|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
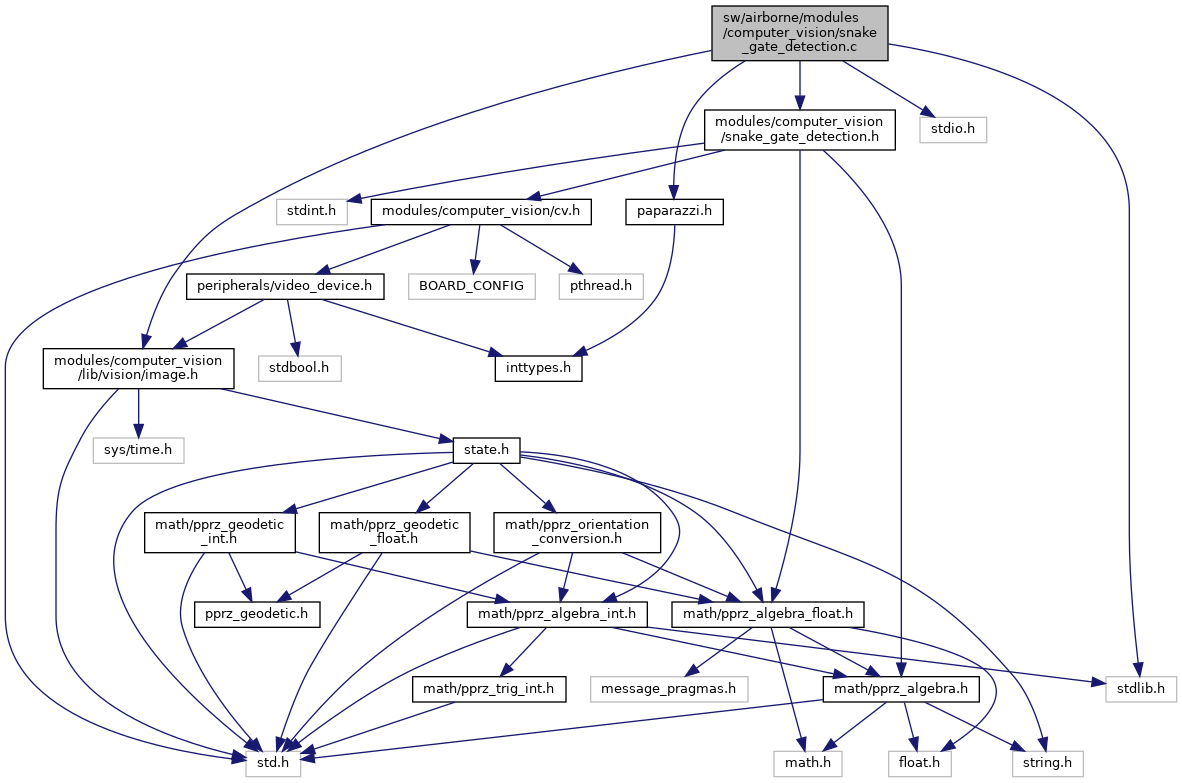
#include "modules/computer_vision/snake_gate_detection.h"#include <stdio.h>#include <stdlib.h>#include "modules/computer_vision/lib/vision/image.h"#include "paparazzi.h" Include dependency graph for snake_gate_detection.c:
Include dependency graph for snake_gate_detection.c:Go to the source code of this file.
Macros | |
| #define | SUCCESS_DETECT 1 |
| #define | FAIL_DETECT 0 |
| #define | FILTER_IMAGE 0 |
| #define | DRAW_GATE 1 |
Functions | |
| int | cmpfunc (const void *a, const void *b) |
| int | cmp_i (const void *a, const void *b) |
| float | segment_length (struct point_t Q1, struct point_t Q2) |
| Determine the segment length between two 2D-points. More... | |
| int | snake_gate_detection (struct image_t *img, int n_samples, int min_px_size, float min_gate_quality, float gate_thickness, int min_n_sides, uint8_t color_Ym, uint8_t color_YM, uint8_t color_Um, uint8_t color_UM, uint8_t color_Vm, uint8_t color_VM, struct gate_img *best_gate, struct gate_img *gates_c, int *n_gates, int exclude_top, int exclude_bottom) |
| Run snake gate detection on an image. More... | |
| void | draw_gate (struct image_t *im, struct gate_img gate) |
| Draw the gate on an image. More... | |
| void | draw_gate_color_polygon (struct image_t *im, struct gate_img gate, uint8_t *color) |
| Draw the gate on an image, using the corner points, possibly resulting in a polygon. More... | |
| void | draw_gate_color_square (struct image_t *im, struct gate_img gate, uint8_t *color) |
| Draw the gate on an image, using only the center coordinate and sizes - resulting in a square gate. More... | |
| void | check_gate_outline (struct image_t *im, struct gate_img gate, float *quality, int *n_sides) |
| Check only the outline of the gate. More... | |
| void | check_gate_initial (struct image_t *im, struct gate_img gate, float *quality, int *n_sides) |
| Check the outline and the center of the gate. More... | |
| float | check_inside (struct image_t *im, int x, int y, int sz, int n_samples_in) |
| void | check_line (struct image_t *im, struct point_t Q1, struct point_t Q2, int *n_points, int *n_colored_points) |
| Checks whether points on a line between two 2D-points are of a given color. More... | |
| void | snake_up_and_down (struct image_t *im, int x, int y, int *x_low, int *y_low, int *x_high, int *y_high) |
| The actual snaking. More... | |
| void | snake_left_and_right (struct image_t *im, int x, int y, int *x_low, int *y_low, int *x_high, int *y_high) |
| The actual snaking. More... | |
| void | set_gate_points (struct gate_img *gate) |
| Determine and set the corner locations in gate.x_corners, g.y_corners, based on the center of the gate and its size, assuming a square window. More... | |
| void | gate_refine_corners (struct image_t *color_image, int *x_points, int *y_points, int size) |
| Refine the four corners of the gate, based on the color around the supposed corner locations. More... | |
| void | refine_single_corner (struct image_t *im, int *corner_x, int *corner_y, int size, float size_factor) |
| Refine a single corner, based on the color around the coordinate. More... | |
| int | check_color_snake_gate_detection (struct image_t *im, int x, int y) |
| float | intersection_over_union (int x_box_1[4], int y_box_1[4], int x_box_2[4], int y_box_2[4]) |
| int | intersection_boxes (int x_box_1[4], int y_box_1[4], int x_box_2[4], int y_box_2[4]) |
| int | overlap_intervals (int val_low_1, int val_high_1, int val_low_2, int val_high_2) |
Variables | |
| uint8_t | green_color [4] = {255, 128, 255, 128} |
| uint8_t | blue_color [4] = {0, 128, 0, 128} |
| uint8_t | white_color [4] = {255, 255, 255, 255} |
| uint8_t | color_Y_min |
| uint8_t | color_Y_max |
| uint8_t | color_U_min |
| uint8_t | color_U_max |
| uint8_t | color_V_min |
| uint8_t | color_V_max |
| int | min_pixel_size |
| int | n_total_samples |
| struct gate_img | temp_check_gate |
| struct image_t | img_result |
| float | best_quality = 0 |
| float | best_fitness = 100000 |
| int * | array |
Detects gates as used in the IROS drone races, i.e., square colored gates. It does so with snake gate detection, a computationally efficient method that works onboard of the computationally constrained Parrot Bebop 1/2 drones.
An initial version of this algorithm ran in the drone race 2016. The algorithm was first described in: First autonomous multi-room exploration with an insect-inspired flapping wing vehicle, May 2018, IEEE International Conference on Robotics and Automation (ICRA 2018), Brisbane, Australia by Kirk Scheper, Matej Karasek, Christophe De Wagter, Bart Remes, and Guido de Croon https://www.researchgate.net/publication/327228053_First_autonomous_multi-room_exploration_with_an_insect-inspired_flapping_wing_vehicle
For the drone race, the algorithm and performance are described and analyzed in more detail in: Autonomous drone race: A novel vision-based navigation and control strategy, S.Li, M.M.O.I. Ozo, C. De Wagter, G.C.H.E. de Croon. Submitted.
Definition in file snake_gate_detection.c.
| #define DRAW_GATE 1 |
Definition at line 57 of file snake_gate_detection.c.
| #define FAIL_DETECT 0 |
Definition at line 53 of file snake_gate_detection.c.
| #define FILTER_IMAGE 0 |
Definition at line 56 of file snake_gate_detection.c.
| #define SUCCESS_DETECT 1 |
Definition at line 52 of file snake_gate_detection.c.
| int check_color_snake_gate_detection | ( | struct image_t * | im, |
| int | x, | ||
| int | y | ||
| ) |
Definition at line 1102 of file snake_gate_detection.c.
References check_color_yuv422(), color_U_max, color_U_min, color_V_max, color_V_min, color_Y_max, color_Y_min, n_total_samples, gate_img::x, and gate_img::y.
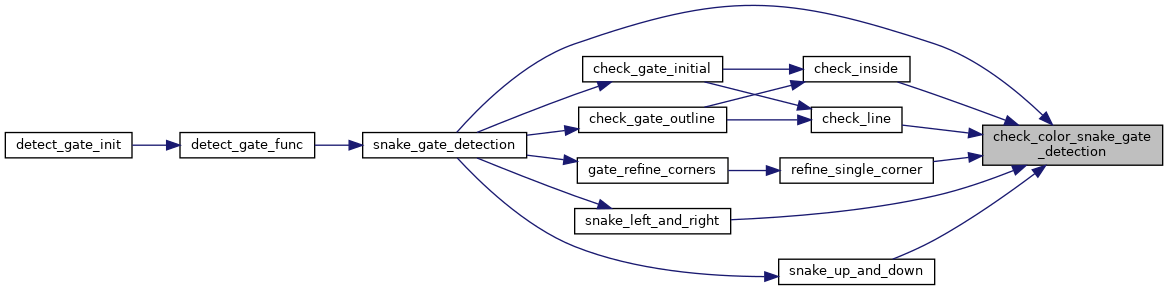
Referenced by check_inside(), check_line(), refine_single_corner(), snake_gate_detection(), snake_left_and_right(), and snake_up_and_down().
Here is the call graph for this function: Here is the caller graph for this function:| void check_gate_initial | ( | struct image_t * | im, |
| struct gate_img | gate, | ||
| float * | quality, | ||
| int * | n_sides | ||
| ) |
Check the outline and the center of the gate.
The outline should be of the right color. The inner part should be a different color, or else we may be looking at a distractor object. The gate does not yet have to have corners assigned in the struct.
| [in] | im | The input image. |
| [in] | gate | The gate to be checked. |
| [in] | quality | The ratio of rightly colored pixels, 1.0 is best, 0.0 is worst. If too many pixels inside the gate are of the right color, the quality is also 0. |
| [in] | sides | How many of the sides are sufficiently colored? |
Definition at line 673 of file snake_gate_detection.c.
References check_inside(), check_line(), gate_img::sz, gate_img::sz_left, gate_img::sz_right, gate_img::x, point_t::x, gate_img::y, and point_t::y.
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:| void check_gate_outline | ( | struct image_t * | im, |
| struct gate_img | gate, | ||
| float * | quality, | ||
| int * | n_sides | ||
| ) |
Check only the outline of the gate.
The gate must have corners already assigned in the struct.
| [in] | im | The input image. |
| [in] | gate | The gate to be checked. |
| [in] | quality | The ratio of rightly colored pixels, 1.0 is best, 0.0 is worst. |
| [in] | sides | How many of the sides are sufficiently colored? |
Definition at line 581 of file snake_gate_detection.c.
References check_inside(), check_line(), min_pixel_size, segment_length(), gate_img::sz, gate_img::x, point_t::x, gate_img::x_corners, gate_img::y, point_t::y, and gate_img::y_corners.
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:| float check_inside | ( | struct image_t * | im, |
| int | x, | ||
| int | y, | ||
| int | sz, | ||
| int | n_samples_in | ||
| ) |
Definition at line 761 of file snake_gate_detection.c.
References check_color_snake_gate_detection(), h(), n_samples, point_t::x, and point_t::y.
Referenced by check_gate_initial(), and check_gate_outline().
Here is the call graph for this function: Here is the caller graph for this function:| void check_line | ( | struct image_t * | im, |
| struct point_t | Q1, | ||
| struct point_t | Q2, | ||
| int * | n_points, | ||
| int * | n_colored_points | ||
| ) |
Checks whether points on a line between two 2D-points are of a given color.
| [in] | im | The input image. |
| [in] | Q1 | Point 1. |
| [in] | Q2 | Point 2. |
| [in] | n_points | The number of sampled points. |
| [in] | n_colored_points | The number of sampled points that were of the right color. |
Definition at line 818 of file snake_gate_detection.c.
References check_color_snake_gate_detection(), f, h(), point_t::x, and point_t::y.
Referenced by check_gate_initial(), and check_gate_outline().
Here is the call graph for this function: Here is the caller graph for this function:| int cmp_i | ( | const void * | a, |
| const void * | b | ||
| ) |
Definition at line 96 of file snake_gate_detection.c.
| int cmpfunc | ( | const void * | a, |
| const void * | b | ||
| ) |
Definition at line 90 of file snake_gate_detection.c.
References b.
Referenced by snake_gate_detection().
Here is the caller graph for this function:Draw the gate on an image.
| [in] | img | The output image. |
| [in] | gate | The gate to be drawn. |
Definition at line 478 of file snake_gate_detection.c.
References draw_gate_color_polygon(), and white_color.
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:Draw the gate on an image, using the corner points, possibly resulting in a polygon.
| [in] | img | The output image. |
| [in] | gate | The gate to be drawn. |
| [in] | color | The color of the lines, in UYVY format. |
Definition at line 491 of file snake_gate_detection.c.
References image_draw_crosshair(), image_draw_line_color(), gate_img::x, point_t::x, gate_img::x_corners, gate_img::y, point_t::y, and gate_img::y_corners.
Referenced by draw_gate(), refine_single_corner(), and snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:Draw the gate on an image, using only the center coordinate and sizes - resulting in a square gate.
| [in] | img | The output image. |
| [in] | gate | The gate to be drawn. |
| [in] | color | The color of the lines, in UYVY format. |
Definition at line 538 of file snake_gate_detection.c.
References image_draw_crosshair(), image_draw_line_color(), gate_img::sz, gate_img::sz_left, gate_img::sz_right, gate_img::x, point_t::x, gate_img::y, and point_t::y.
Here is the call graph for this function:| void gate_refine_corners | ( | struct image_t * | color_image, |
| int * | x_points, | ||
| int * | y_points, | ||
| int | size | ||
| ) |
Refine the four corners of the gate, based on the color around the supposed corner locations.
| [in] | color_image | The color image. |
| [in] | x_points | The x-coordinates of the gate. These will be updated. |
| [in] | y_points | The y-coordinates of the gate. These will be updated. |
| [in] | size | Full size of the gate. |
Definition at line 993 of file snake_gate_detection.c.
References refine_single_corner().
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:| int intersection_boxes | ( | int | x_box_1[4], |
| int | y_box_1[4], | ||
| int | x_box_2[4], | ||
| int | y_box_2[4] | ||
| ) |
Definition at line 1167 of file snake_gate_detection.c.
References overlap_intervals().
Referenced by intersection_over_union().
Here is the call graph for this function: Here is the caller graph for this function:| float intersection_over_union | ( | int | x_box_1[4], |
| int | y_box_1[4], | ||
| int | x_box_2[4], | ||
| int | y_box_2[4] | ||
| ) |
Definition at line 1131 of file snake_gate_detection.c.
References intersection_boxes().
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:| int overlap_intervals | ( | int | val_low_1, |
| int | val_high_1, | ||
| int | val_low_2, | ||
| int | val_high_2 | ||
| ) |
Definition at line 1183 of file snake_gate_detection.c.
Referenced by intersection_boxes().
Here is the caller graph for this function:| void refine_single_corner | ( | struct image_t * | im, |
| int * | corner_x, | ||
| int * | corner_y, | ||
| int | size, | ||
| float | size_factor | ||
| ) |
Refine a single corner, based on the color around the coordinate.
| [in] | im | The color image. |
| [in] | corner_x | The corner's initial x-coordinate |
| [in] | corner_y | The corner's initial y-coordinate |
| [in] | size | Full size of the gate. |
| [in] | size_factor | The ratio of the size in which we will look for a better corner location. |
Definition at line 1013 of file snake_gate_detection.c.
References check_color_snake_gate_detection(), draw_gate_color_polygon(), green_color, image_t::h, image_t::w, gate_img::x_corners, and gate_img::y_corners.
Referenced by gate_refine_corners().
Here is the call graph for this function: Here is the caller graph for this function:Determine the segment length between two 2D-points.
| [in] | Q1 | Point 1. |
| [in] | Q2 | Point 2. |
Definition at line 802 of file snake_gate_detection.c.
References point_t::x, and point_t::y.
Referenced by check_gate_outline().
Here is the caller graph for this function:| void set_gate_points | ( | struct gate_img * | gate | ) |
Determine and set the corner locations in gate.x_corners, g.y_corners, based on the center of the gate and its size, assuming a square window.
| [in] | gate | The gate struct with the relevant information. |
Definition at line 971 of file snake_gate_detection.c.
References gate_img::sz, gate_img::x, gate_img::x_corners, gate_img::y, and gate_img::y_corners.
Referenced by snake_gate_detection().
Here is the caller graph for this function:| int snake_gate_detection | ( | struct image_t * | img, |
| int | n_samples, | ||
| int | min_px_size, | ||
| float | min_gate_quality, | ||
| float | gate_thickness, | ||
| int | min_n_sides, | ||
| uint8_t | color_Ym, | ||
| uint8_t | color_YM, | ||
| uint8_t | color_Um, | ||
| uint8_t | color_UM, | ||
| uint8_t | color_Vm, | ||
| uint8_t | color_VM, | ||
| struct gate_img * | best_gate, | ||
| struct gate_img * | gates_c, | ||
| int * | n_gates, | ||
| int | exclude_top, | ||
| int | exclude_bottom | ||
| ) |
Run snake gate detection on an image.
It assumes that it gets images over time, and remembers previous detections.
Snake gate takes samples from an image. If a sample corresponds to the target color, it will then go up and down, and afterwards left and right, in order to find chains of pixels of the right color. This forms the initial guess for a square approximation to the gate. Then, the estimate is refined, by looking around the supposed corner locations. This leads to a polygon gate.
| [out] | success | Whether a gate was detected |
| [in] | img | The input image. We will draw in it. |
| [in] | n_samples | The number of samples taken to find a gate - proportional to the computational effort and detection performance. |
| [in] | min_px_size | The minimum pixel size an initial, purely square detection should have |
| [in] | min_gate_quality | How much percentage of the initial square outline needs to have the target color. |
| [in] | gate_thickness | After snaking, how much the extreme coordinates have to be adjusted. |
| [in] | color_ym | The Y minimum value |
| [in] | color_yM | The Y maximum value |
| [in] | color_um | The U minimum value |
| [in] | color_uM | The U maximum value |
| [in] | color_vm | The V minimum value |
| [in] | color_vM | The V maximum value |
| [out] | *best_gate | This gate_img struct will be filled with the data of the best detected gate. |
| [out] | *gates_c | Array of gates with size MAX_GATES |
| [in] | exclude_top | The number of pixels excluded for sampling at the top of the image. |
| [in] | exclude_bottom | The number of pixels excluded for sampling at the bottom of the image. |
Definition at line 135 of file snake_gate_detection.c.
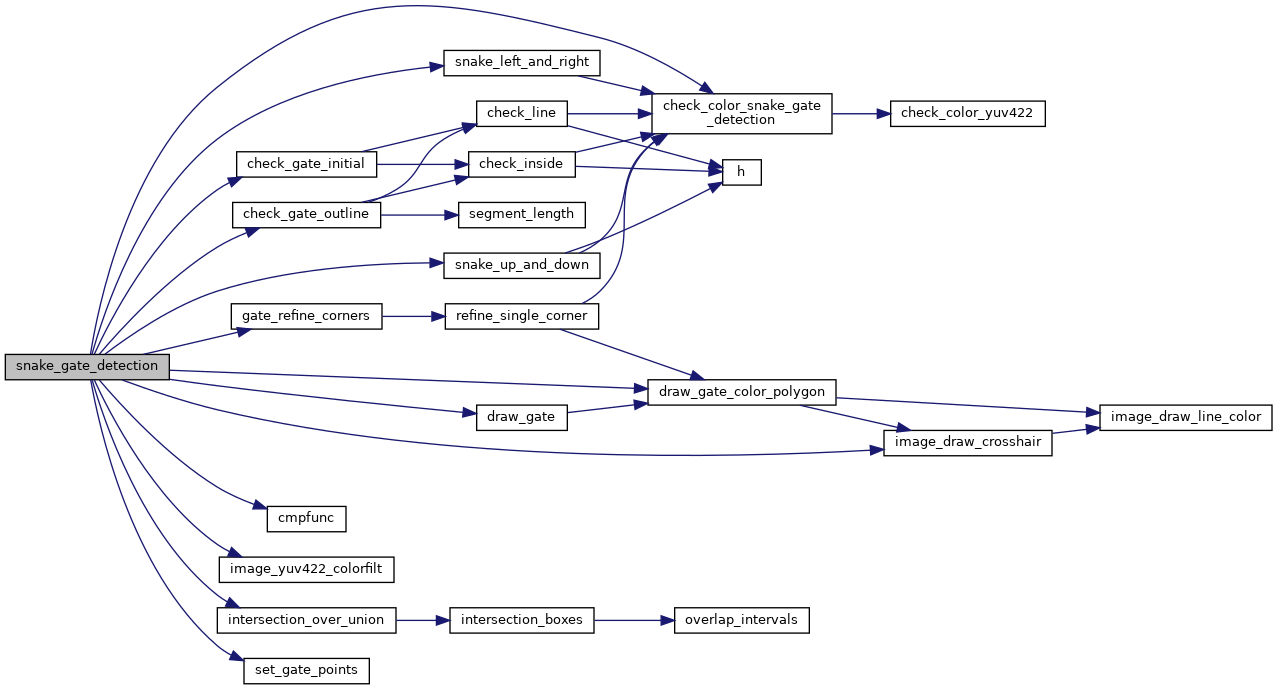
References best_gate, best_quality, blue_color, check_color_snake_gate_detection(), check_gate_initial(), check_gate_outline(), cmpfunc(), color_U_max, color_U_min, color_Um, color_UM, color_V_max, color_V_min, color_Vm, color_VM, color_Y_max, color_Y_min, color_Ym, color_YM, DRAW_GATE, draw_gate(), draw_gate_color_polygon(), exclude_bottom, exclude_top, FAIL_DETECT, FILTER_IMAGE, gate_refine_corners(), gate_thickness, gates_c, green_color, image_t::h, image_draw_crosshair(), image_yuv422_colorfilt(), intersection_over_union(), MAX_GATES, min_gate_quality, min_n_sides, min_pixel_size, min_px_size, n_samples, gate_img::n_sides, n_total_samples, gate_img::quality, set_gate_points(), snake_left_and_right(), snake_up_and_down(), SUCCESS_DETECT, gate_img::sz, gate_img::sz_left, gate_img::sz_right, image_t::w, white_color, gate_img::x, point_t::x, gate_img::x_corners, gate_img::y, and gate_img::y_corners.
Referenced by detect_gate_func().
Here is the call graph for this function: Here is the caller graph for this function:| void snake_left_and_right | ( | struct image_t * | im, |
| int | x, | ||
| int | y, | ||
| int * | x_low, | ||
| int * | y_low, | ||
| int * | x_high, | ||
| int * | y_high | ||
| ) |
The actual snaking.
An "agent" starts at (x,y) and goes as far as possible left and right (x-direction), keeping a chain of "connected" target color pixels. The agent can go slightly to the top and bottom.
| [in] | im | The input image. |
| [in] | x | The initial x-coordinate |
| [in] | y | The initial y-coordinate |
| [in] | x_low | The current lowest x-estimate |
| [in] | y_low | The y-coordinate that corresponds to the current x_low |
| [in] | x_high | The current highest x-estimate |
| [in] | y_high | The y-coordinate that corresponds to the current x_high |
Definition at line 919 of file snake_gate_detection.c.
References check_color_snake_gate_detection(), image_t::h, point_t::x, and point_t::y.
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:| void snake_up_and_down | ( | struct image_t * | im, |
| int | x, | ||
| int | y, | ||
| int * | x_low, | ||
| int * | y_low, | ||
| int * | x_high, | ||
| int * | y_high | ||
| ) |
The actual snaking.
An "agent" starts at (x,y) and goes as far as possible up and down (y-direction), keeping a chain of "connected" target color pixels. The agent can go slightly to the right and left.
| [in] | im | The input image. |
| [in] | x | The initial x-coordinate |
| [in] | y | The initial y-coordinate |
| [in] | x_low | The x-coordinate that corresponds to the current y_low. |
| [in] | y_low | The current lowest y-estimate |
| [in] | x_high | The x-coordinate that corresponds to the current y_high |
| [in] | y_high | The current highest y-estimate |
Definition at line 859 of file snake_gate_detection.c.
References check_color_snake_gate_detection(), image_t::h, h(), image_t::w, point_t::x, and point_t::y.
Referenced by snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:| int* array |
Definition at line 94 of file snake_gate_detection.c.
Referenced by add_array_to_buffer(), cmp_i(), is_sequence_in_array(), mean_f(), mean_i(), seq_in_array(), sum_f(), variance_f(), and variance_i().
| float best_fitness = 100000 |
Definition at line 83 of file snake_gate_detection.c.
| float best_quality = 0 |
Definition at line 82 of file snake_gate_detection.c.
Referenced by snake_gate_detection().
| uint8_t blue_color[4] = {0, 128, 0, 128} |
Definition at line 61 of file snake_gate_detection.c.
Referenced by snake_gate_detection().
| uint8_t color_U_max |
Definition at line 68 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| uint8_t color_U_min |
Definition at line 67 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| uint8_t color_V_max |
Definition at line 70 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| uint8_t color_V_min |
Definition at line 69 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| uint8_t color_Y_max |
Definition at line 66 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| uint8_t color_Y_min |
Definition at line 65 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| uint8_t green_color[4] = {255, 128, 255, 128} |
Definition at line 60 of file snake_gate_detection.c.
Referenced by refine_single_corner(), and snake_gate_detection().
| struct image_t img_result |
Definition at line 81 of file snake_gate_detection.c.
| int min_pixel_size |
Definition at line 73 of file snake_gate_detection.c.
Referenced by check_gate_outline(), and snake_gate_detection().
| int n_total_samples |
Definition at line 77 of file snake_gate_detection.c.
Referenced by check_color_snake_gate_detection(), and snake_gate_detection().
| struct gate_img temp_check_gate |
Definition at line 80 of file snake_gate_detection.c.
| uint8_t white_color[4] = {255, 255, 255, 255} |
Definition at line 62 of file snake_gate_detection.c.
Referenced by draw_gate(), and snake_gate_detection().
 1.8.17
1.8.17