|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
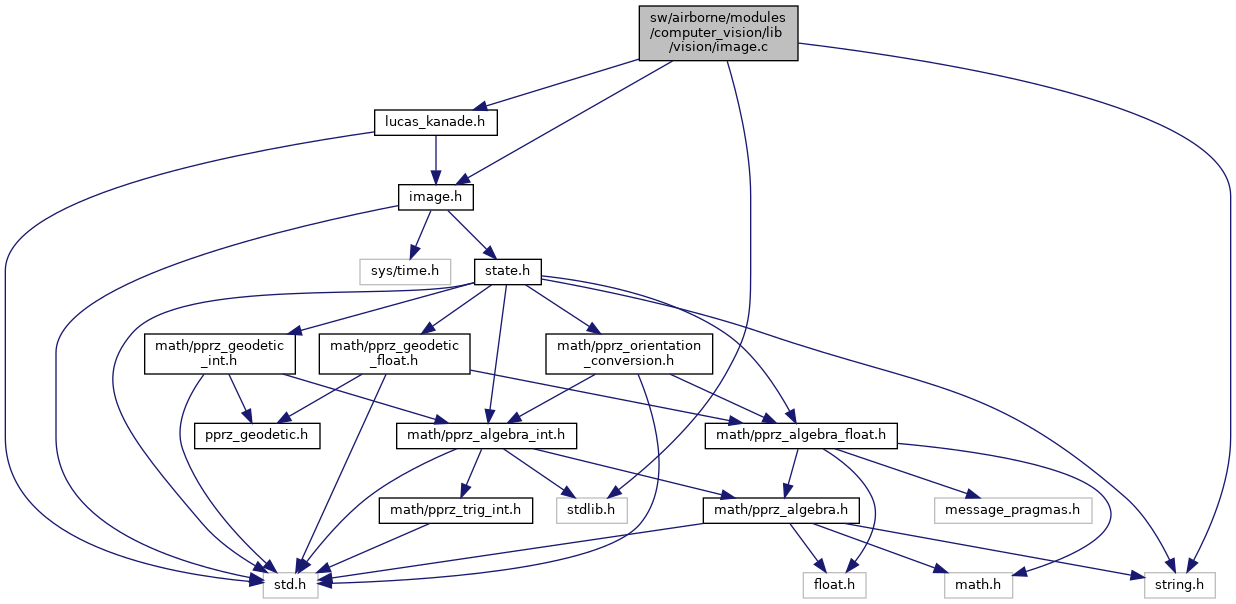
 Include dependency graph for image.c:
Include dependency graph for image.c:Go to the source code of this file.
Macros | |
| #define | CACHE_LINE_LENGTH 64 |
Functions | |
| void | image_create (struct image_t *img, uint16_t width, uint16_t height, enum image_type type) |
| Create a new image. More... | |
| void | image_free (struct image_t *img) |
| Free the image. More... | |
| void | image_copy (struct image_t *input, struct image_t *output) |
| Copy an image from inut to output This will only work if the formats are the same. More... | |
| void | image_switch (struct image_t *a, struct image_t *b) |
| This will switch image *a and *b This is faster as image_copy because it doesn't copy the whole image buffer. More... | |
| void | image_to_grayscale (struct image_t *input, struct image_t *output) |
| Convert an image to grayscale. More... | |
| uint16_t | image_yuv422_colorfilt (struct image_t *input, struct image_t *output, uint8_t y_m, uint8_t y_M, uint8_t u_m, uint8_t u_M, uint8_t v_m, uint8_t v_M) |
| Filter colors in an YUV422 image. More... | |
| int | check_color_yuv422 (struct image_t *im, int x, int y, uint8_t y_m, uint8_t y_M, uint8_t u_m, uint8_t u_M, uint8_t v_m, uint8_t v_M) |
| Checks the color of a single pixel in a YUV422 image. More... | |
| void | set_color_yuv422 (struct image_t *im, int x, int y, uint8_t Y, uint8_t U, uint8_t V) |
| Sets Y,U,V for a single pixel. More... | |
| void | image_yuv422_downsample (struct image_t *input, struct image_t *output, uint8_t downsample) |
| Simplified high-speed low CPU downsample function without averaging downsample factor must be 1, 2, 4, 8 ... More... | |
| void | image_add_border (struct image_t *input, struct image_t *output, uint8_t border_size) |
| This function adds padding to input image by mirroring the edge image elements. More... | |
| void | pyramid_next_level (struct image_t *input, struct image_t *output, uint8_t border_size) |
| This function takes previous padded pyramid level and outputs next level of pyramid without padding. More... | |
| void | pyramid_build (struct image_t *input, struct image_t *output_array, uint8_t pyr_level, uint16_t border_size) |
| This function populates given array of image_t structs with wanted number of padded pyramids based on given input. More... | |
| void | image_subpixel_window (struct image_t *input, struct image_t *output, struct point_t *center, uint32_t subpixel_factor, uint8_t border_size) |
| This outputs a subpixel window image in grayscale Currently only works with Grayscale images as input but could be upgraded to also support YUV422 images. More... | |
| void | image_gradients (struct image_t *input, struct image_t *dx, struct image_t *dy) |
| Calculate the gradients using the following matrix: [0 -1 0; -1 0 1; 0 1 0]. More... | |
| void | image_calculate_g (struct image_t *dx, struct image_t *dy, int32_t *g) |
| Calculate the G vector of an image gradient This is used for optical flow calculation. More... | |
| uint32_t | image_difference (struct image_t *img_a, struct image_t *img_b, struct image_t *diff) |
| Calculate the difference between two images and return the error This will only work with grayscale images. More... | |
| int32_t | image_multiply (struct image_t *img_a, struct image_t *img_b, struct image_t *mult) |
| Calculate the multiplication between two images and return the error This will only work with image gradients. More... | |
| void | image_show_points (struct image_t *img, struct point_t *points, uint16_t points_cnt) |
| Show points in an image by coloring them through giving the pixels the maximum value. More... | |
| void | image_show_points_color (struct image_t *img, struct point_t *points, uint16_t points_cnt, uint8_t *color) |
| Show points in an image by coloring them through giving the pixels the maximum value. More... | |
| void | image_show_flow (struct image_t *img, struct flow_t *vectors, uint16_t points_cnt, uint8_t subpixel_factor) |
| void | image_show_flow_color (struct image_t *img, struct flow_t *vectors, uint16_t points_cnt, uint8_t subpixel_factor, const uint8_t *color, const uint8_t *bad_color) |
| Shows the flow from a specific point to a new point This works on YUV422 and Grayscale images. More... | |
| void | image_gradient_pixel (struct image_t *img, struct point_t *loc, int method, int *dx, int *dy) |
| Get the gradient at a pixel location. More... | |
| void | image_draw_rectangle (struct image_t *img, int x_min, int x_max, int y_min, int y_max, uint8_t *color) |
| Draw a rectangle on the image. More... | |
| void | image_draw_crosshair (struct image_t *img, struct point_t *loc, const uint8_t *color, uint32_t size_crosshair) |
| Draw a cross-hair on the image. More... | |
| void | image_draw_line (struct image_t *img, struct point_t *from, struct point_t *to) |
| Draw a pink line on the image. More... | |
| void | image_draw_line_color (struct image_t *img, struct point_t *from, struct point_t *to, const uint8_t *color) |
| Draw a line on the image. More... | |
Image helper functions, like resizing, color filter, converters...
Definition in file image.c.
| int check_color_yuv422 | ( | struct image_t * | im, |
| int | x, | ||
| int | y, | ||
| uint8_t | y_m, | ||
| uint8_t | y_M, | ||
| uint8_t | u_m, | ||
| uint8_t | u_M, | ||
| uint8_t | v_m, | ||
| uint8_t | v_M | ||
| ) |
Checks the color of a single pixel in a YUV422 image.
1 means that it passes the filter, 0 that it does not.
| [in] | im | The input image to filter |
| [in] | x | The x-coordinate of the pixel |
| [in] | y | The y-coordinate of the pixel |
| [in] | y_m | The Y minimum value |
| [in] | y_M | The Y maximum value |
| [in] | u_m | The U minimum value |
| [in] | u_M | The U maximum value |
| [in] | v_m | The V minimum value |
| [in] | v_M | The V maximum value |
Definition at line 230 of file image.c.
References image_t::buf, image_t::h, and image_t::w.
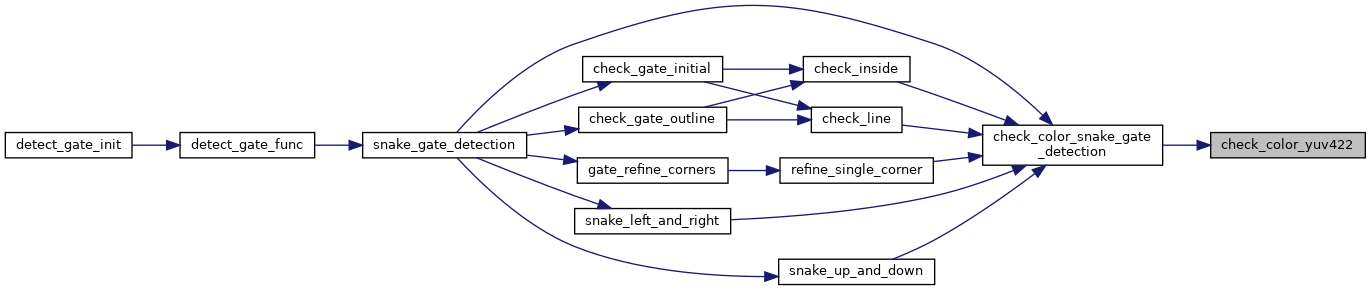
Referenced by check_color_snake_gate_detection().
Here is the caller graph for this function:This function adds padding to input image by mirroring the edge image elements.
| [in] | *input | - input image (grayscale only) |
| [out] | *output | - the output image |
| [in] | border_size | - amount of padding around image. Padding is made by reflecting image elements at the edge Example: f e d c b a | a b c d e f | f e d c b a |
Definition at line 361 of file image.c.
References image_t::buf, image_t::h, image_create(), image_t::type, and image_t::w.
Referenced by pyramid_build().
Here is the call graph for this function: Here is the caller graph for this function:Calculate the G vector of an image gradient This is used for optical flow calculation.
| [in] | *dx | The gradient in the X direction |
| [in] | *dy | The gradient in the Y direction |
| [out] | *g | The G[4] vector devided by 255 to keep in range |
Definition at line 562 of file image.c.
References image_t::buf, image_t::h, and image_t::w.
Referenced by opticFlowLK(), and opticFlowLK_flat().
Here is the caller graph for this function:Copy an image from inut to output This will only work if the formats are the same.
| [in] | *input | The input image to copy from |
| [out] | *output | The out image to copy to |
Definition at line 89 of file image.c.
References image_t::buf, image_t::buf_size, image_t::eulers, image_t::h, image_t::pprz_ts, image_t::ts, image_t::type, and image_t::w.
Referenced by calc_fast9_lukas_kanade(), cv_async_function(), and undistort_image_func().
Here is the caller graph for this function:| void image_create | ( | struct image_t * | img, |
| uint16_t | width, | ||
| uint16_t | height, | ||
| enum image_type | type | ||
| ) |
Create a new image.
| [out] | *img | The output image |
| [in] | width | The width of the image |
| [in] | height | The height of the image |
| [in] | type | The type of image (YUV422 or grayscale) |
Definition at line 43 of file image.c.
References image_t::buf, image_t::buf_size, CACHE_LINE_LENGTH, image_t::h, IMAGE_GRADIENT, IMAGE_INT16, IMAGE_JPEG, IMAGE_YUV422, type(), image_t::type, and image_t::w.
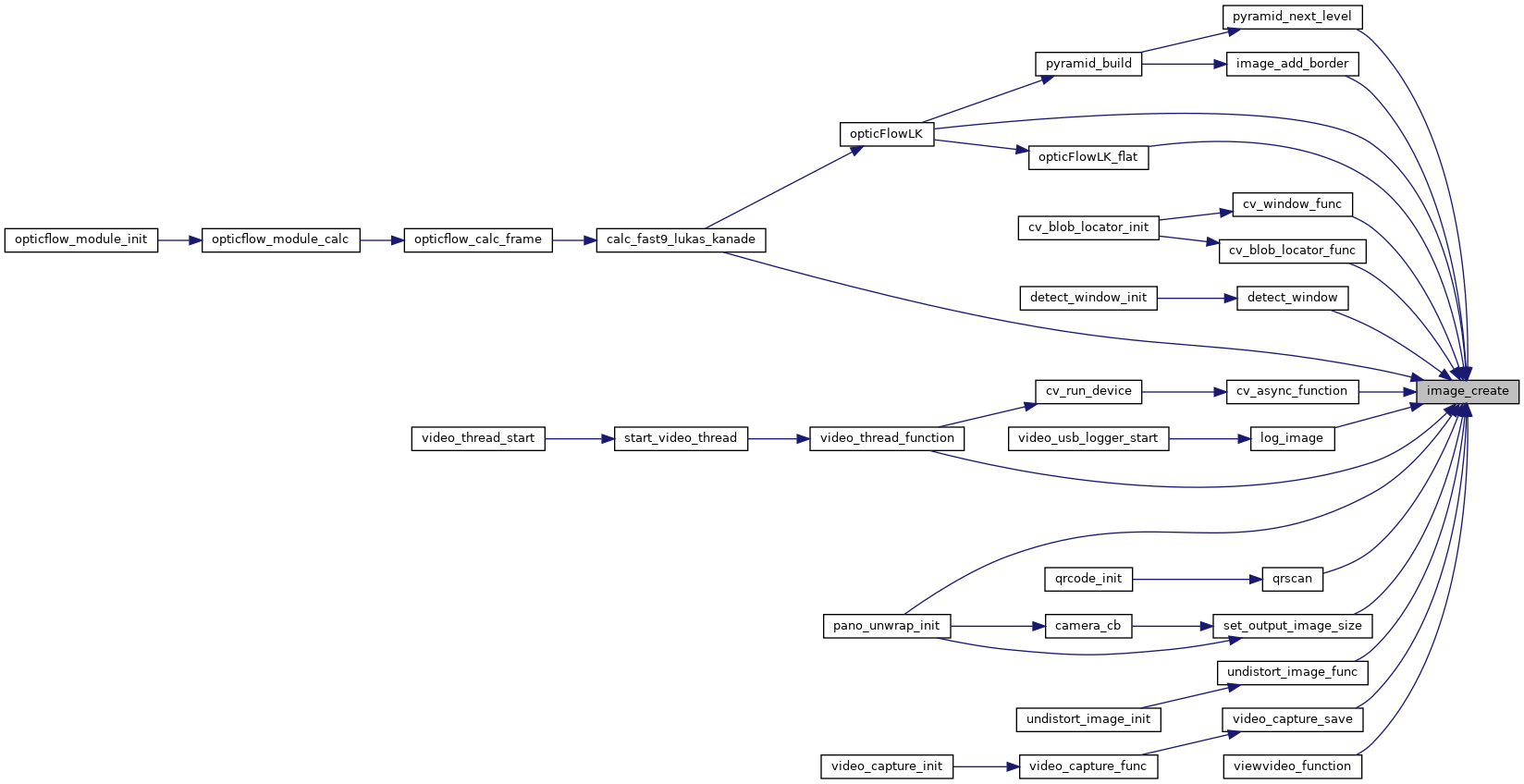
Referenced by calc_fast9_lukas_kanade(), cv_async_function(), cv_blob_locator_func(), cv_window_func(), detect_window(), image_add_border(), log_image(), opticFlowLK(), opticFlowLK_flat(), pano_unwrap_init(), pyramid_next_level(), qrscan(), set_output_image_size(), undistort_image_func(), video_capture_save(), video_thread_function(), and viewvideo_function().
Here is the call graph for this function: Here is the caller graph for this function:Calculate the difference between two images and return the error This will only work with grayscale images.
| [in] | *img_a | The image to substract from |
| [in] | *img_b | The image to substract from img_a |
| [out] | *diff | The image difference (if not needed can be NULL) |
Definition at line 594 of file image.c.
References image_t::buf, image_t::h, and image_t::w.
Referenced by opticFlowLK(), and opticFlowLK_flat().
Here is the caller graph for this function:| void image_draw_crosshair | ( | struct image_t * | img, |
| struct point_t * | loc, | ||
| const uint8_t * | color, | ||
| uint32_t | size_crosshair | ||
| ) |
Draw a cross-hair on the image.
| [in,out] | *img | The image to show the line on |
| [in] | loc | The location of the cross-hair |
| [in] | color | The line color as a [U, Y1, V, Y2] uint8_t array, or a uint8_t value pointer for grayscale images. Example colors: white = {127, 255, 127, 255}, green = {0, 127, 0, 127}; |
| [in] | size_crosshair | Actually the half size of the cross hair |
Definition at line 880 of file image.c.
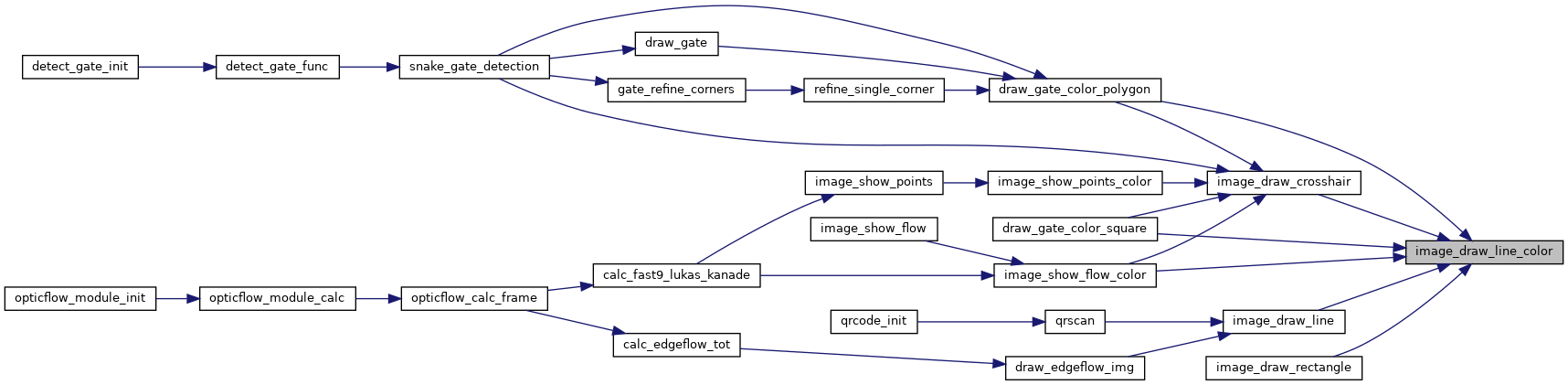
References image_t::h, image_draw_line_color(), image_t::w, point_t::x, and point_t::y.
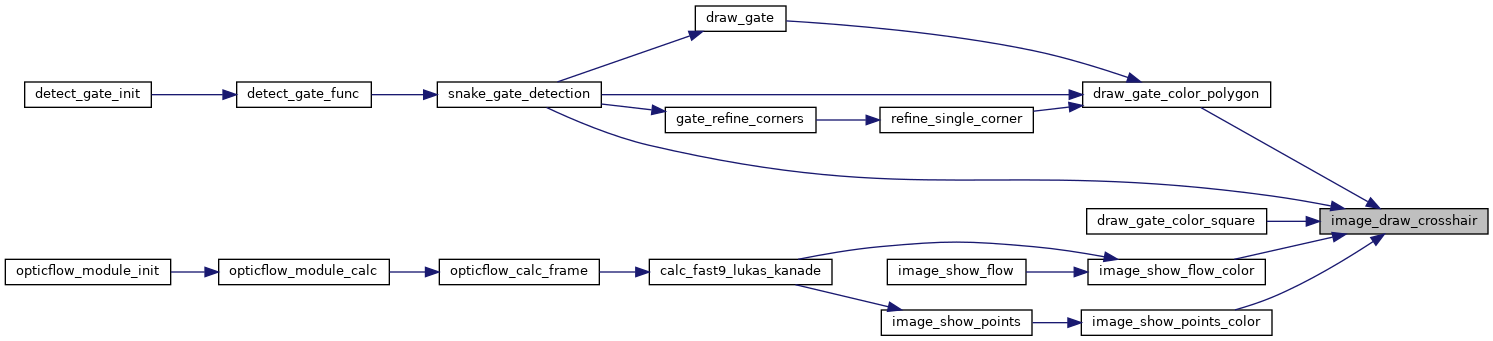
Referenced by draw_gate_color_polygon(), draw_gate_color_square(), image_show_flow_color(), image_show_points_color(), and snake_gate_detection().
Here is the call graph for this function: Here is the caller graph for this function:Draw a pink line on the image.
| [in,out] | *img | The image to show the line on |
| [in] | *from | The point to draw from |
| [in] | *to | The point to draw to |
Definition at line 906 of file image.c.
References image_draw_line_color().
Referenced by draw_edgeflow_img(), and qrscan().
Here is the call graph for this function: Here is the caller graph for this function:| void image_draw_line_color | ( | struct image_t * | img, |
| struct point_t * | from, | ||
| struct point_t * | to, | ||
| const uint8_t * | color | ||
| ) |
Draw a line on the image.
| [in,out] | *img | The image to show the line on |
| [in] | *from | The point to draw from |
| [in] | *to | The point to draw to |
| [in] | *color | The line color as a [U, Y1, V, Y2] uint8_t array, or a uint8_t value pointer for grayscale images. Example colors: white = {127, 255, 127, 255}, green = {0, 127, 0, 127}; |
Definition at line 921 of file image.c.
References image_t::buf, image_t::h, IMAGE_YUV422, image_t::type, image_t::w, point_t::x, and point_t::y.
Referenced by draw_gate_color_polygon(), draw_gate_color_square(), image_draw_crosshair(), image_draw_line(), image_draw_rectangle(), and image_show_flow_color().
Here is the caller graph for this function:| void image_draw_rectangle | ( | struct image_t * | img, |
| int | x_min, | ||
| int | x_max, | ||
| int | y_min, | ||
| int | y_max, | ||
| uint8_t * | color | ||
| ) |
Draw a rectangle on the image.
| [in,out] | *img | The image to show the line on |
| [in] | x_min | start in x |
| [in] | x_max | end of x |
| [in] | y_min | start in y |
| [in] | y_max | end of y |
| [in] | color | in [U, Y, V, Y] format |
Definition at line 838 of file image.c.
References image_draw_line_color(), point_t::x, and point_t::y.
Here is the call graph for this function:| void image_free | ( | struct image_t * | img | ) |
Free the image.
| [in] | *img | The image to free |
Definition at line 75 of file image.c.
References image_t::buf.
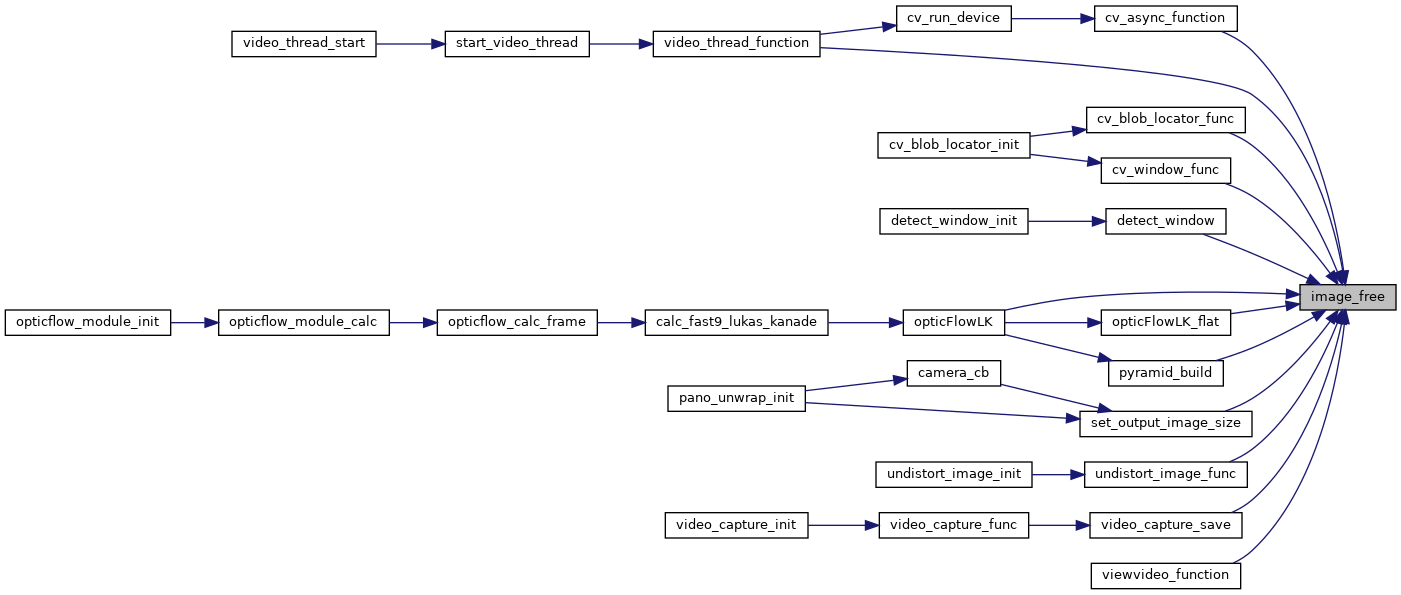
Referenced by cv_async_function(), cv_blob_locator_func(), cv_window_func(), detect_window(), opticFlowLK(), opticFlowLK_flat(), pyramid_build(), set_output_image_size(), undistort_image_func(), video_capture_save(), video_thread_function(), and viewvideo_function().
Here is the caller graph for this function:| void image_gradient_pixel | ( | struct image_t * | img, |
| struct point_t * | loc, | ||
| int | method, | ||
| int * | dx, | ||
| int * | dy | ||
| ) |
Get the gradient at a pixel location.
| [in,out] | *img | The image |
| [in] | loc | The location at which to get the gradient |
| [in] | method | 0 = {-1, 0, 1}, 1 = Sobel {-1, 0, 1; -2, 0, 2; -1, 0, 1} |
| [in] | dx | The gradient in x-direction |
| [in] | dy | The gradient in y-direction |
Definition at line 766 of file image.c.
References image_t::buf, image_t::h, IMAGE_YUV422, image_t::type, image_t::w, point_t::x, and point_t::y.
Referenced by act_fast().
Here is the caller graph for this function:Calculate the gradients using the following matrix: [0 -1 0; -1 0 1; 0 1 0].
| [in] | *input | Input grayscale image |
| [out] | *dx | Output gradient in the X direction (dx->w = input->w-2, dx->h = input->h-2) |
| [out] | *dy | Output gradient in the Y direction (dx->w = input->w-2, dx->h = input->h-2) |
Definition at line 538 of file image.c.
References image_t::buf, image_t::h, and image_t::w.
Referenced by opticFlowLK(), and opticFlowLK_flat().
Here is the caller graph for this function:Calculate the multiplication between two images and return the error This will only work with image gradients.
| [in] | *img_a | The image to multiply |
| [in] | *img_b | The image to multiply with |
| [out] | *mult | The image multiplication (if not needed can be NULL) |
Definition at line 632 of file image.c.
References image_t::buf, image_t::h, and image_t::w.
Referenced by opticFlowLK(), and opticFlowLK_flat().
Here is the caller graph for this function:| void image_show_flow | ( | struct image_t * | img, |
| struct flow_t * | vectors, | ||
| uint16_t | points_cnt, | ||
| uint8_t | subpixel_factor | ||
| ) |
Definition at line 715 of file image.c.
References image_show_flow_color().
Here is the call graph for this function:| void image_show_flow_color | ( | struct image_t * | img, |
| struct flow_t * | vectors, | ||
| uint16_t | points_cnt, | ||
| uint8_t | subpixel_factor, | ||
| const uint8_t * | color, | ||
| const uint8_t * | bad_color | ||
| ) |
Shows the flow from a specific point to a new point This works on YUV422 and Grayscale images.
| [in,out] | *img | The image to show the flow on |
| [in] | *vectors | The flow vectors to show |
| [in] | *points_cnt | The amount of points and vectors to show |
| [in] | subpixel_factor | |
| [in] | color | color for good vectors |
| [in] | bad_color | color for bad vectors |
Definition at line 732 of file image.c.
References flow_t::flow_x, flow_t::flow_y, image_draw_crosshair(), image_draw_line_color(), LARGE_FLOW_ERROR, flow_t::pos, point_t::x, and point_t::y.
Referenced by calc_fast9_lukas_kanade(), and image_show_flow().
Here is the call graph for this function: Here is the caller graph for this function:Show points in an image by coloring them through giving the pixels the maximum value.
This works with YUV422 and grayscale images
| [in,out] | *img | The image to place the points on |
| [in] | *points | The points to sohw |
| [in] | *points_cnt | The amount of points to show |
Definition at line 668 of file image.c.
References image_show_points_color().
Referenced by calc_fast9_lukas_kanade().
Here is the call graph for this function: Here is the caller graph for this function:| void image_show_points_color | ( | struct image_t * | img, |
| struct point_t * | points, | ||
| uint16_t | points_cnt, | ||
| uint8_t * | color | ||
| ) |
Show points in an image by coloring them through giving the pixels the maximum value.
This works with YUV422 and grayscale images
| [in,out] | *img | The image to place the points on |
| [in] | *points | The points to show |
| [in] | *points_cnt | The amount of points to show |
| [in] | *color | The color of the points as a [U, Y1, V, Y2] uint8_t array, or a uint8_t value pointer for grayscale images. Example colors: white = {127, 255, 127, 255}, green = {0, 127, 0, 127}; |
Definition at line 690 of file image.c.
References image_t::buf, idx, image_draw_crosshair(), IMAGE_YUV422, image_t::type, image_t::w, point_t::x, and point_t::y.
Referenced by image_show_points().
Here is the call graph for this function: Here is the caller graph for this function:| void image_subpixel_window | ( | struct image_t * | input, |
| struct image_t * | output, | ||
| struct point_t * | center, | ||
| uint32_t | subpixel_factor, | ||
| uint8_t | border_size | ||
| ) |
This outputs a subpixel window image in grayscale Currently only works with Grayscale images as input but could be upgraded to also support YUV422 images.
You can and should only ask a subpixel window of a center point that is w/2 pixels away from the edges
| [in] | *input | Input image (grayscale only) |
| [out] | *output | Window output (width and height is used to calculate the window size) |
| [in] | *center | Center point in subpixel coordinates |
| [in] | subpixel_factor | The subpixel factor per pixel |
| [in] | border_size | - amount of padding around image. Padding is made by reflecting image elements at the edge Example: f e d c b a | a b c d e f | f e d c b a |
Definition at line 480 of file image.c.
References image_t::buf, image_t::h, image_t::w, point_t::x, and point_t::y.
Referenced by opticFlowLK(), and opticFlowLK_flat().
Here is the caller graph for this function:This will switch image *a and *b This is faster as image_copy because it doesn't copy the whole image buffer.
| [in,out] | *a | The image to switch |
| [in,out] | *b | The image to switch with |
Definition at line 112 of file image.c.
References b.
Referenced by calc_fast9_lukas_kanade().
Here is the caller graph for this function:Convert an image to grayscale.
Depending on the output type the U/V bytes are removed
| [in] | *input | The input image (Needs to be YUV422) |
| [out] | *output | The output image |
Definition at line 131 of file image.c.
References image_t::buf, dest, image_t::eulers, image_t::h, IMAGE_YUV422, image_t::pprz_ts, image_t::ts, image_t::type, and image_t::w.
Referenced by calc_fast9_lukas_kanade(), cv_window_func(), and detect_window().
Here is the caller graph for this function:| uint16_t image_yuv422_colorfilt | ( | struct image_t * | input, |
| struct image_t * | output, | ||
| uint8_t | y_m, | ||
| uint8_t | y_M, | ||
| uint8_t | u_m, | ||
| uint8_t | u_M, | ||
| uint8_t | v_m, | ||
| uint8_t | v_M | ||
| ) |
Filter colors in an YUV422 image.
| [in] | *input | The input image to filter |
| [out] | *output | The filtered output image |
| [in] | y_m | The Y minimum value |
| [in] | y_M | The Y maximum value |
| [in] | u_m | The U minimum value |
| [in] | u_M | The U maximum value |
| [in] | v_m | The V minimum value |
| [in] | v_M | The V maximum value |
Definition at line 166 of file image.c.
References image_t::buf, dest, image_t::h, image_t::ts, and image_t::w.
Referenced by colorfilter_func(), detect_gate_func(), and snake_gate_detection().
Here is the caller graph for this function:| void image_yuv422_downsample | ( | struct image_t * | input, |
| struct image_t * | output, | ||
| uint8_t | downsample | ||
| ) |
Simplified high-speed low CPU downsample function without averaging downsample factor must be 1, 2, 4, 8 ...
2^X image of type UYVY expected. Only one color UV per 2 pixels
we keep the UV color of the first pixel pair and sample the intensity evenly 1-3-5-7-... or 1-5-9-...
input: u1y1 v1y2 u3y3 v3y4 u5y5 v5y6 u7y7 v7y8 ... downsample=1 u1y1 v1y2 u3y3 v3y4 u5y5 v5y6 u7y7 v7y8 ... downsample=2 u1y1v1 (skip2) y3 (skip2) u5y5v5 (skip2) y7 (skip2) ... downsample=4 u1y1v1 (skip6) y5 (skip6) ...
| [in] | *input | The input YUV422 image |
| [out] | *output | The downscaled YUV422 image |
| [in] | downsample | The downsample factor (must be downsample=2^X) |
Definition at line 311 of file image.c.
References image_t::buf, dest, image_t::h, image_t::ts, image_t::type, and image_t::w.
Referenced by viewvideo_function().
Here is the caller graph for this function:| void pyramid_build | ( | struct image_t * | input, |
| struct image_t * | output_array, | ||
| uint8_t | pyr_level, | ||
| uint16_t | border_size | ||
| ) |
This function populates given array of image_t structs with wanted number of padded pyramids based on given input.
| [in] | *input | - input image (grayscale only) |
| [out] | *output | - array of image_t structs containing image pyiramid levels. Level zero contains original image, followed by pyr_level of pyramid. |
| [in] | pyr_level | - number of pyramids to be built. If 0, original image is padded and outputed. |
| [in] | border_size | - amount of padding around image. Padding is made by reflecting image elements at the edge Example: f e d c b a | a b c d e f | f e d c b a |
Definition at line 453 of file image.c.
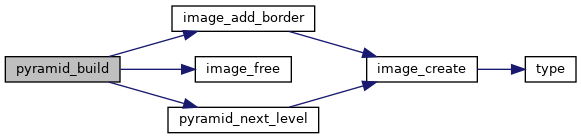
References image_add_border(), image_free(), and pyramid_next_level().
Referenced by opticFlowLK().
Here is the call graph for this function: Here is the caller graph for this function:This function takes previous padded pyramid level and outputs next level of pyramid without padding.
For calculating new pixel value 5x5 filter matrix suggested by Bouguet is used: [1/16 1/8 3/4 1/8 1/16]' x [1/16 1/8 3/4 1/8 1/16] To avoid decimal numbers, all coefficients are multiplied by 10000.
| [in] | *input | - input image (grayscale only) |
| [out] | *output | - the output image |
| [in] | border_size | - amount of padding around image. Padding is made by reflecting image elements at the edge Example: f e d c b a | a b c d e f | f e d c b a |
Definition at line 406 of file image.c.
References image_t::buf, image_t::h, image_create(), image_t::type, and image_t::w.
Referenced by pyramid_build().
Here is the call graph for this function: Here is the caller graph for this function:Sets Y,U,V for a single pixel.
| [in] | im | The input image to filter |
| [in] | x | The x-coordinate of the pixel |
| [in] | y | The y-coordinate of the pixel |
| [in] | Y | The Y-value. |
| [in] | U | The U-value. |
| [in] | V | The V value |
Definition at line 272 of file image.c.
References image_t::buf, image_t::h, image_t::w, and mesonh.mesonh_atmosphere::Y.
 1.8.17
1.8.17