|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
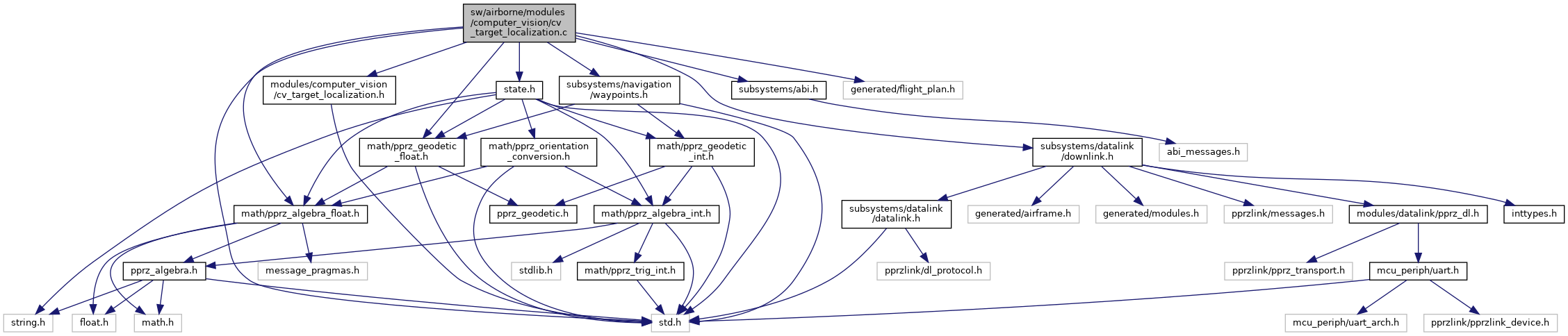
#include "modules/computer_vision/cv_target_localization.h"#include "std.h"#include "math/pprz_algebra_float.h"#include "math/pprz_geodetic_float.h"#include "state.h"#include "subsystems/abi.h"#include "subsystems/datalink/downlink.h"#include "subsystems/navigation/waypoints.h"#include "generated/flight_plan.h" Include dependency graph for cv_target_localization.c:
Include dependency graph for cv_target_localization.c:Go to the source code of this file.
Data Structures | |
| struct | target_loc_t |
Macros | |
| #define | TARGET_LOC_BODY_TO_CAM_PHI 0.f |
| #define | TARGET_LOC_BODY_TO_CAM_THETA 0.f |
| #define | TARGET_LOC_BODY_TO_CAM_PSI M_PI_2 |
| #define | TARGET_LOC_CAM_POS_X 0.f |
| #define | TARGET_LOC_CAM_POS_Y 0.f |
| #define | TARGET_LOC_CAM_POS_Z 0.f |
| #define | TARGET_LOC_PIXEL_TO_IMAGE_X (1.f / 1000.f) |
| #define | TARGET_LOC_PIXEL_TO_IMAGE_Y TARGET_LOC_PIXEL_TO_IMAGE_X |
| #define | TARGET_LOC_WP_T1_ID 1 |
| #define | TARGET_LOC_WP_T2_ID 2 |
| #define | TARGET_LOC_WP_T3_ID 3 |
| #define | TARGET_LOC_ID ABI_BROADCAST |
Functions | |
| static void | detection_cb (uint8_t sender_id UNUSED, int16_t pixel_x, int16_t pixel_y, int16_t pixel_width UNUSED, int16_t pixel_height UNUSED, int32_t quality UNUSED, int16_t extra) |
| void | target_localization_init (void) |
| void | target_localization_report (void) |
| void | cv_target_localization_report_mark (uint8_t mark) |
Variables | |
| static struct target_loc_t | target_loc |
| uint8_t | target_localization_mark |
| bool | target_localization_update_wp |
| uint8_t | target_loc_wp_tab [][2] |
| abi_event | detection_ev |
Compute georeferenced position of a target from visual detection assuming that the target is on a flat ground
Definition in file cv_target_localization.c.
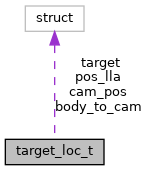
| struct target_loc_t |
Definition at line 80 of file cv_target_localization.c.
Collaboration diagram for target_loc_t:| Data Fields | ||
|---|---|---|
| struct FloatRMat | body_to_cam | Body to camera rotation. |
| struct FloatVect3 | cam_pos | Position of camera in body frame. |
| struct LlaCoor_f | pos_lla | Target global position in LLA. |
| int16_t | px | Target in camera frame. |
| int16_t | py | Target in camera frame. |
| struct NedCoor_f | target | Target position in LTP-NED frame. |
| uint8_t | type | Type of target. |
| bool | valid | True if a target have been seen. |
| #define TARGET_LOC_BODY_TO_CAM_PHI 0.f |
Definition at line 45 of file cv_target_localization.c.
| #define TARGET_LOC_BODY_TO_CAM_PSI M_PI_2 |
Definition at line 53 of file cv_target_localization.c.
| #define TARGET_LOC_BODY_TO_CAM_THETA 0.f |
Definition at line 49 of file cv_target_localization.c.
| #define TARGET_LOC_CAM_POS_X 0.f |
Definition at line 57 of file cv_target_localization.c.
| #define TARGET_LOC_CAM_POS_Y 0.f |
Definition at line 61 of file cv_target_localization.c.
| #define TARGET_LOC_CAM_POS_Z 0.f |
Definition at line 65 of file cv_target_localization.c.
| #define TARGET_LOC_ID ABI_BROADCAST |
Definition at line 128 of file cv_target_localization.c.
Definition at line 71 of file cv_target_localization.c.
| #define TARGET_LOC_PIXEL_TO_IMAGE_Y TARGET_LOC_PIXEL_TO_IMAGE_X |
Definition at line 76 of file cv_target_localization.c.
| #define TARGET_LOC_WP_T1_ID 1 |
Definition at line 105 of file cv_target_localization.c.
| #define TARGET_LOC_WP_T2_ID 2 |
Definition at line 108 of file cv_target_localization.c.
| #define TARGET_LOC_WP_T3_ID 3 |
Definition at line 111 of file cv_target_localization.c.
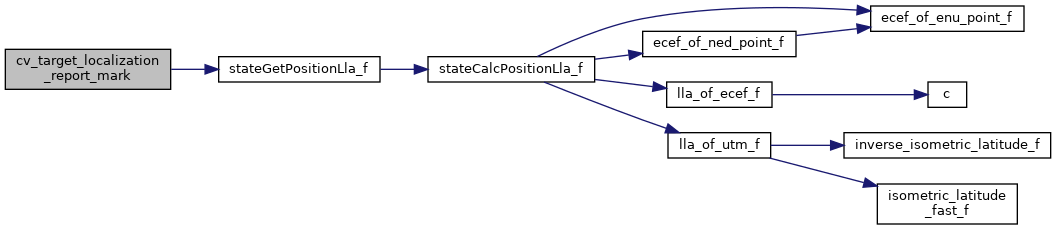
| void cv_target_localization_report_mark | ( | uint8_t | mark | ) |
Definition at line 232 of file cv_target_localization.c.
References DefaultChannel, DefaultDevice, LlaCoor_f::lat, LlaCoor_f::lon, stateGetPositionLla_f(), and target_localization_mark.
Here is the call graph for this function:
|
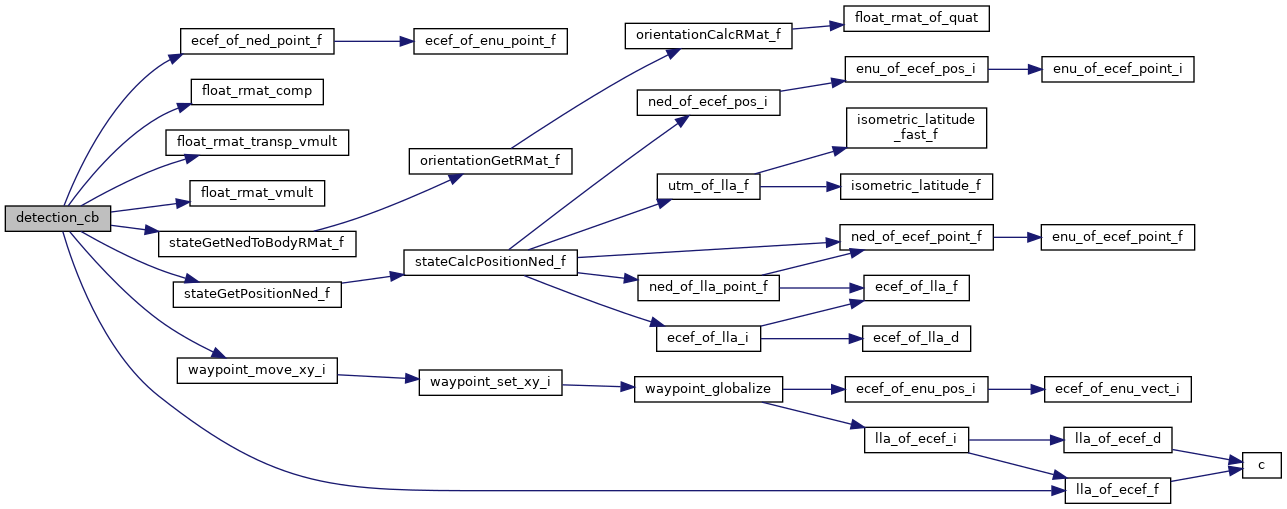
static |
Definition at line 133 of file cv_target_localization.c.
References target_loc_t::body_to_cam, target_loc_t::cam_pos, ecef_of_ned_point_f(), float_rmat_comp(), float_rmat_transp_vmult(), float_rmat_vmult(), lla_of_ecef_f(), State::ned_origin_f, POS_BFP_OF_REAL, target_loc_t::pos_lla, target_loc_t::px, target_loc_t::py, scale, state, stateGetNedToBodyRMat_f(), stateGetPositionNed_f(), target_loc_t::target, target_loc, TARGET_LOC_PIXEL_TO_IMAGE_X, TARGET_LOC_PIXEL_TO_IMAGE_Y, target_loc_wp_tab, target_localization_update_wp, target_loc_t::type, target_loc_t::valid, VECT3_ADD, VECT3_SUM_SCALED, waypoint_move_xy_i(), FloatVect3::x, NedCoor_f::x, NedCoor_f::y, and FloatVect3::z.
Referenced by target_localization_init().
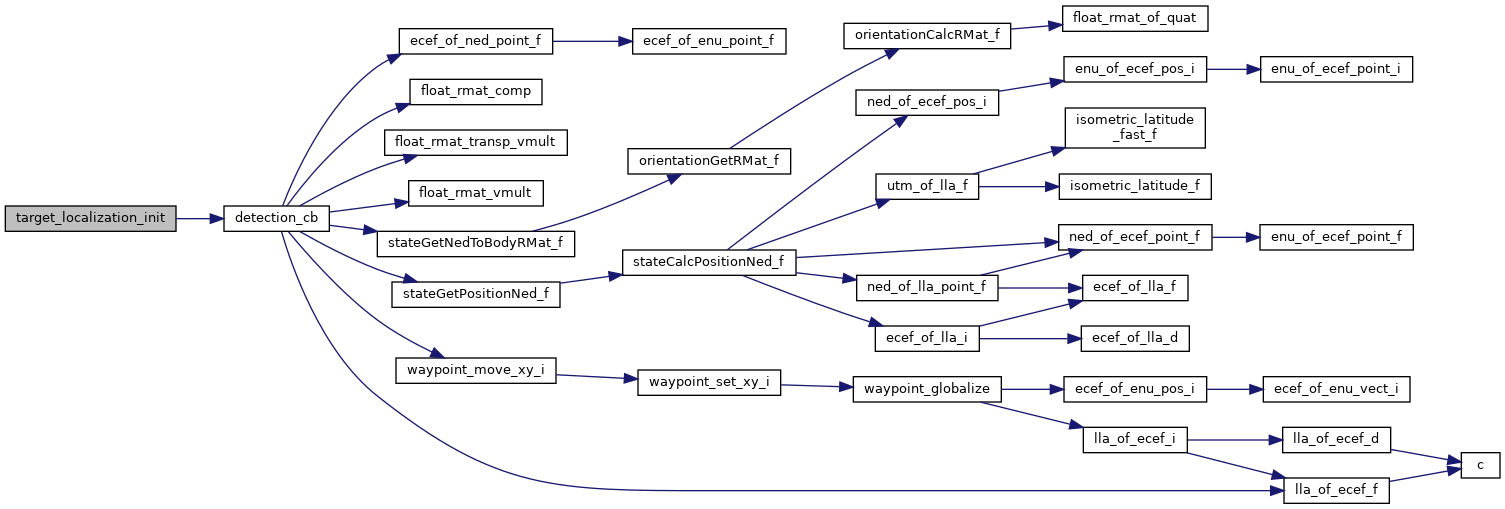
Here is the call graph for this function: Here is the caller graph for this function:| void target_localization_init | ( | void | ) |
Definition at line 190 of file cv_target_localization.c.
References target_loc_t::body_to_cam, target_loc_t::cam_pos, detection_cb(), detection_ev, float_rmat_of_eulers, FLOAT_VECT3_ZERO, target_loc_t::px, target_loc_t::py, target_loc_t::target, target_loc, TARGET_LOC_BODY_TO_CAM_PHI, TARGET_LOC_BODY_TO_CAM_PSI, TARGET_LOC_BODY_TO_CAM_THETA, TARGET_LOC_CAM_POS_X, TARGET_LOC_CAM_POS_Y, TARGET_LOC_CAM_POS_Z, TARGET_LOC_ID, target_localization_mark, target_localization_update_wp, target_loc_t::valid, and VECT3_ASSIGN.
Here is the call graph for this function:| void target_localization_report | ( | void | ) |
Definition at line 218 of file cv_target_localization.c.
References DefaultChannel, DefaultDevice, LlaCoor_f::lat, LlaCoor_f::lon, target_loc_t::pos_lla, target_loc, target_loc_t::type, and target_loc_t::valid.
| abi_event detection_ev |
Definition at line 131 of file cv_target_localization.c.
Referenced by target_localization_init().
|
static |
Definition at line 94 of file cv_target_localization.c.
Referenced by detection_cb(), target_localization_init(), and target_localization_report().
| uint8_t target_loc_wp_tab[][2] |
Definition at line 113 of file cv_target_localization.c.
Referenced by detection_cb().
| uint8_t target_localization_mark |
Definition at line 99 of file cv_target_localization.c.
Referenced by cv_target_localization_report_mark(), and target_localization_init().
| bool target_localization_update_wp |
Definition at line 101 of file cv_target_localization.c.
Referenced by detection_cb(), and target_localization_init().
 1.8.17
1.8.17