|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
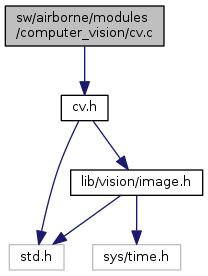
Computer vision framework for onboard processing. More...
#include "cv.h" Include dependency graph for cv.c:
Include dependency graph for cv.c:Go to the source code of this file.
Macros | |
| #define | MAX_CV_FUNC 10 |
Functions | |
| void | cv_add (cvFunction func) |
| void | cv_run (struct image_t *img) |
Variables | |
| int | cv_func_cnt = 0 |
| cvFunction | cv_func [MAX_CV_FUNC] |
Computer vision framework for onboard processing.
Definition in file cv.c.
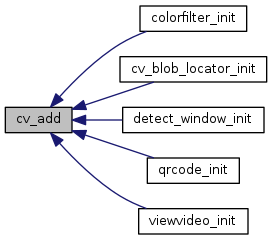
| void cv_add | ( | cvFunction | func | ) |
Definition at line 35 of file cv.c.
References cv_func, cv_func_cnt, and MAX_CV_FUNC.
Referenced by colorfilter_init(), cv_blob_locator_init(), detect_window_init(), qrcode_init(), and viewvideo_init().
Here is the caller graph for this function:| void cv_run | ( | struct image_t * | img | ) |
Definition at line 43 of file cv.c.
References cv_func, and cv_func_cnt.
Referenced by video_thread_function(), and video_thread_periodic().
Here is the caller graph for this function:| cvFunction cv_func[MAX_CV_FUNC] |
 1.8.8
1.8.8