|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Handling of messages coming from ground and other A/Cs. More...
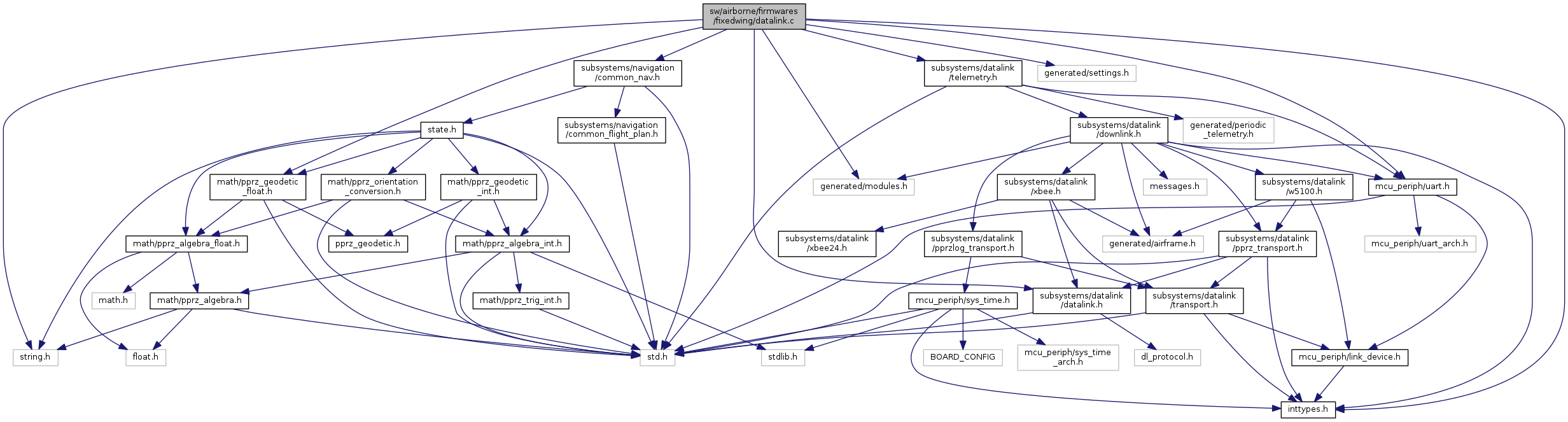
#include <inttypes.h>#include <string.h>#include "subsystems/datalink/datalink.h"#include "generated/modules.h"#include "subsystems/navigation/common_nav.h"#include "generated/settings.h"#include "math/pprz_geodetic_float.h"#include "mcu_periph/uart.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for datalink.c:
Include dependency graph for datalink.c:Go to the source code of this file.
Macros | |
| #define | DATALINK_C |
| #define | MODULES_DATALINK_C |
| #define | MOfCm(_x) (((float)(_x))/100.) |
| #define | MOfMM(_x) (((float)(_x))/1000.) |
| #define | SenderIdOfMsg(x) (x[0]) |
| #define | IdOfMsg(x) (x[1]) |
Functions | |
| void | dl_parse_msg (void) |
| Should be called when chars are available in dl_buffer. More... | |
Handling of messages coming from ground and other A/Cs.
Definition in file datalink.c.
| #define DATALINK_C |
Definition at line 28 of file datalink.c.
| #define IdOfMsg | ( | x | ) | (x[1]) |
Definition at line 81 of file datalink.c.
Referenced by dl_parse_msg().
| #define MODULES_DATALINK_C |
Definition at line 30 of file datalink.c.
| #define MOfCm | ( | _x | ) | (((float)(_x))/100.) |
Definition at line 77 of file datalink.c.
Referenced by dl_parse_msg().
| #define MOfMM | ( | _x | ) | (((float)(_x))/1000.) |
Definition at line 78 of file datalink.c.
Referenced by dl_parse_msg().
| #define SenderIdOfMsg | ( | x | ) | (x[0]) |
Definition at line 80 of file datalink.c.
Referenced by dl_parse_msg().
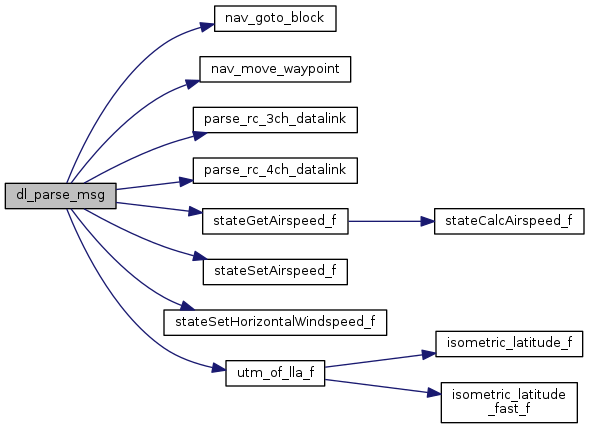
| void dl_parse_msg | ( | void | ) |
Should be called when chars are available in dl_buffer.
NAV
WIND_INFO
Else there is no dl_settings section in the flight plan
Definition at line 88 of file datalink.c.
References DefaultChannel, DefaultDevice, dl_buffer, UtmCoor_f::east, gps_nb_ovrn, IdOfMsg, infrared, LlaCoor_f::lat, LED_TOGGLE, LlaCoor_f::lon, MOfCm, MOfMM, nav_goto_block(), nav_move_waypoint(), nav_utm_east0, nav_utm_north0, nav_utm_zone0, UtmCoor_f::north, parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), Infrared::pitch, tcas_ac_status::resolve, Infrared::roll, SenderIdOfMsg, SetAcInfo, stateGetAirspeed_f(), stateSetAirspeed_f(), stateSetHorizontalWindspeed_f(), tcas_acs_status, the_acs_id, Infrared::top, TRUE, utm_of_lla_f(), val, waypoints, point::x, FloatVect2::x, point::y, FloatVect2::y, and UtmCoor_f::zone.
Here is the call graph for this function: 1.8.8
1.8.8