|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
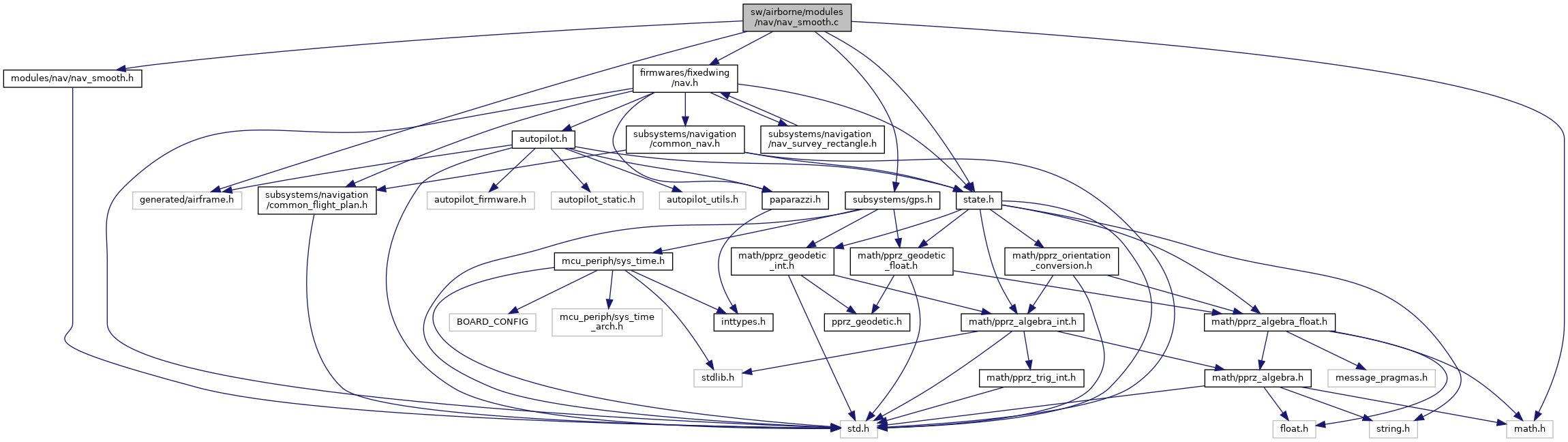
#include <math.h>#include "generated/airframe.h"#include "modules/nav/nav_smooth.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include "subsystems/gps.h" Include dependency graph for nav_smooth.c:
Include dependency graph for nav_smooth.c:Go to the source code of this file.
Macros | |
| #define | Sign(_x) ((_x) > 0 ? 1 : (-1)) |
| #define | Norm2Pi(x) ({ uint8_t _i=1; float _x = x; while (_i && _x < 0.) { _i++;_x += 2*M_PI; } while (_i && _x > 2*M_PI) { _i++; _x -= 2*M_PI; } _x; }) |
| #define | NB_ANGLES 24 |
| #define | ANGLE_STEP (2.*M_PI/NB_ANGLES) |
Functions | |
| bool | snav_init (uint8_t a, float desired_course_rad, float radius) |
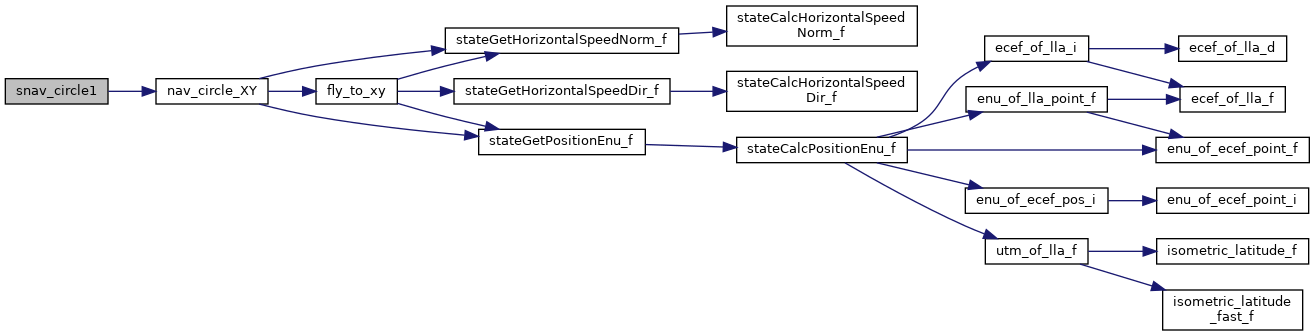
| bool | snav_circle1 (void) |
| bool | snav_route (void) |
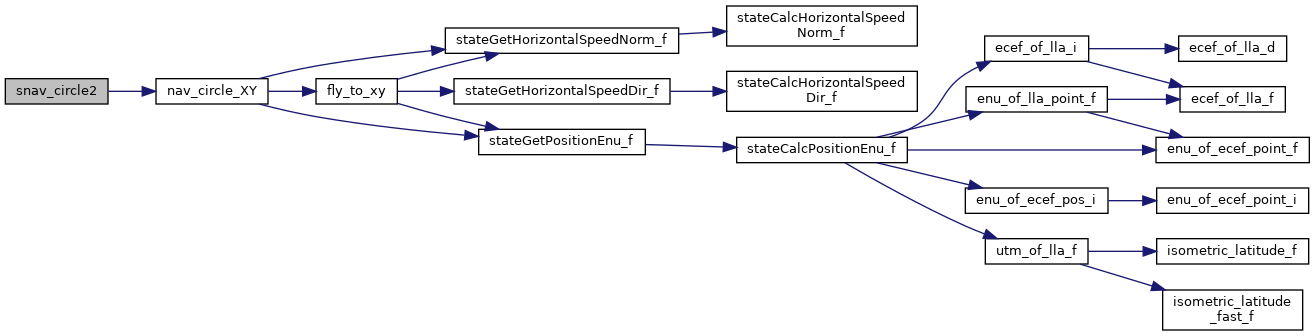
| bool | snav_circle2 (void) |
| static float | ground_speed_of_course (float x) |
| static bool | compute_ground_speed (float airspeed, float wind_east, float wind_north) |
| bool | snav_on_time (float nominal_radius) |
Variables | |
| static struct point wp_cd wp_td wp_ca | wp_ta |
| static float | d_radius |
| static float | a_radius |
| static float | qdr_td |
| static float | qdr_a |
| static uint8_t | wp_a |
| float | snav_desired_tow |
| static float | u_a_ca_x |
| static float | u_a_ca_y |
| static uint8_t | ground_speed_timer |
| static float | ground_speeds [NB_ANGLES] |
Smooth navigation to wp_a along an arc (around wp_cd), a segment (from wp_rd to wp_ta) and a second arc (around wp_ca).
Definition in file nav_smooth.c.
| #define ANGLE_STEP (2.*M_PI/NB_ANGLES) |
Definition at line 151 of file nav_smooth.c.
| #define NB_ANGLES 24 |
Definition at line 150 of file nav_smooth.c.
| #define Norm2Pi | ( | x | ) | ({ uint8_t _i=1; float _x = x; while (_i && _x < 0.) { _i++;_x += 2*M_PI; } while (_i && _x > 2*M_PI) { _i++; _x -= 2*M_PI; } _x; }) |
Definition at line 37 of file nav_smooth.c.
| #define Sign | ( | _x | ) | ((_x) > 0 ? 1 : (-1)) |
Definition at line 36 of file nav_smooth.c.
|
static |
Definition at line 163 of file nav_smooth.c.
References alpha, ANGLE_STEP, c(), ground_speeds, and NB_ANGLES.
Referenced by snav_on_time().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 154 of file nav_smooth.c.
References ANGLE_STEP, ground_speeds, Norm2Pi, and point::x.
Referenced by snav_on_time().
Here is the caller graph for this function:| bool snav_circle1 | ( | void | ) |
Definition at line 121 of file nav_smooth.c.
References d_radius, nav_circle_XY(), NavQdrCloseTo, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, and qdr_td.
Here is the call graph for this function:| bool snav_circle2 | ( | void | ) |
Definition at line 140 of file nav_smooth.c.
References a_radius, nav_circle_XY(), NavQdrCloseTo, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, and qdr_a.
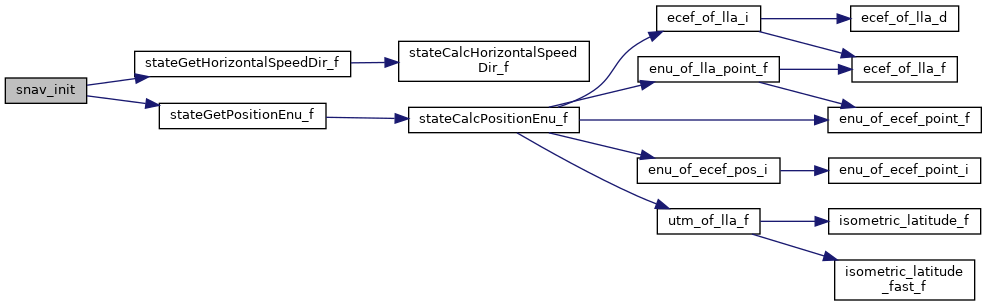
Here is the call graph for this function:| bool snav_init | ( | uint8_t | a, |
| float | desired_course_rad, | ||
| float | radius | ||
| ) |
Definition at line 49 of file nav_smooth.c.
References point::a, a_radius, alpha, d_radius, ground_speed_timer, qdr_a, qdr_td, Sign, stateGetHorizontalSpeedDir_f(), stateGetPositionEnu_f(), u_a_ca_x, u_a_ca_y, WaypointAlt, WaypointX, WaypointY, wp_a, wp_ta, point::x, EnuCoor_f::x, point::y, and EnuCoor_f::y.
Here is the call graph for this function:| bool snav_on_time | ( | float | nominal_radius | ) |
Definition at line 183 of file nav_smooth.c.
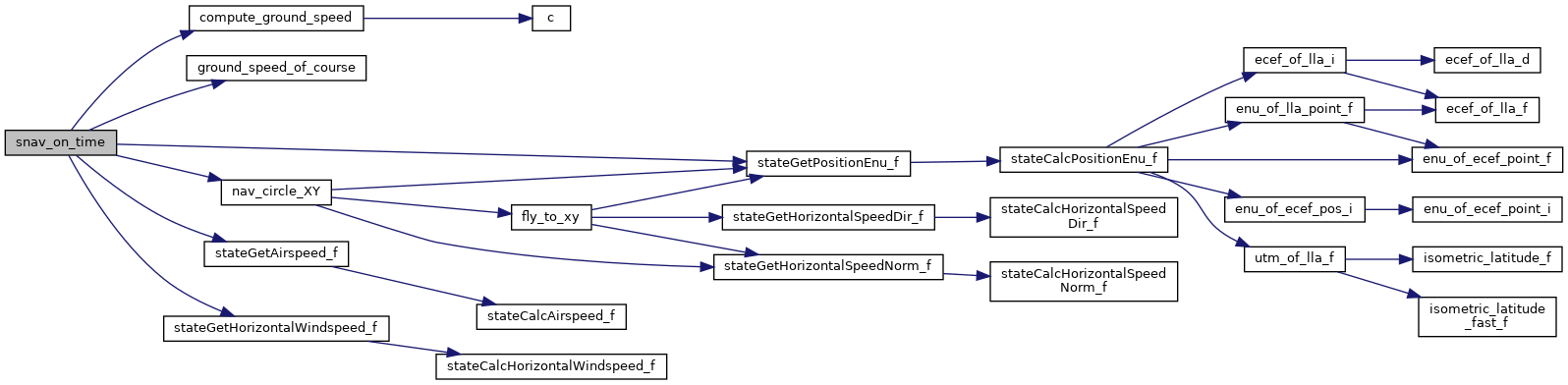
References point::a, a_radius, ANGLE_STEP, compute_ground_speed(), gps, ground_speed_of_course(), ground_speed_timer, nav_circle_XY(), NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, Norm2Pi, qdr_a, Sign, snav_desired_tow, stateGetAirspeed_f(), stateGetHorizontalWindspeed_f(), stateGetPositionEnu_f(), GpsState::tow, u_a_ca_x, u_a_ca_y, WaypointX, WaypointY, wp_a, point::x, and point::y.
Here is the call graph for this function:| bool snav_route | ( | void | ) |
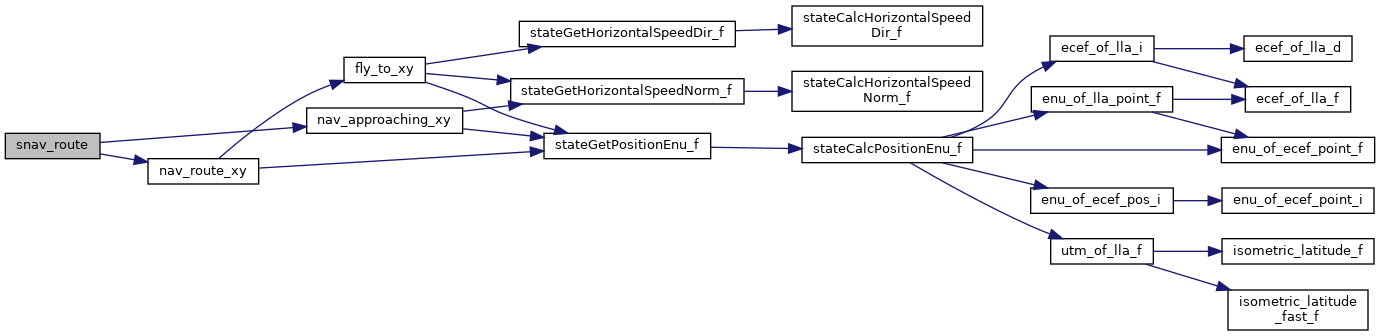
Definition at line 130 of file nav_smooth.c.
References CARROT, nav_approaching_xy(), nav_route_xy(), NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, wp_ta, point::x, and point::y.
Here is the call graph for this function:
|
static |
Definition at line 40 of file nav_smooth.c.
Referenced by snav_circle2(), snav_init(), and snav_on_time().
|
static |
Definition at line 40 of file nav_smooth.c.
Referenced by snav_circle1(), and snav_init().
|
static |
Definition at line 46 of file nav_smooth.c.
Referenced by snav_init(), and snav_on_time().
|
static |
Definition at line 152 of file nav_smooth.c.
Referenced by compute_ground_speed(), and ground_speed_of_course().
|
static |
Definition at line 42 of file nav_smooth.c.
Referenced by snav_circle2(), snav_init(), and snav_on_time().
|
static |
Definition at line 41 of file nav_smooth.c.
Referenced by snav_circle1(), and snav_init().
| float snav_desired_tow |
Definition at line 44 of file nav_smooth.c.
Referenced by snav_on_time().
|
static |
Definition at line 45 of file nav_smooth.c.
Referenced by snav_init(), and snav_on_time().
|
static |
Definition at line 45 of file nav_smooth.c.
Referenced by snav_init(), and snav_on_time().
|
static |
Definition at line 43 of file nav_smooth.c.
Referenced by snav_init(), and snav_on_time().
|
static |
Definition at line 39 of file nav_smooth.c.
Referenced by snav_init(), and snav_route().
 1.8.17
1.8.17