|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
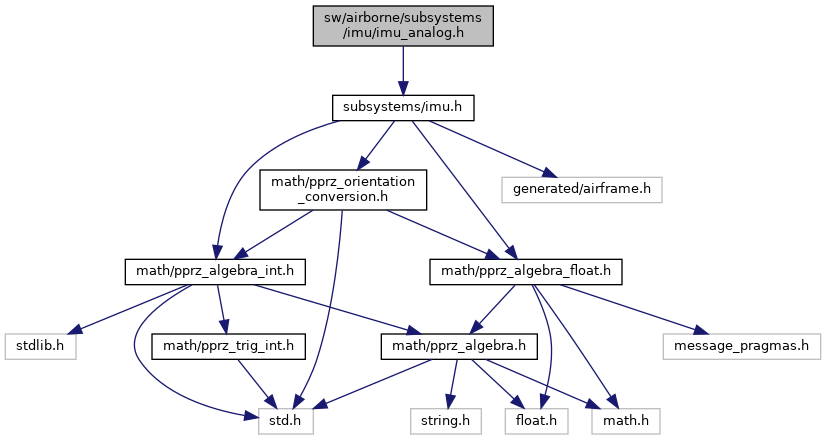
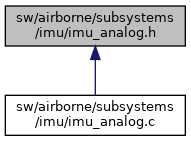
#include "subsystems/imu.h" Include dependency graph for imu_analog.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for imu_analog.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | NB_ANALOG_IMU_ADC 6 |
| #define | IMU_ACCEL_X_SENS_NUM 1 |
| #define | IMU_ACCEL_X_SENS_DEN 1 |
| #define | IMU_ACCEL_Y_SENS_NUM 1 |
| #define | IMU_ACCEL_Y_SENS_DEN 1 |
| #define | IMU_ACCEL_Z_SENS_NUM 1 |
| #define | IMU_ACCEL_Z_SENS_DEN 1 |
Functions | |
| void | imu_analog_init (void) |
| void | imu_analog_periodic (void) |
Variables | |
| int | imu_overrun |
Inertial Measurement Unit using onboard ADCs.
Definition in file imu_analog.h.
| #define IMU_ACCEL_X_SENS_DEN 1 |
Definition at line 57 of file imu_analog.h.
| #define IMU_ACCEL_X_SENS_NUM 1 |
Definition at line 56 of file imu_analog.h.
| #define IMU_ACCEL_Y_SENS_DEN 1 |
Definition at line 59 of file imu_analog.h.
| #define IMU_ACCEL_Y_SENS_NUM 1 |
Definition at line 58 of file imu_analog.h.
| #define IMU_ACCEL_Z_SENS_DEN 1 |
Definition at line 61 of file imu_analog.h.
| #define IMU_ACCEL_Z_SENS_NUM 1 |
Definition at line 60 of file imu_analog.h.
| #define NB_ANALOG_IMU_ADC 6 |
Definition at line 31 of file imu_analog.h.
| void imu_analog_init | ( | void | ) |
Definition at line 30 of file imu_analog.c.
References adc_buf_channel(), analog_imu_adc_buf, and imu_overrun.
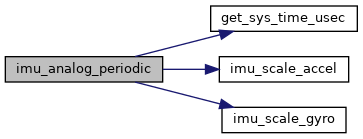
Here is the call graph for this function:| void imu_analog_periodic | ( | void | ) |
Definition at line 56 of file imu_analog.c.
References Imu::accel, Imu::accel_unscaled, analog_imu_adc_buf, get_sys_time_usec(), Imu::gyro, Imu::gyro_unscaled, adc_buf::head, imu, IMU_ANALOG_ID, imu_overrun, imu_scale_accel(), imu_scale_gyro(), Int32Rates::p, Int32Rates::q, Int32Rates::r, adc_buf::sum, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Here is the call graph for this function:| int imu_overrun |
Definition at line 26 of file imu_analog.c.
Referenced by imu_analog_init(), and imu_analog_periodic().
 1.8.17
1.8.17