|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Handling of CAN hardware for STM32. More...
#include <stdint.h>#include <string.h>#include "mcu_periph/can_arch.h"#include "mcu_periph/can.h"#include <libopencm3/stm32/rcc.h>#include <libopencm3/stm32/gpio.h>#include <libopencm3/stm32/can.h>#include <libopencm3/cm3/nvic.h>#include "led.h" Include dependency graph for can_arch.c:
Include dependency graph for can_arch.c:Go to the source code of this file.
Macros | |
| #define | NVIC_USB_LP_CAN_RX0_IRQ_PRIO 1 |
Functions | |
| void | _can_run_rx_callback (uint32_t id, uint8_t *buf, uint8_t len) |
| void | can_hw_init (void) |
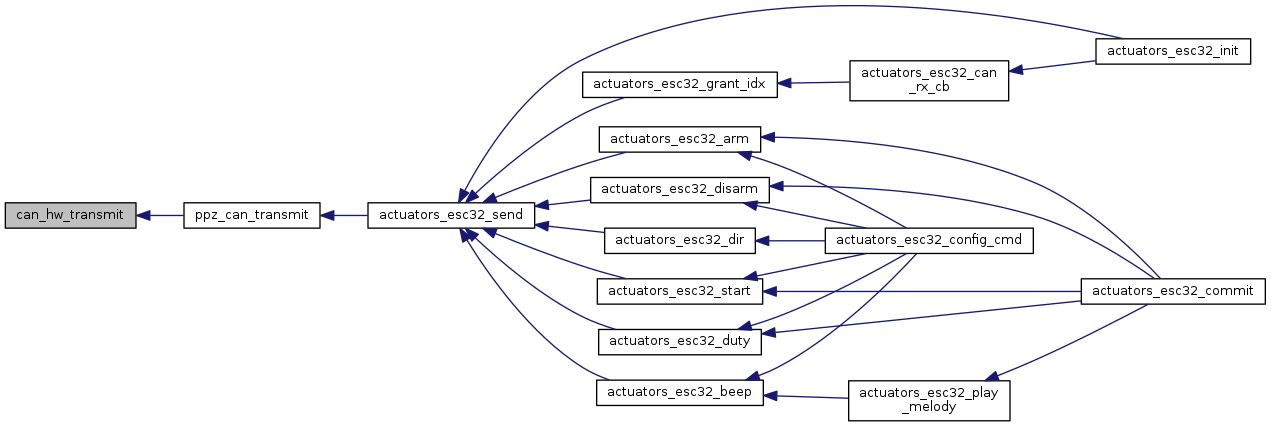
| int | can_hw_transmit (uint32_t id, const uint8_t *buf, uint8_t len) |
| void | usb_lp_can_rx0_isr (void) |
Variables | |
| bool | can_initialized = false |
Handling of CAN hardware for STM32.
Definition in file can_arch.c.
| #define NVIC_USB_LP_CAN_RX0_IRQ_PRIO 1 |
Definition at line 50 of file can_arch.c.
Referenced by can_hw_init().
Definition at line 43 of file can.c.
References can_rx_callback.
Referenced by usb_lp_can_rx0_isr().
Here is the caller graph for this function:| void can_hw_init | ( | void | ) |
Definition at line 57 of file can_arch.c.
References CAN1, can_initialized, gpio_set(), and NVIC_USB_LP_CAN_RX0_IRQ_PRIO.
Referenced by ppz_can_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 148 of file can_arch.c.
References CAN1, and can_initialized.
Referenced by ppz_can_transmit().
Here is the caller graph for this function:| void usb_lp_can_rx0_isr | ( | void | ) |
Definition at line 176 of file can_arch.c.
References _can_run_rx_callback(), and CAN1.
Here is the call graph for this function:| bool can_initialized = false |
Definition at line 55 of file can_arch.c.
Referenced by can_hw_init(), and can_hw_transmit().
 1.8.8
1.8.8