|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
gps landing system More...
 Include dependency graph for nav_gls.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_gls.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| bool | gls_start (uint8_t _af, uint8_t _sd, uint8_t _tod, uint8_t _td) |
| bool | gls_run (uint8_t _af, uint8_t _sd, uint8_t _tod, uint8_t _td) |
gps landing system
Definition in file nav_gls.h.
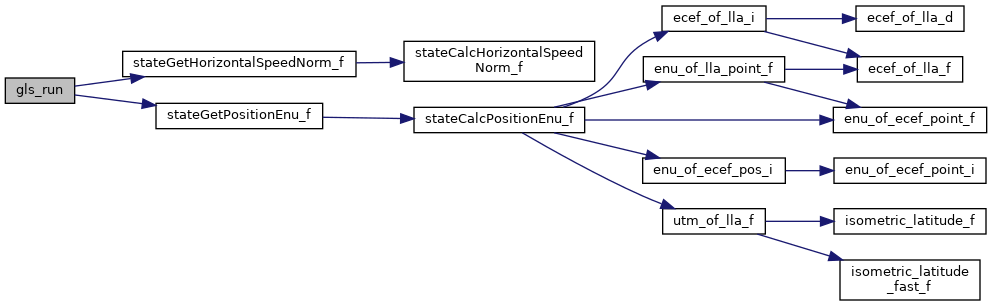
Definition at line 159 of file nav_gls.c.
References app_angle, app_distance_af_sd, app_intercept_rate, gs_on_final, init, Max, NavSegment, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, sd_intercept, sd_tod_x, sd_tod_y, stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), target_speed, v_ctl_auto_airspeed_setpoint, WaypointAlt, WaypointX, WaypointY, EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:Definition at line 135 of file nav_gls.c.
References app_angle, APP_ANGLE, app_distance_af_sd, APP_DISTANCE_AF_SD, app_intercept_rate, APP_INTERCEPT_RATE, APP_TARGET_SPEED, gls_compute_TOD(), init, and target_speed.
Here is the call graph for this function: 1.8.17
1.8.17