|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
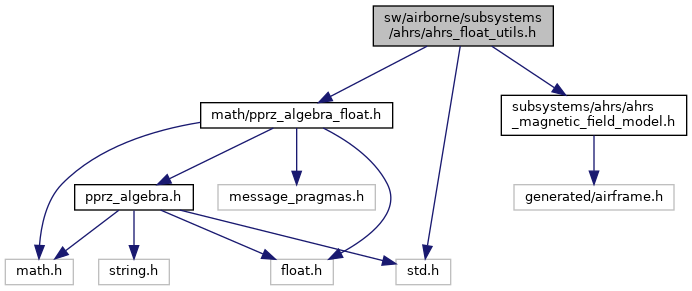
#include "math/pprz_algebra_float.h"#include "subsystems/ahrs/ahrs_magnetic_field_model.h"#include "std.h" Include dependency graph for ahrs_float_utils.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ahrs_float_utils.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| static void | ahrs_float_get_euler_from_accel_mag (struct FloatEulers *e, struct FloatVect3 *accel, struct FloatVect3 *mag) |
| Computer orientation in euler angles from accel and mag This is not working when the IMU is upside-down, then use the quaternion based function. More... | |
| static void | ahrs_float_get_quat_from_accel (struct FloatQuat *q, struct FloatVect3 *accel) |
| Compute a quaternion representing roll and pitch from an accelerometer measurement. More... | |
| static void | ahrs_float_get_quat_from_accel_mag (struct FloatQuat *q, struct FloatVect3 *accel, struct FloatVect3 *mag) |
Utility functions for floating point AHRS implementations.
Definition in file ahrs_float_utils.h.
|
inlinestatic |
Computer orientation in euler angles from accel and mag This is not working when the IMU is upside-down, then use the quaternion based function.
Definition at line 40 of file ahrs_float_utils.h.
References EULERS_ASSIGN, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
|
inlinestatic |
Compute a quaternion representing roll and pitch from an accelerometer measurement.
Definition at line 61 of file ahrs_float_utils.h.
References float_quat_normalize(), float_vect3_normalize(), FloatQuat::qi, QUAT_ASSIGN, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
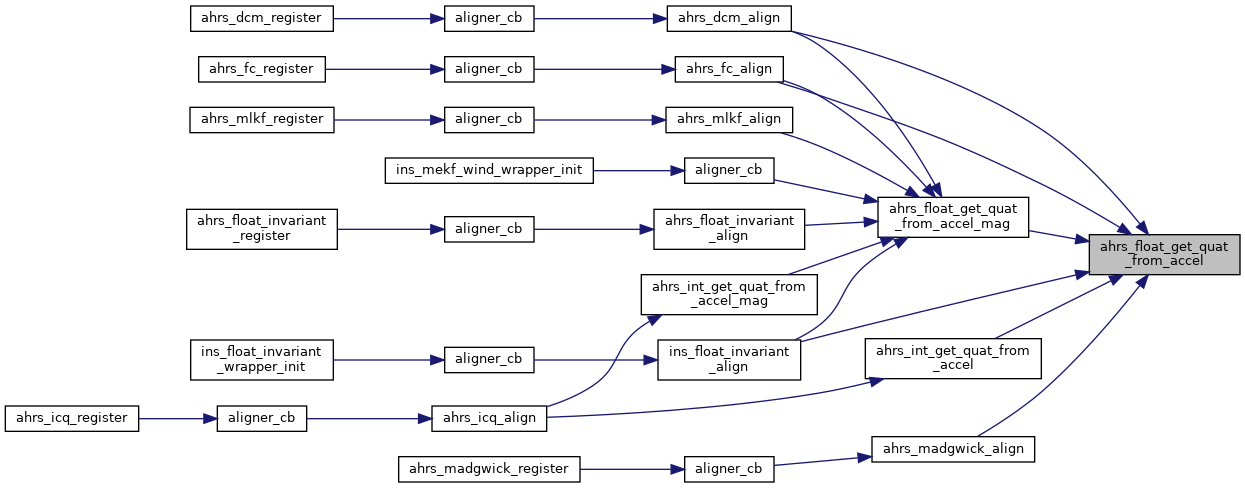
Referenced by ahrs_dcm_align(), ahrs_fc_align(), ahrs_float_get_quat_from_accel_mag(), ahrs_int_get_quat_from_accel(), ahrs_madgwick_align(), and ins_float_invariant_align().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 85 of file ahrs_float_utils.h.
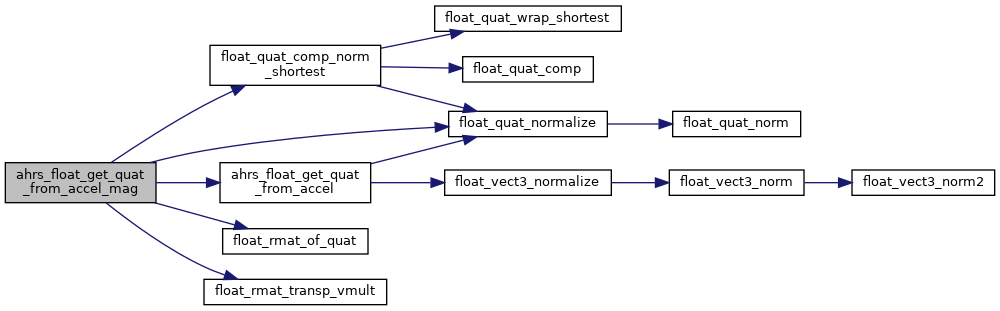
References ahrs_float_get_quat_from_accel(), float_quat_comp_norm_shortest(), float_quat_normalize(), float_rmat_of_quat(), float_rmat_transp_vmult(), FloatQuat::qi, QUAT_ASSIGN, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, SQUARE, FloatVect3::x, and FloatVect3::y.
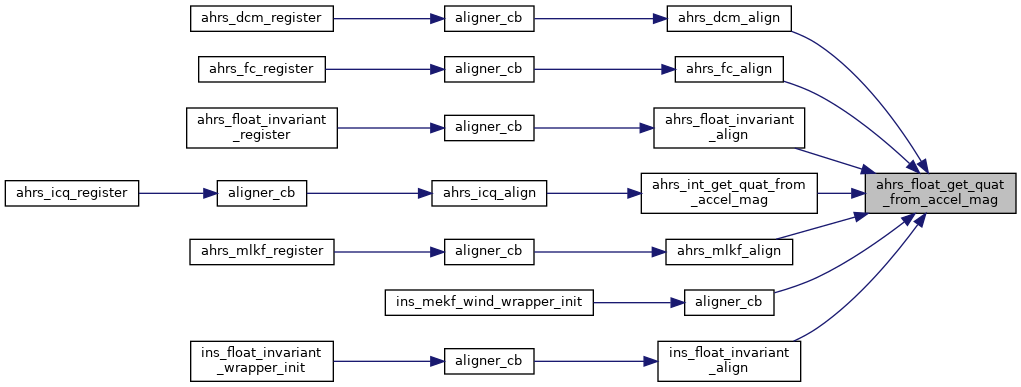
Referenced by ahrs_dcm_align(), ahrs_fc_align(), ahrs_float_invariant_align(), ahrs_int_get_quat_from_accel_mag(), ahrs_mlkf_align(), aligner_cb(), and ins_float_invariant_align().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17