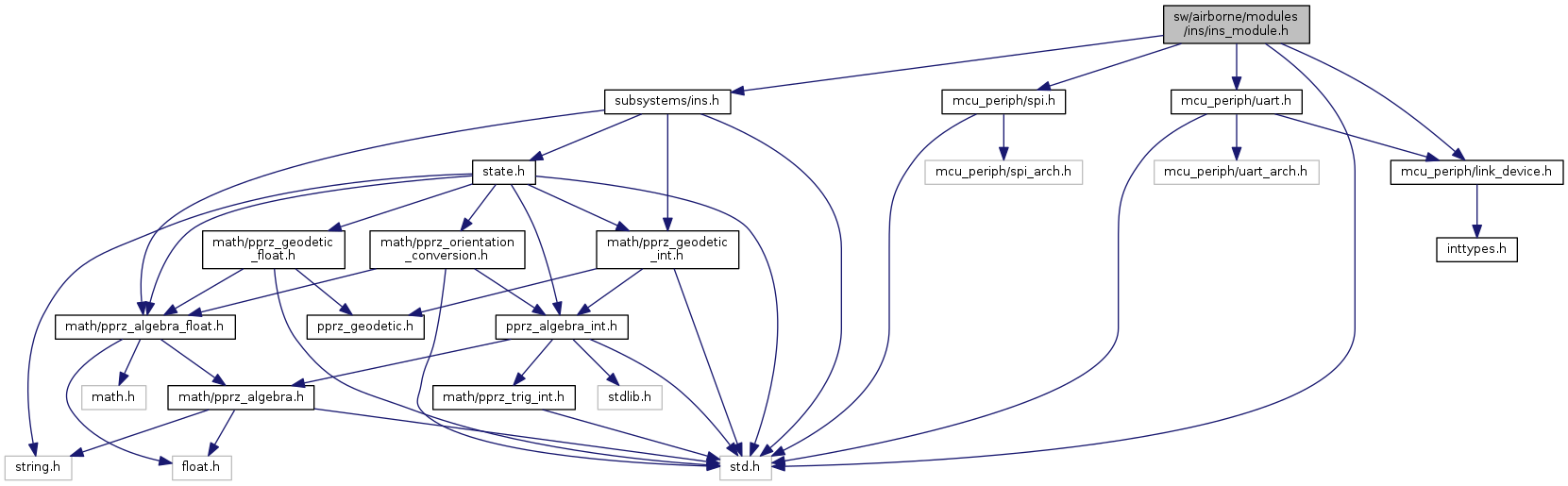
#include "std.h"#include "subsystems/ins.h"#include "mcu_periph/link_device.h"#include "mcu_periph/uart.h"#include "mcu_periph/spi.h" Include dependency graph for ins_module.h: This graph shows which files directly or indirectly include this file:
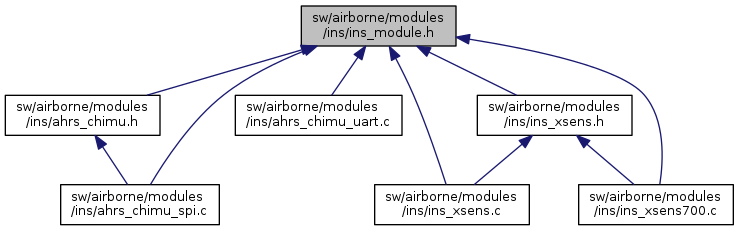
Include dependency graph for ins_module.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | INS_FORMAT float |
| #define | InsLinkDevice (&((INS_LINK).device)) |
| #define | InsSend1(c) InsLinkDevice->put_byte(InsLinkDevice->periph, c) |
| #define | InsUartSend1(c) InsSend1(c) |
| #define | InsSend(_dat, _len) { for (uint8_t i = 0; i< (_len); i++) InsSend1(_dat[i]); }; |
| #define | InsUartSetBaudrate(_b) uart_periph_set_baudrate(INS_LINK, _b) |
Functions | |
| void | handle_ins_msg (void) |
| void | parse_ins_msg (void) |
| void | parse_ins_buffer (uint8_t) |
| static void | ins_event_check_and_handle (void(*handler)(void)) |
| !SITL More... | |
Device independent INS code.
Definition in file ins_module.h.
| #define INS_FORMAT float |
Definition at line 35 of file ins_module.h.
Referenced by parse_ins_msg().
| #define InsLinkDevice (&((INS_LINK).device)) |
Definition at line 76 of file ins_module.h.
Referenced by ins_event_check_and_handle(), and parse_ins_msg().
Definition at line 84 of file ins_module.h.
Referenced by ahrs_chimu_init(), and ahrs_chimu_update_gps().
| #define InsSend1 | ( | c | ) | InsLinkDevice->put_byte(InsLinkDevice->periph, c) |
Definition at line 82 of file ins_module.h.
Referenced by ahrs_chimu_init().
| #define InsUartSend1 | ( | c | ) | InsSend1(c) |
Definition at line 83 of file ins_module.h.
Referenced by ahrs_chimu_init().
| #define InsUartSetBaudrate | ( | _b | ) | uart_periph_set_baudrate(INS_LINK, _b) |
Definition at line 85 of file ins_module.h.
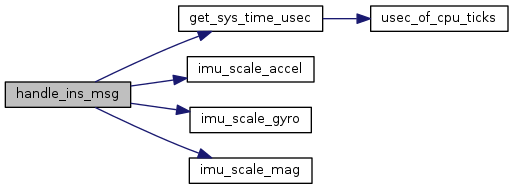
| void handle_ins_msg | ( | void | ) |
Definition at line 410 of file ins_xsens.c.
References Imu::accel, ImuXsens::accel_available, ACCEL_BFP_OF_REAL, Imu::accel_unscaled, GpsState::course, FALSE, GpsState::fix, get_sys_time_usec(), gps, GPS_FIX_3D, GpsState::gspeed, Imu::gyro, ImuXsens::gyro_available, Imu::gyro_unscaled, imu, imu_scale_accel(), imu_scale_gyro(), imu_scale_mag(), imu_xsens, IMU_XSENS_ID, ins_ax, ins_ay, ins_az, ins_mx, ins_my, ins_mz, ins_p, ins_q, ins_r, ins_vx, ins_vy, ins_vz, Imu::mag, ImuXsens::mag_available, MAG_BFP_OF_REAL, Imu::mag_unscaled, RATE_BFP_OF_REAL, RATES_ASSIGN, GpsState::speed_3d, and VECT3_ASSIGN.
Here is the call graph for this function:
|
inlinestatic |
!SITL
Definition at line 89 of file ins_module.h.
References link_device::char_available, dev, FALSE, link_device::get_byte, ins_msg_received, InsLinkDevice, parse_ins_buffer(), parse_ins_msg(), and link_device::periph.
Here is the call graph for this function:| void parse_ins_buffer | ( | uint8_t | ) |
Definition at line 714 of file ins_xsens.c.
References ck, GOT_BID, GOT_DATA, GOT_LEN, GOT_MID, GOT_START, ins_msg_received, TRUE, UNINIT, xsens_id, xsens_len, XSENS_MAX_PAYLOAD, xsens_msg_buf, xsens_msg_idx, and xsens_status.
Referenced by ins_event_check_and_handle().
Here is the caller graph for this function:
|
inline |
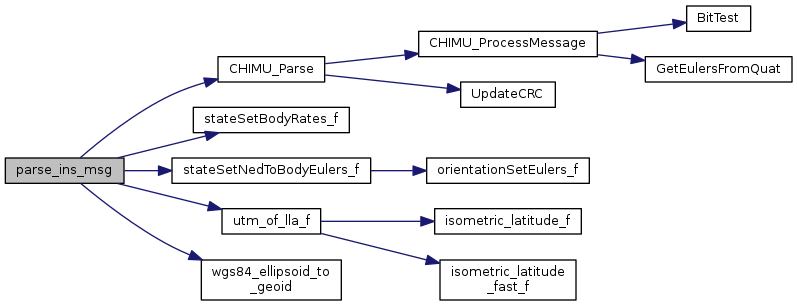
Definition at line 100 of file ahrs_chimu_spi.c.
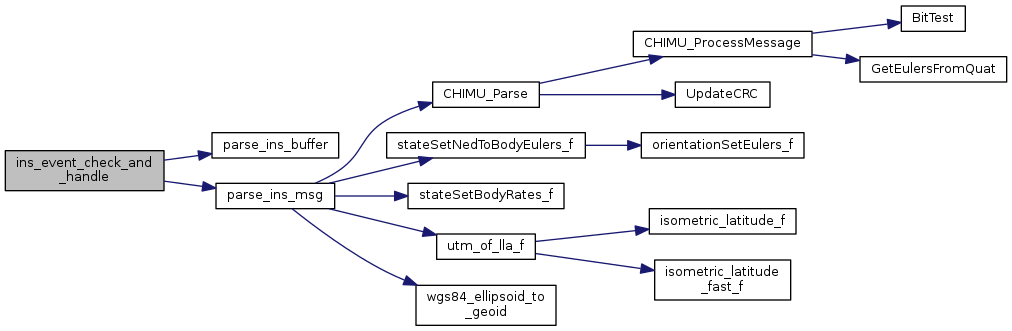
References ImuXsens::accel_available, ahrs_chimu, ahrs_chimu_id, LlaCoor_i::alt, UtmCoor_i::alt, link_device::char_available, CHIMU_Msg_3_IMU_Attitude, CHIMU_Parse(), SVinfo::cno, XsensTime::day, DefaultChannel, DefaultDevice, dev, UtmCoor_f::east, UtmCoor_i::east, CHIMU_attitude_data::euler, GpsState::fix, SVinfo::flags, link_device::get_byte, gps, GPS_FIX_2D, GPS_FIX_3D, GPS_FIX_NONE, GPS_NB_CHANNELS, ImuXsens::gyro_available, GpsState::hmsl, XsensTime::hour, imu_xsens, ins_ax, ins_ay, ins_az, INS_FORMAT, ins_mx, ins_my, ins_mz, ins_p, ins_phi, ins_psi, ins_q, ins_r, ins_theta, ins_vx, ins_vy, ins_vz, ins_x, ins_y, ins_z, InsLinkDevice, AhrsChimu::is_aligned, AhrsChimu::is_enabled, GpsState::last_3dfix_ticks, GpsState::last_3dfix_time, LlaCoor_f::lat, LlaCoor_i::lat, LED_ON, LED_TOGGLE, lla_f, LLA_FLOAT_OF_BFP, GpsState::lla_pos, LlaCoor_f::lon, LlaCoor_i::lon, CHIMU_PARSER_DATA::m_attitude, CHIMU_PARSER_DATA::m_attrates, CHIMU_PARSER_DATA::m_MsgID, CHIMU_PARSER_DATA::m_sensor, ImuXsens::mag_available, XsensTime::min, Min, XsensTime::month, XsensTime::nanosec, nav_utm_zone0, GpsState::nb_channels, sys_time::nb_sec, sys_time::nb_sec_rem, GpsState::ned_vel, new_ins_attitude, UtmCoor_f::north, UtmCoor_i::north, GpsState::num_sv, GpsState::pacc, GpsState::pdop, link_device::periph, CHIMU_Euler::phi, CHIMU_Euler::psi, SVinfo::qi, CHIMU_sensor_data::rate, GpsState::sacc, XsensTime::sec, stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), SVinfo::svid, GpsState::svinfos, CHIMU_Euler::theta, GpsState::tow, TRUE, utm_f, utm_of_lla_f(), GpsState::utm_pos, GpsState::week, wgs84_ellipsoid_to_geoid(), NedCoor_i::x, xsens_declination, xsens_errorcode, xsens_gps_arm_x, xsens_gps_arm_y, xsens_gps_arm_z, xsens_id, xsens_len, xsens_msg_buf, xsens_msg_status, xsens_msg_statusword, xsens_output_mode, xsens_output_settings, xsens_time, xsens_time_stamp, NedCoor_i::y, XsensTime::year, NedCoor_i::z, UtmCoor_f::zone, and UtmCoor_i::zone.
Referenced by ins_event_check_and_handle().
Here is the call graph for this function: Here is the caller graph for this function:| INS_FORMAT ins_ax |
Definition at line 71 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_ay |
Definition at line 72 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_az |
Definition at line 73 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| volatile uint8_t ins_msg_received |
Definition at line 64 of file ins_vn100.c.
Referenced by ins_event_check_and_handle().
| INS_FORMAT ins_mx |
Definition at line 76 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_my |
Definition at line 77 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_mz |
Definition at line 78 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_p |
Definition at line 66 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_phi |
Definition at line 61 of file ins_xsens.c.
Referenced by parse_ins_msg().
| INS_FORMAT ins_psi |
Definition at line 63 of file ins_xsens.c.
Referenced by parse_ins_msg().
| INS_FORMAT ins_q |
Definition at line 67 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_r |
Definition at line 68 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_theta |
Definition at line 62 of file ins_xsens.c.
Referenced by parse_ins_msg().
| INS_FORMAT ins_vx |
Definition at line 56 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_vy |
Definition at line 57 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_vz |
Definition at line 58 of file ins_xsens.c.
Referenced by handle_ins_msg(), and parse_ins_msg().
| INS_FORMAT ins_x |
Definition at line 51 of file ins_xsens.c.
Referenced by parse_ins_msg().
| INS_FORMAT ins_y |
Definition at line 52 of file ins_xsens.c.
Referenced by parse_ins_msg().
| INS_FORMAT ins_z |
Definition at line 53 of file ins_xsens.c.
Referenced by parse_ins_msg().
| volatile uint8_t new_ins_attitude |
Referenced by ahrs_chimu_init(), and parse_ins_msg().
 1.8.8
1.8.8