|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
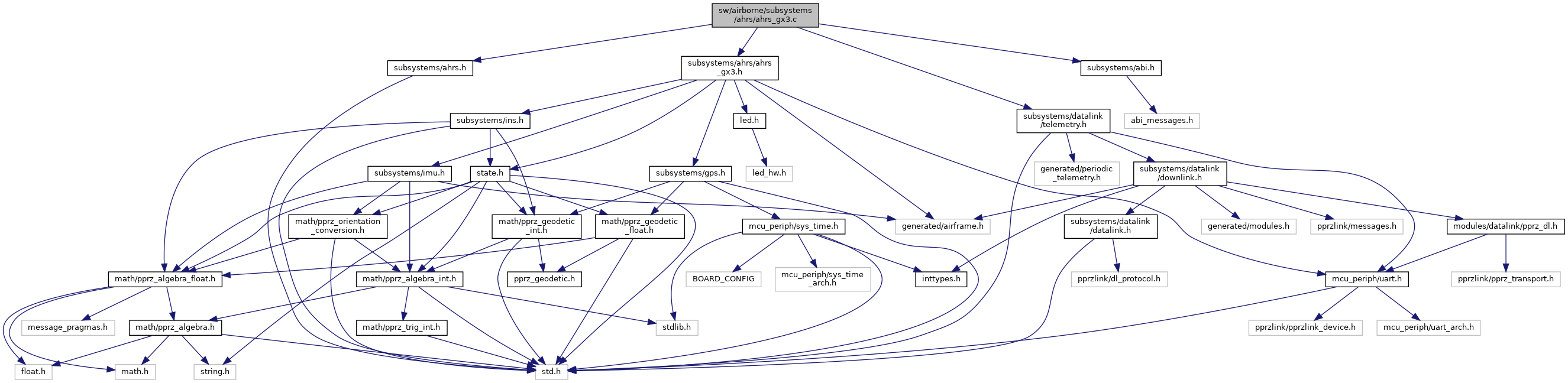
#include "subsystems/ahrs/ahrs_gx3.h"#include "subsystems/ahrs.h"#include "subsystems/abi.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for ahrs_gx3.c:
Include dependency graph for ahrs_gx3.c:Go to the source code of this file.
Macros | |
| #define | GX3_CHKSM(_ubx_payload) (uint16_t)((uint16_t)(*((uint8_t*)_ubx_payload+66+1))|(uint16_t)(*((uint8_t*)_ubx_payload+66+0))<<8) |
Functions | |
| static bool | gx3_verify_chk (volatile uint8_t *buff_add) |
| static float | bef (volatile uint8_t *c) |
| void | ahrs_gx3_align (void) |
| static void | send_gx3 (struct transport_tx *trans, struct link_device *dev) |
| void | imu_gx3_init (void) |
| void | imu_gx3_periodic (void) |
| void | gx3_packet_read_message (void) |
| void | gx3_packet_parse (uint8_t c) |
| void | ahrs_gx3_init (void) |
| void | ahrs_gx3_register (void) |
| void | imu_scale_gyro (struct Imu *_imu) |
| void | imu_scale_accel (struct Imu *_imu) |
| void | imu_scale_mag (struct Imu *_imu) |
| void | ahrs_gx3_publish_imu (void) |
| static void | ReadGX3Buffer (void) |
| void | imu_gx3_event (void) |
Variables | |
| struct AhrsGX3 | ahrs_gx3 |
| Axis definition: X axis pointing forward, Y axis pointing to the right and Z axis pointing down. More... | |
Driver for Microstrain GX3 IMU/AHRS subsystem
Takes care of configuration of the IMU, communication and parsing the received packets. See GX3 datasheet for configuration options.
Definition in file ahrs_gx3.c.
| #define GX3_CHKSM | ( | _ubx_payload | ) | (uint16_t)((uint16_t)(*((uint8_t*)_ubx_payload+66+1))|(uint16_t)(*((uint8_t*)_ubx_payload+66+0))<<8) |
Definition at line 40 of file ahrs_gx3.c.
| void ahrs_gx3_align | ( | void | ) |
Definition at line 76 of file ahrs_gx3.c.
References ahrs_gx3, AhrsGX3::is_aligned, and uart_put_byte().
Referenced by imu_gx3_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_gx3_init | ( | void | ) |
Definition at line 328 of file ahrs_gx3.c.
References ahrs_gx3, Imu::body_to_imu, imu, AhrsGX3::is_aligned, AhrsGX3::ltp_to_imu_quat, AhrsGX3::mag_offset, orientationGetQuat_f(), and QUAT_COPY.
Referenced by ahrs_gx3_register().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_gx3_publish_imu | ( | void | ) |
Definition at line 354 of file ahrs_gx3.c.
References Imu::accel, get_sys_time_usec(), Imu::gyro, imu, IMU_GX3_ID, and Imu::mag.
Referenced by imu_gx3_event().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_gx3_register | ( | void | ) |
Definition at line 341 of file ahrs_gx3.c.
References ahrs_gx3_init(), and ahrs_register_impl().
Here is the call graph for this function:
|
inlinestatic |
Definition at line 54 of file ahrs_gx3.c.
Referenced by gx3_packet_read_message().
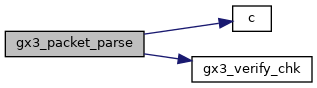
Here is the call graph for this function: Here is the caller graph for this function:| void gx3_packet_parse | ( | uint8_t | c | ) |
Definition at line 295 of file ahrs_gx3.c.
References ahrs_gx3, c(), GX3Packet::chksm_error, GX3_HEADER, GX3_MSG_LEN, gx3_verify_chk(), GX3PacketReading, GX3PacketWaiting, GX3Packet::hdr_error, GX3Packet::msg_available, GX3Packet::msg_buf, GX3Packet::msg_idx, AhrsGX3::packet, and GX3Packet::status.
Referenced by ReadGX3Buffer().
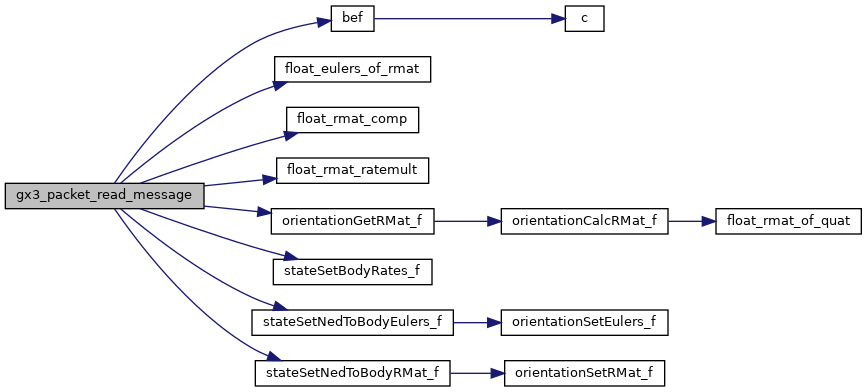
Here is the call graph for this function: Here is the caller graph for this function:| void gx3_packet_read_message | ( | void | ) |
Definition at line 227 of file ahrs_gx3.c.
References Imu::accel, AhrsGX3::accel, ACCELS_BFP_OF_REAL, ahrs_gx3, bef(), Imu::body_to_imu, AhrsGX3::chksm, GpsState::course, float_eulers_of_rmat(), float_rmat_comp(), float_rmat_ratemult(), AhrsGX3::freq, gps, GX3_CHKSM, Imu::gyro, imu, AhrsGX3::ltime, FloatRMat::m, AhrsGX3::mag_offset, GX3Packet::msg_buf, orientationGetRMat_f(), FloatRates::p, AhrsGX3::packet, FloatEulers::psi, FloatRates::q, FloatRates::r, AhrsGX3::rate, RATES_BFP_OF_REAL, AhrsGX3::rmat, stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), stateSetNedToBodyRMat_f(), AhrsGX3::time, VECT3_SMUL, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by imu_gx3_event().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 66 of file ahrs_gx3.c.
References chk_calc, and GX3_MSG_LEN.
Referenced by gx3_packet_parse().
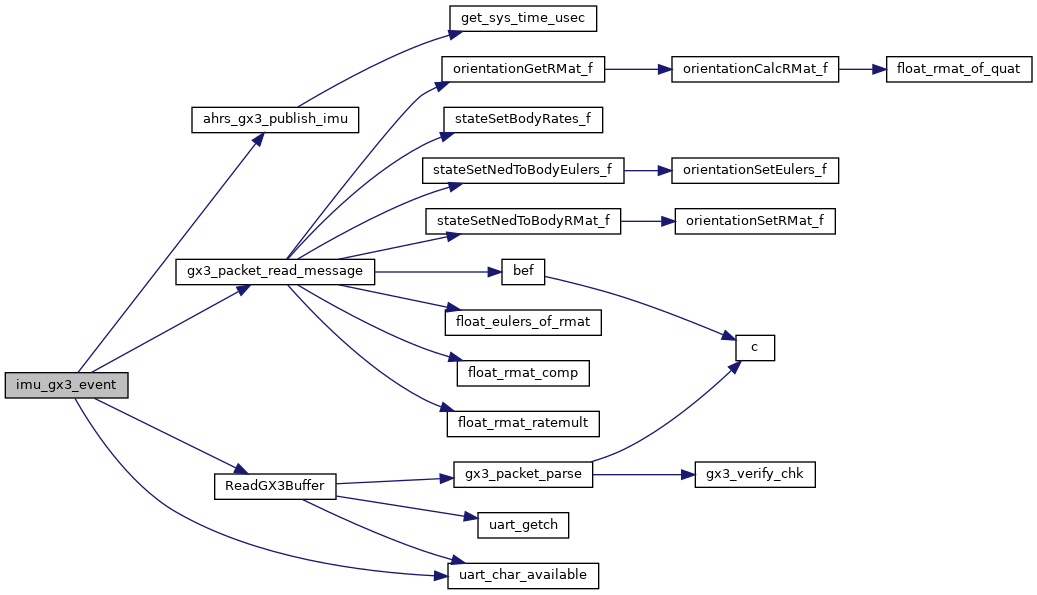
Here is the caller graph for this function:| void imu_gx3_event | ( | void | ) |
Definition at line 369 of file ahrs_gx3.c.
References ahrs_gx3, ahrs_gx3_publish_imu(), gx3_packet_read_message(), GX3Packet::msg_available, AhrsGX3::packet, ReadGX3Buffer(), and uart_char_available().
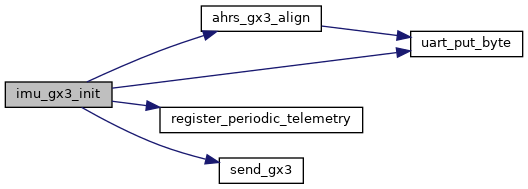
Here is the call graph for this function:| void imu_gx3_init | ( | void | ) |
Definition at line 107 of file ahrs_gx3.c.
References ahrs_gx3, ahrs_gx3_align(), GX3Packet::chksm_error, DefaultPeriodic, GX3PacketWaiting, GX3Packet::hdr_error, IMU_GX3_LONG_DELAY, AhrsGX3::is_aligned, GX3Packet::msg_available, GX3Packet::msg_idx, AhrsGX3::packet, register_periodic_telemetry(), send_gx3(), GX3Packet::status, and uart_put_byte().
Here is the call graph for this function:| void imu_gx3_periodic | ( | void | ) |
Definition at line 219 of file ahrs_gx3.c.
| void imu_scale_accel | ( | struct Imu * | _imu | ) |
Definition at line 351 of file ahrs_gx3.c.
| void imu_scale_gyro | ( | struct Imu * | _imu | ) |
Definition at line 350 of file ahrs_gx3.c.
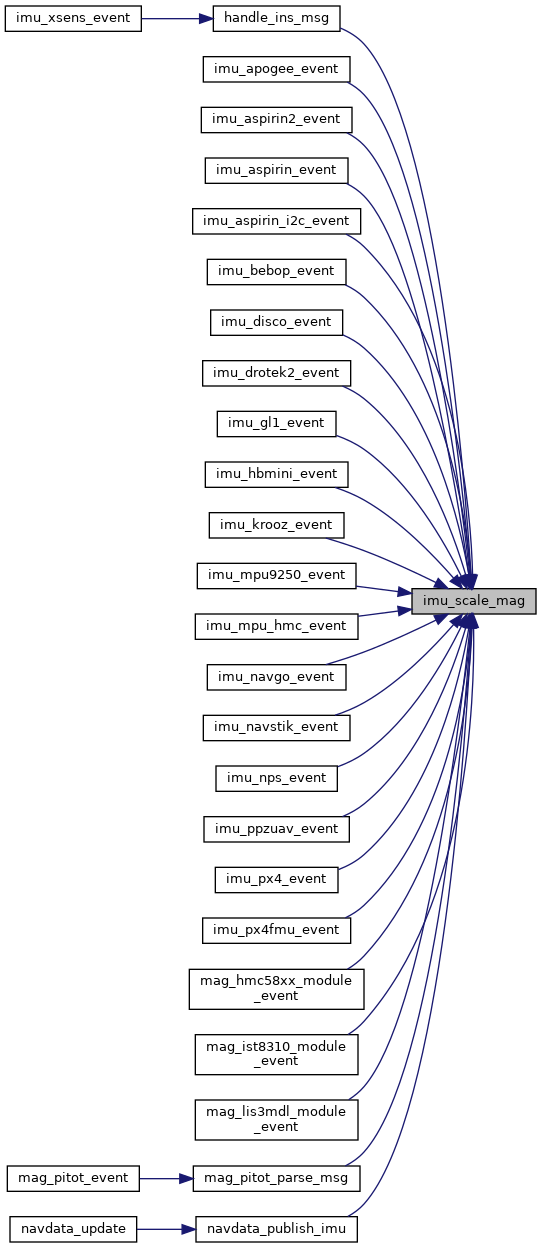
| void imu_scale_mag | ( | struct Imu * | _imu | ) |
Definition at line 352 of file ahrs_gx3.c.
Referenced by handle_ins_msg(), imu_apogee_event(), imu_aspirin2_event(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_bebop_event(), imu_disco_event(), imu_drotek2_event(), imu_gl1_event(), imu_hbmini_event(), imu_krooz_event(), imu_mpu9250_event(), imu_mpu_hmc_event(), imu_navgo_event(), imu_navstik_event(), imu_nps_event(), imu_ppzuav_event(), imu_px4_event(), imu_px4fmu_event(), mag_hmc58xx_module_event(), mag_ist8310_module_event(), mag_lis3mdl_module_event(), mag_pitot_parse_msg(), and navdata_publish_imu().
Here is the caller graph for this function:
|
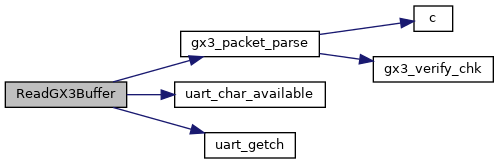
inlinestatic |
Definition at line 362 of file ahrs_gx3.c.
References ahrs_gx3, gx3_packet_parse(), GX3Packet::msg_available, AhrsGX3::packet, uart_char_available(), and uart_getch().
Referenced by imu_gx3_event().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 93 of file ahrs_gx3.c.
References ahrs_gx3, AhrsGX3::chksm, GX3Packet::chksm_error, dev, AhrsGX3::freq, GX3Packet::hdr_error, and AhrsGX3::packet.
Referenced by imu_gx3_init().
Here is the caller graph for this function:| struct AhrsGX3 ahrs_gx3 |
Axis definition: X axis pointing forward, Y axis pointing to the right and Z axis pointing down.
Positive pitch : nose up Positive roll : right wing down Positive yaw : clockwise
Definition at line 48 of file ahrs_gx3.c.
Referenced by ahrs_gx3_align(), ahrs_gx3_init(), gx3_packet_parse(), gx3_packet_read_message(), imu_gx3_event(), imu_gx3_init(), ReadGX3Buffer(), and send_gx3().
 1.8.17
1.8.17