|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Simply converts GPS ECEF position and velocity to NED and passes it through to the state interface. More...
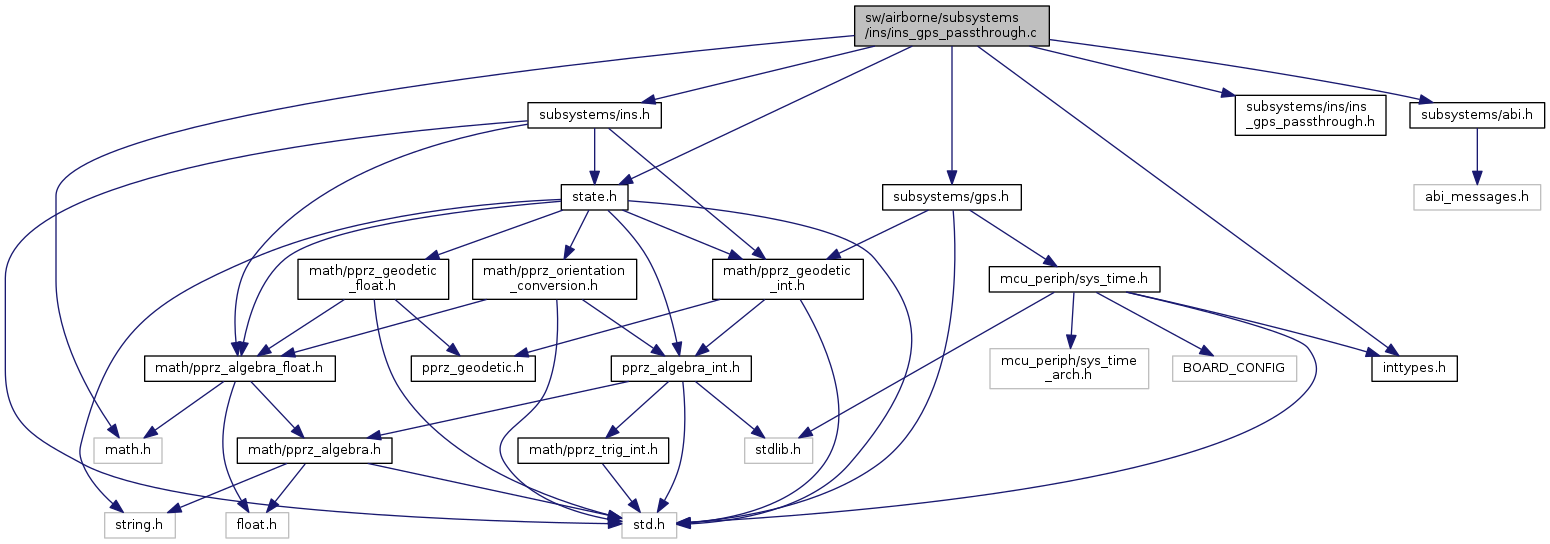
#include "subsystems/ins.h"#include <inttypes.h>#include <math.h>#include "state.h"#include "subsystems/gps.h"#include "subsystems/ins/ins_gps_passthrough.h"#include "subsystems/abi.h" Include dependency graph for ins_gps_passthrough.c:
Include dependency graph for ins_gps_passthrough.c:Go to the source code of this file.
Data Structures | |
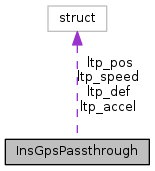
| struct | InsGpsPassthrough |
Macros | |
| #define | USE_INS_NAV_INIT TRUE |
Functions | |
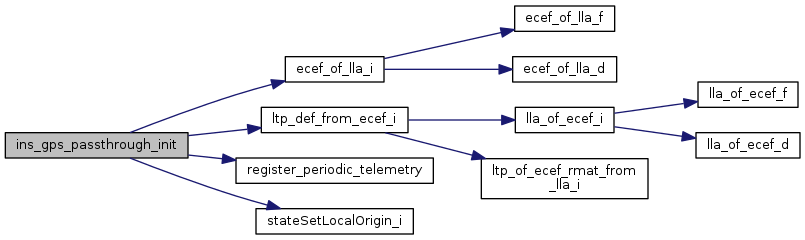
| void | ins_gps_passthrough_init (void) |
| void | ins_reset_local_origin (void) |
| INS local origin reset. More... | |
| void | ins_reset_altitude_ref (void) |
| INS altitude reference reset. More... | |
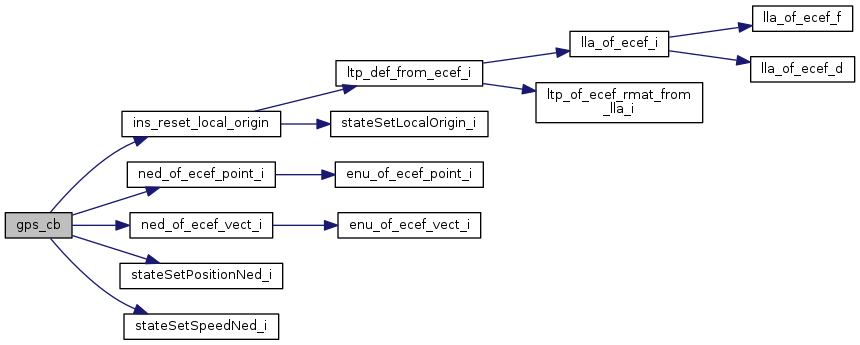
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| void | ins_gps_passthrough_register (void) |
Variables | |
| struct InsGpsPassthrough | ins_gp |
| static abi_event | gps_ev |
Simply converts GPS ECEF position and velocity to NED and passes it through to the state interface.
Definition in file ins_gps_passthrough.c.
| struct InsGpsPassthrough |
| #define USE_INS_NAV_INIT TRUE |
Definition at line 38 of file ins_gps_passthrough.c.
Definition at line 148 of file ins_gps_passthrough.c.
References GpsState::ecef_pos, GpsState::ecef_vel, GpsState::fix, GPS_FIX_3D, ins_gp, ins_reset_local_origin(), INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, INT32_SPEED_OF_CM_S_DEN, INT32_SPEED_OF_CM_S_NUM, INT32_VECT3_SCALE_2, InsGpsPassthrough::ltp_def, InsGpsPassthrough::ltp_initialized, InsGpsPassthrough::ltp_pos, InsGpsPassthrough::ltp_speed, ned_of_ecef_point_i(), ned_of_ecef_vect_i(), stateSetPositionNed_i(), and stateSetSpeedNed_i().
Referenced by ins_gps_passthrough_register().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_gps_passthrough_init | ( | void | ) |
Definition at line 91 of file ins_gps_passthrough.c.
References LlaCoor_i::alt, DefaultPeriodic, ecef_of_lla_i(), FALSE, LtpDef_i::hmsl, ins_gp, INT32_VECT3_ZERO, LlaCoor_i::lat, LlaCoor_i::lon, InsGpsPassthrough::ltp_accel, InsGpsPassthrough::ltp_def, ltp_def_from_ecef_i(), InsGpsPassthrough::ltp_initialized, InsGpsPassthrough::ltp_pos, InsGpsPassthrough::ltp_speed, register_periodic_telemetry(), stateSetLocalOrigin_i(), and TRUE.
Referenced by ins_gps_passthrough_register().
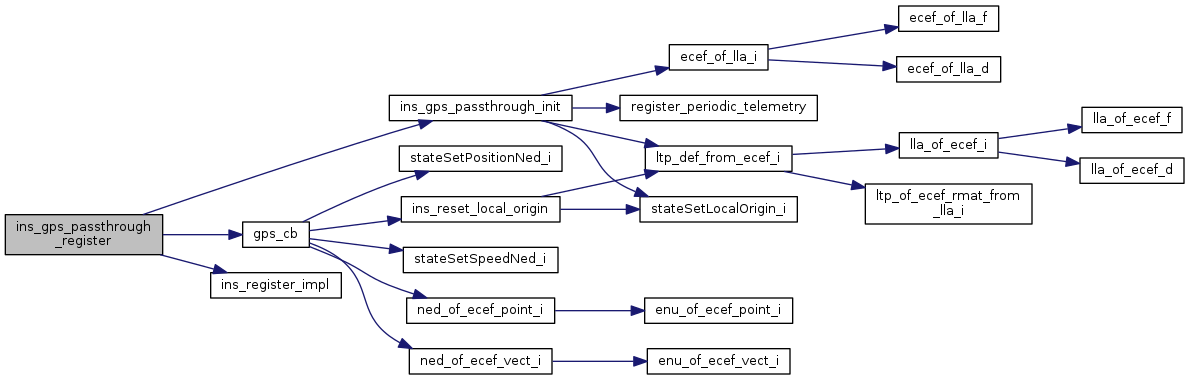
Here is the call graph for this function: Here is the caller graph for this function:| void ins_gps_passthrough_register | ( | void | ) |
Definition at line 173 of file ins_gps_passthrough.c.
References ABI_BROADCAST, gps_cb(), ins_gps_passthrough_init(), and ins_register_impl().
Here is the call graph for this function:| void ins_reset_altitude_ref | ( | void | ) |
INS altitude reference reset.
Reset only vertical reference to the current altitude. Does nothing if not implemented by specific INS algorithm.
Definition at line 133 of file ins_gps_passthrough.c.
References LlaCoor_i::alt, gps, GpsState::hmsl, LtpDef_i::hmsl, ins_gp, LlaCoor_i::lat, LtpDef_i::lla, GpsState::lla_pos, LlaCoor_i::lon, InsGpsPassthrough::ltp_def, ltp_def_from_lla_i(), State::ned_origin_i, state, and stateSetLocalOrigin_i().
Here is the call graph for this function:| void ins_reset_local_origin | ( | void | ) |
INS local origin reset.
Reset horizontal and vertical reference to the current position. Does nothing if not implemented by specific INS algorithm.
INS local origin reset.
Definition at line 124 of file ins_gps_passthrough.c.
References LlaCoor_i::alt, GpsState::ecef_pos, gps, GpsState::hmsl, LtpDef_i::hmsl, ins_gp, LtpDef_i::lla, GpsState::lla_pos, InsGpsPassthrough::ltp_def, ltp_def_from_ecef_i(), InsGpsPassthrough::ltp_initialized, stateSetLocalOrigin_i(), and TRUE.
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 147 of file ins_gps_passthrough.c.
| struct InsGpsPassthrough ins_gp |
Definition at line 58 of file ins_gps_passthrough.c.
Referenced by gps_cb(), ins_gps_passthrough_init(), ins_reset_altitude_ref(), and ins_reset_local_origin().
 1.8.8
1.8.8