|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Horizontal guidance for rotorcrafts. More...
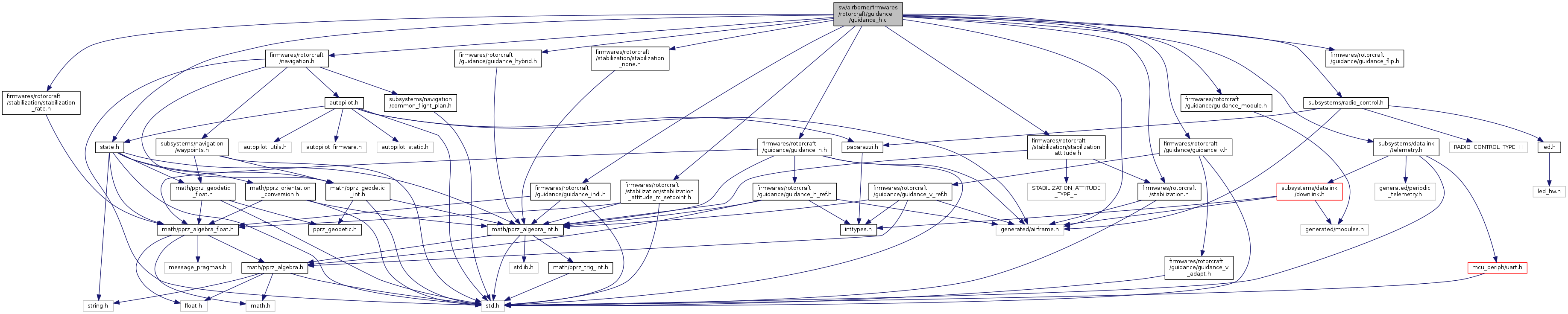
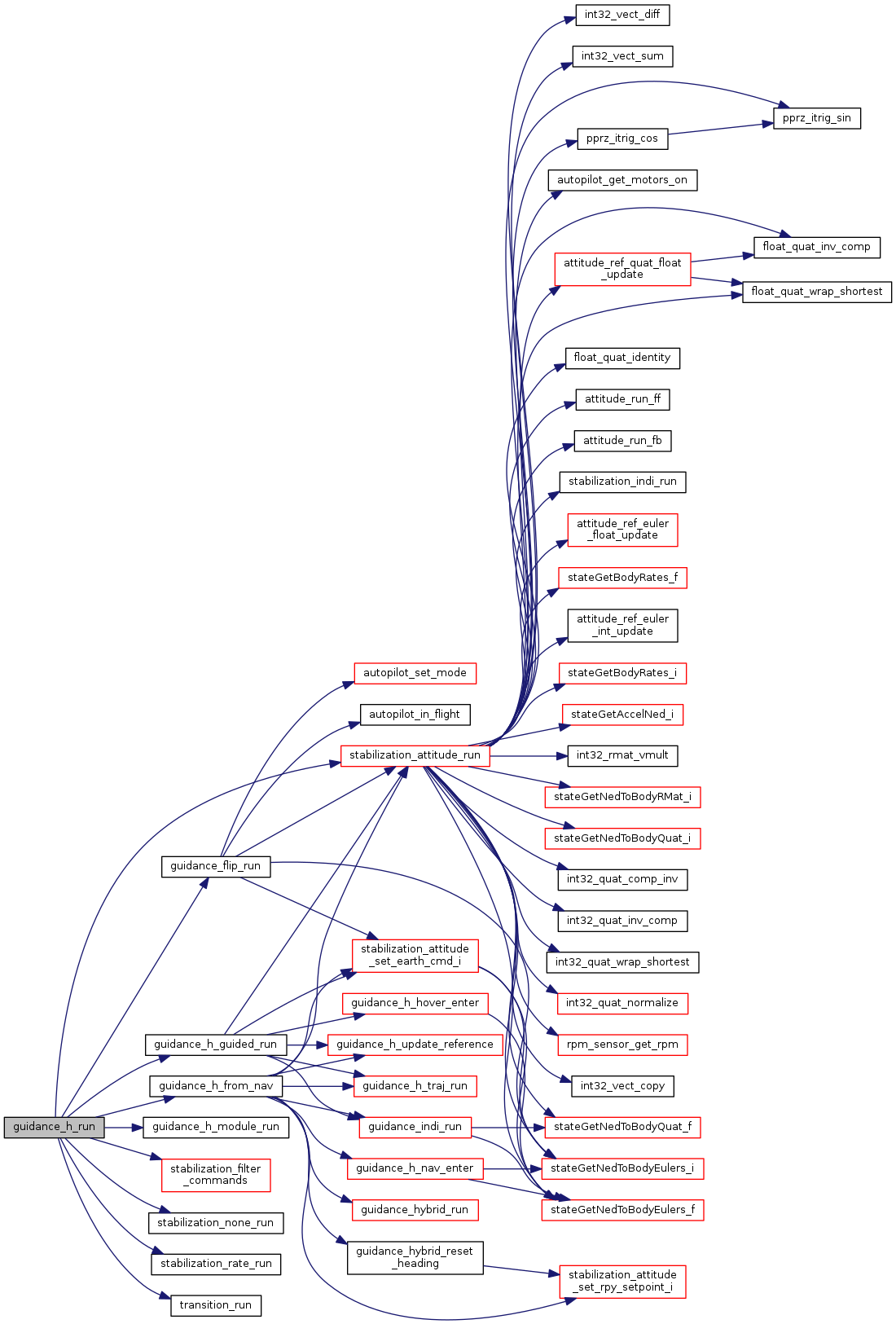
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_hybrid.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "firmwares/rotorcraft/guidance/guidance_flip.h"#include "firmwares/rotorcraft/guidance/guidance_indi.h"#include "firmwares/rotorcraft/guidance/guidance_module.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "firmwares/rotorcraft/navigation.h"#include "subsystems/radio_control.h"#include "firmwares/rotorcraft/stabilization/stabilization_none.h"#include "firmwares/rotorcraft/stabilization/stabilization_rate.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "state.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for guidance_h.c:
Include dependency graph for guidance_h.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_H_AGAIN 0 |
| #define | GUIDANCE_H_VGAIN 0 |
| #define | GUIDANCE_H_MAX_BANK RadOfDeg(20) |
| #define | GUIDANCE_H_APPROX_FORCE_BY_THRUST FALSE |
| #define | GUIDANCE_INDI FALSE |
| #define | MAX_POS_ERR POS_BFP_OF_REAL(16.) |
| #define | MAX_SPEED_ERR SPEED_BFP_OF_REAL(16.) |
| #define | GUIDANCE_H_THRUST_CMD_FILTER 10 |
| #define | GH_GAIN_SCALE 2 |
Functions | |
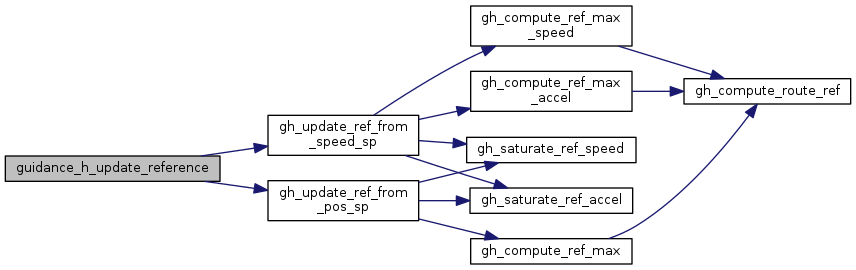
| static void | guidance_h_update_reference (void) |
| static void | guidance_h_traj_run (bool in_flight) |
| static void | transition_run (bool to_forward) |
| static void | read_rc_setpoint_speed_i (struct Int32Vect2 *speed_sp, bool in_flight) |
| read speed setpoint from RC More... | |
| static void | send_gh (struct transport_tx *trans, struct link_device *dev) |
| static void | send_hover_loop (struct transport_tx *trans, struct link_device *dev) |
| static void | send_href (struct transport_tx *trans, struct link_device *dev) |
| static void | send_tune_hover (struct transport_tx *trans, struct link_device *dev) |
| void | guidance_h_init (void) |
| static void | reset_guidance_reference_from_current_position (void) |
| void | guidance_h_mode_changed (uint8_t new_mode) |
| void | guidance_h_read_rc (bool in_flight) |
| void | guidance_h_run (bool in_flight) |
| void | guidance_h_hover_enter (void) |
| void | guidance_h_nav_enter (void) |
| void | guidance_h_from_nav (bool in_flight) |
| Set horizontal guidance from NAV and run control loop. More... | |
| void | guidance_h_set_igain (uint32_t igain) |
| void | guidance_h_guided_run (bool in_flight) |
| Run GUIDED mode control. More... | |
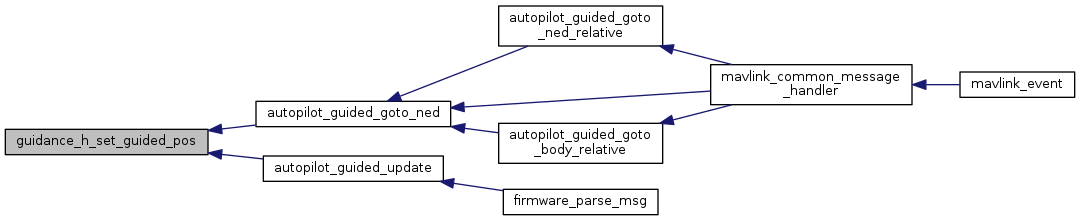
| bool | guidance_h_set_guided_pos (float x, float y) |
| Set horizontal position setpoint in GUIDED mode. More... | |
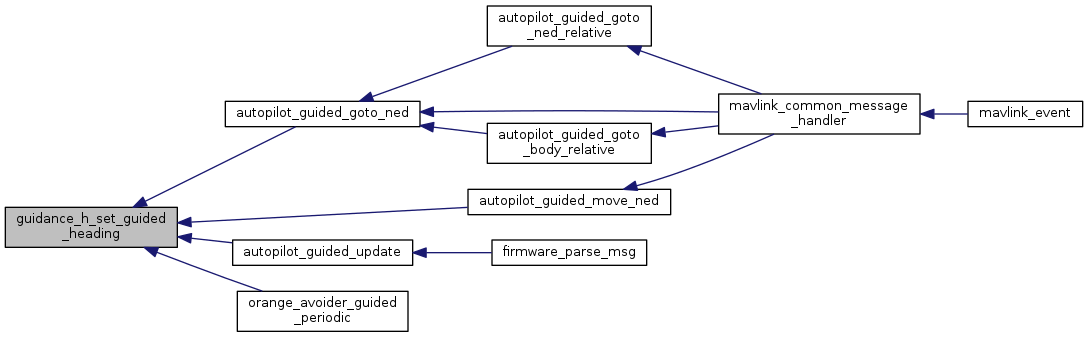
| bool | guidance_h_set_guided_heading (float heading) |
| Set heading setpoint in GUIDED mode. More... | |
| bool | guidance_h_set_guided_body_vel (float vx, float vy) |
| Set body relative horizontal velocity setpoint in GUIDED mode. More... | |
| bool | guidance_h_set_guided_vel (float vx, float vy) |
| Set horizontal velocity setpoint in GUIDED mode. More... | |
| bool | guidance_h_set_guided_heading_rate (float rate) |
| Set heading rate setpoint in GUIDED mode. More... | |
| const struct Int32Vect2 * | guidance_h_get_pos_err (void) |
| Gets the position error. More... | |
Variables | |
| struct HorizontalGuidance | guidance_h |
| int32_t | transition_percentage |
| struct Int32Vect2 | guidance_h_pos_err |
| struct Int32Vect2 | guidance_h_speed_err |
| struct Int32Vect2 | guidance_h_trim_att_integrator |
| struct Int32Vect2 | guidance_h_cmd_earth |
| horizontal guidance command. More... | |
Horizontal guidance for rotorcrafts.
Definition in file guidance_h.c.
| #define GH_GAIN_SCALE 2 |
Definition at line 459 of file guidance_h.c.
Referenced by guidance_h_traj_run().
| #define GUIDANCE_H_AGAIN 0 |
Definition at line 49 of file guidance_h.c.
Referenced by guidance_h_init().
| #define GUIDANCE_H_APPROX_FORCE_BY_THRUST FALSE |
Definition at line 73 of file guidance_h.c.
Referenced by guidance_h_init().
| #define GUIDANCE_H_MAX_BANK RadOfDeg(20) |
Definition at line 66 of file guidance_h.c.
Referenced by computeOptiTrack(), and guidance_h_traj_run().
| #define GUIDANCE_H_THRUST_CMD_FILTER 10 |
Definition at line 454 of file guidance_h.c.
Referenced by guidance_h_traj_run().
| #define GUIDANCE_H_VGAIN 0 |
Definition at line 53 of file guidance_h.c.
Referenced by guidance_h_init().
| #define GUIDANCE_INDI FALSE |
Definition at line 77 of file guidance_h.c.
| #define MAX_POS_ERR POS_BFP_OF_REAL(16.) |
Definition at line 450 of file guidance_h.c.
Referenced by guidance_h_traj_run().
| #define MAX_SPEED_ERR SPEED_BFP_OF_REAL(16.) |
Definition at line 451 of file guidance_h.c.
Referenced by guidance_h_traj_run().
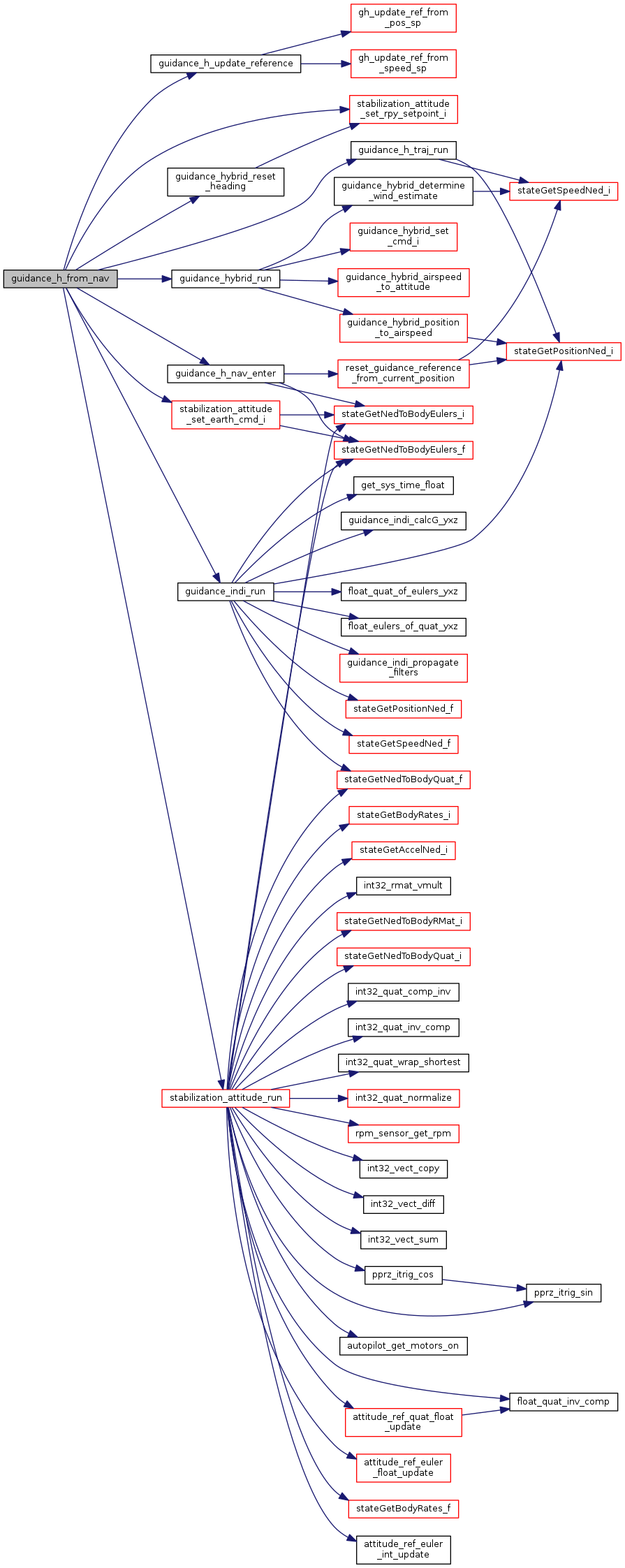
| void guidance_h_from_nav | ( | bool | in_flight | ) |
Set horizontal guidance from NAV and run control loop.
Definition at line 569 of file guidance_h.c.
References ANGLE_BFP_OF_REAL, ANGLE_FLOAT_OF_BFP, FLOAT_ANGLE_NORMALIZE, guidance_h, guidance_h_cmd_earth, guidance_h_nav_enter(), guidance_h_traj_run(), guidance_h_update_reference(), guidance_hybrid_reset_heading(), guidance_hybrid_run(), guidance_indi_run(), HorizontalGuidanceSetpoint::heading, horizontal_mode, HORIZONTAL_MODE_ATTITUDE, HORIZONTAL_MODE_MANUAL, INT32_VECT2_NED_OF_ENU, nav_cmd_pitch, nav_cmd_roll, nav_cmd_yaw, nav_heading, nav_pitch, nav_roll, navigation_carrot, navigation_target, Int32Eulers::phi, HorizontalGuidanceSetpoint::pos, Int32Eulers::psi, HorizontalGuidance::sp, stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_rpy_setpoint_i(), stabilization_cmd, and Int32Eulers::theta.
Referenced by guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:| const struct Int32Vect2* guidance_h_get_pos_err | ( | void | ) |
Gets the position error.
| none. |
Definition at line 748 of file guidance_h.c.
References guidance_h_pos_err.
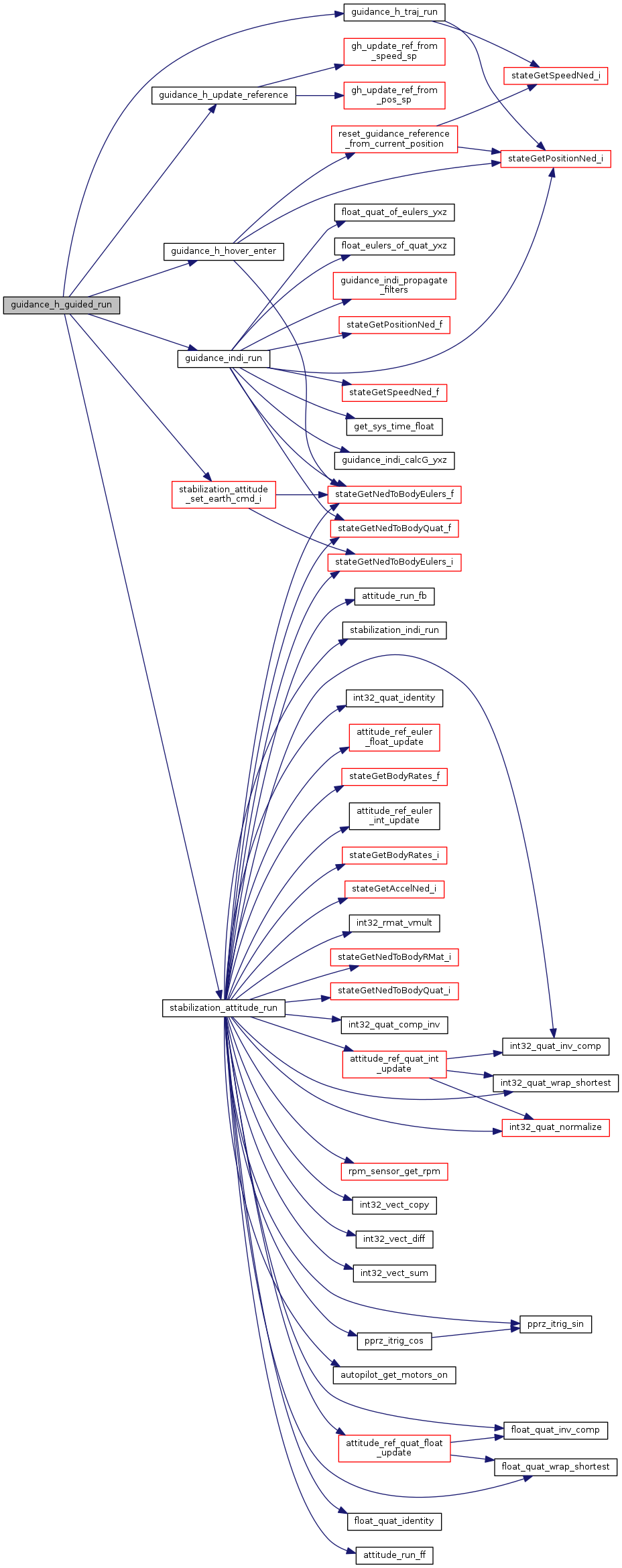
| void guidance_h_guided_run | ( | bool | in_flight | ) |
Run GUIDED mode control.
Definition at line 676 of file guidance_h.c.
References ANGLE_BFP_OF_REAL, guidance_h, guidance_h_cmd_earth, guidance_h_hover_enter(), guidance_h_traj_run(), guidance_h_update_reference(), guidance_indi_run(), HorizontalGuidanceSetpoint::heading, HorizontalGuidance::sp, stabilization_attitude_run(), and stabilization_attitude_set_earth_cmd_i().
Referenced by guidance_h_run().
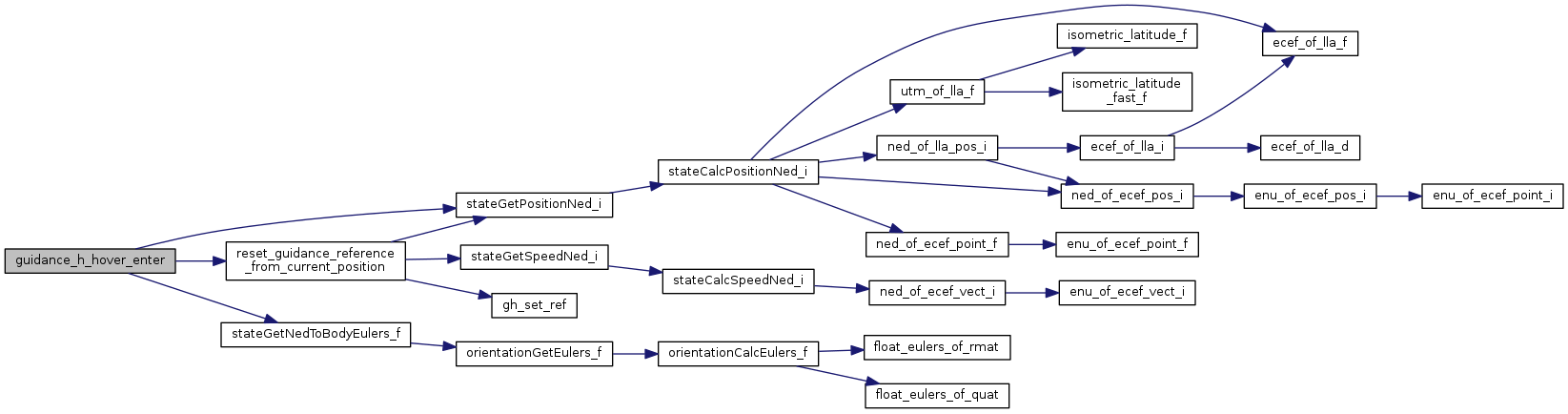
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_h_hover_enter | ( | void | ) |
Definition at line 532 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceSetpoint::mask, HorizontalGuidanceSetpoint::pos, FloatEulers::psi, HorizontalGuidance::rc_sp, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, stateGetNedToBodyEulers_f(), stateGetPositionNed_i(), VECT2_COPY, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_guided_run(), and guidance_h_mode_changed().
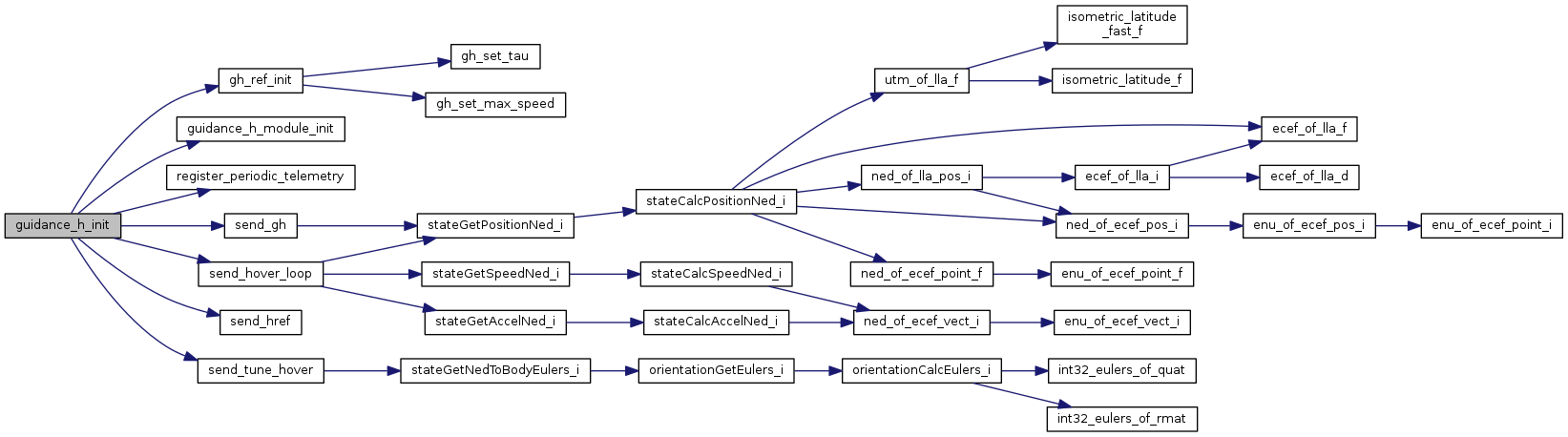
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_h_init | ( | void | ) |
Definition at line 166 of file guidance_h.c.
References HorizontalGuidanceGains::a, HorizontalGuidance::approx_force_by_thrust, HorizontalGuidanceGains::d, DefaultPeriodic, FLOAT_EULERS_ZERO, HorizontalGuidance::gains, gh_ref_init(), guidance_h, GUIDANCE_H_AGAIN, GUIDANCE_H_APPROX_FORCE_BY_THRUST, GUIDANCE_H_MODE_KILL, guidance_h_module_init(), guidance_h_trim_att_integrator, GUIDANCE_H_USE_REF, GUIDANCE_H_VGAIN, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceSetpoint::heading_rate, HorizontalGuidanceGains::i, INT_VECT2_ZERO, HorizontalGuidance::mode, HorizontalGuidanceGains::p, HorizontalGuidanceSetpoint::pos, HorizontalGuidance::rc_sp, register_periodic_telemetry(), send_gh(), send_hover_loop(), send_href(), send_tune_hover(), HorizontalGuidance::sp, transition_theta_offset, HorizontalGuidance::use_ref, and HorizontalGuidanceGains::v.
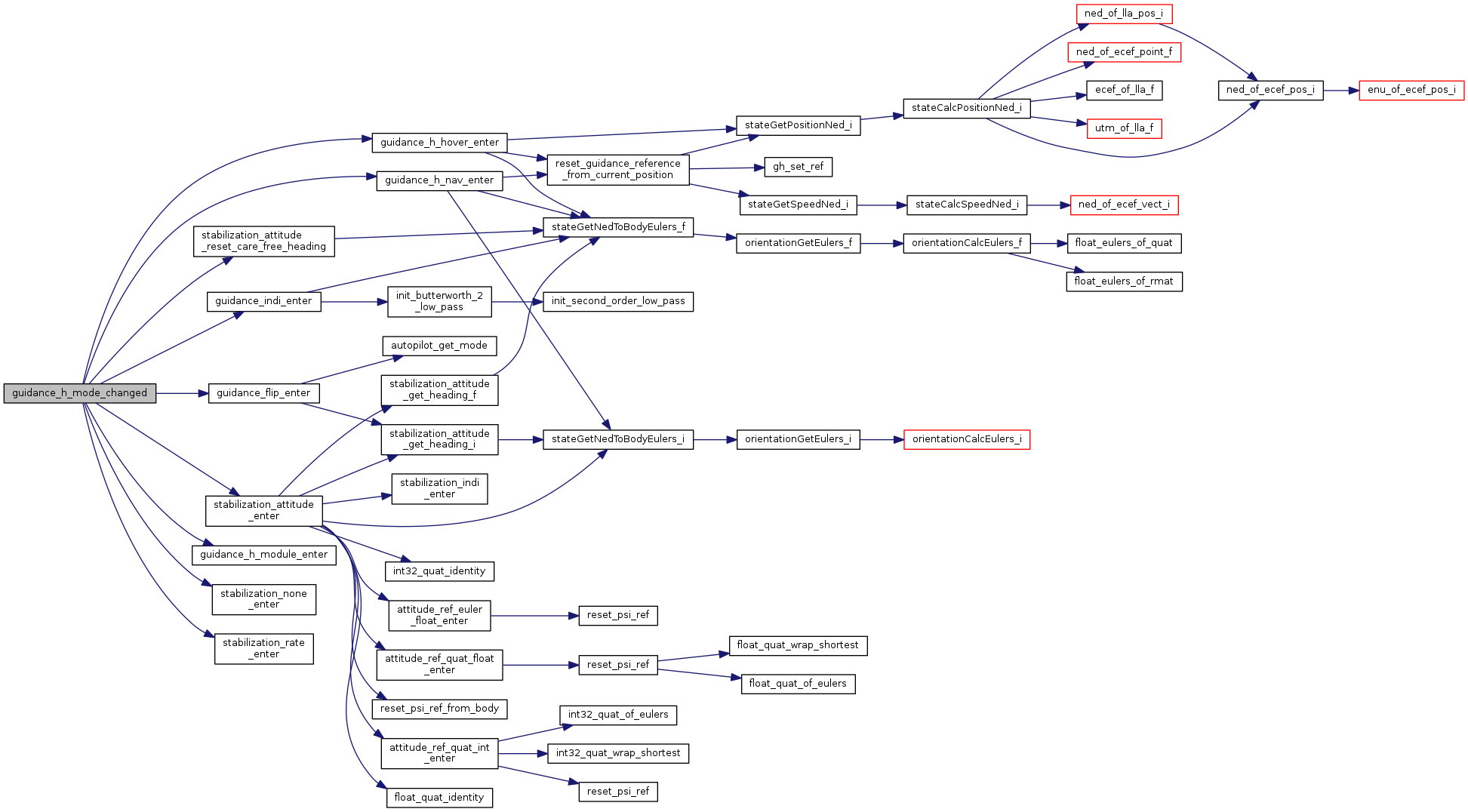
Here is the call graph for this function:| void guidance_h_mode_changed | ( | uint8_t | new_mode | ) |
Definition at line 212 of file guidance_h.c.
References guidance_flip_enter(), guidance_h, guidance_h_hover_enter(), GUIDANCE_H_MODE_ATTITUDE, GUIDANCE_H_MODE_CARE_FREE, GUIDANCE_H_MODE_FLIP, GUIDANCE_H_MODE_FORWARD, GUIDANCE_H_MODE_GUIDED, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_KILL, GUIDANCE_H_MODE_MODULE, GUIDANCE_H_MODE_NAV, GUIDANCE_H_MODE_RATE, GUIDANCE_H_MODE_RC_DIRECT, guidance_h_module_enter(), guidance_h_nav_enter(), guidance_hybrid_norm_ref_airspeed, guidance_indi_enter(), HorizontalGuidance::mode, stabilization_attitude_enter(), stabilization_attitude_reset_care_free_heading(), stabilization_none_enter(), and stabilization_rate_enter().
Referenced by autopilot_static_set_mode().
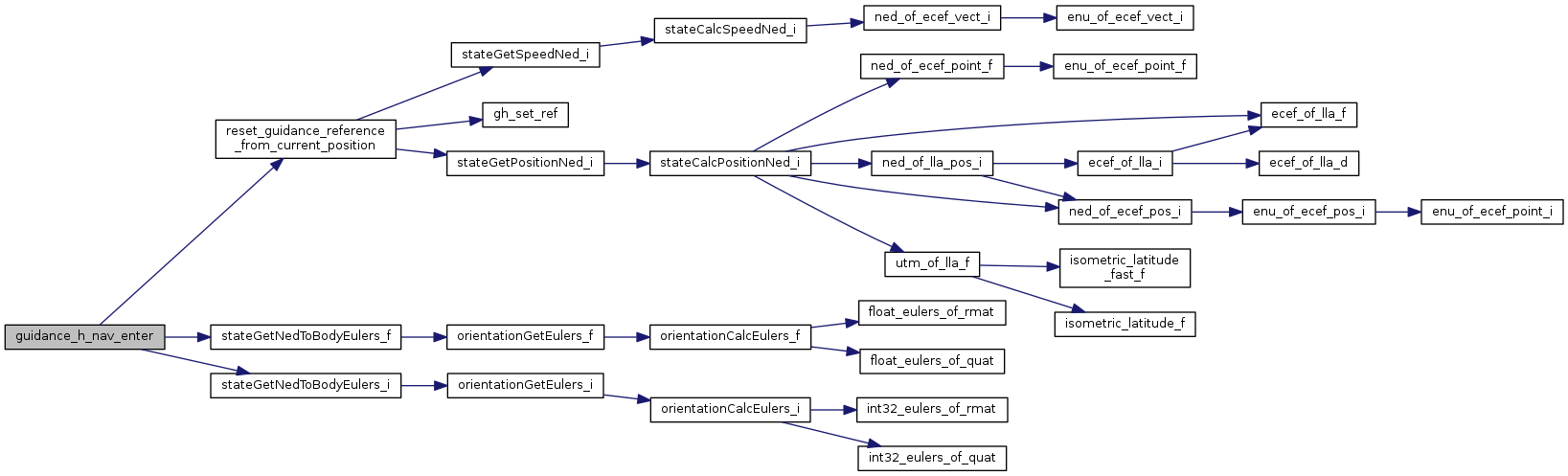
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_h_nav_enter | ( | void | ) |
Definition at line 555 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::heading, INT32_VECT2_NED_OF_ENU, HorizontalGuidanceSetpoint::mask, nav_heading, navigation_carrot, HorizontalGuidanceSetpoint::pos, FloatEulers::psi, Int32Eulers::psi, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, stateGetNedToBodyEulers_f(), and stateGetNedToBodyEulers_i().
Referenced by guidance_h_from_nav(), and guidance_h_mode_changed().
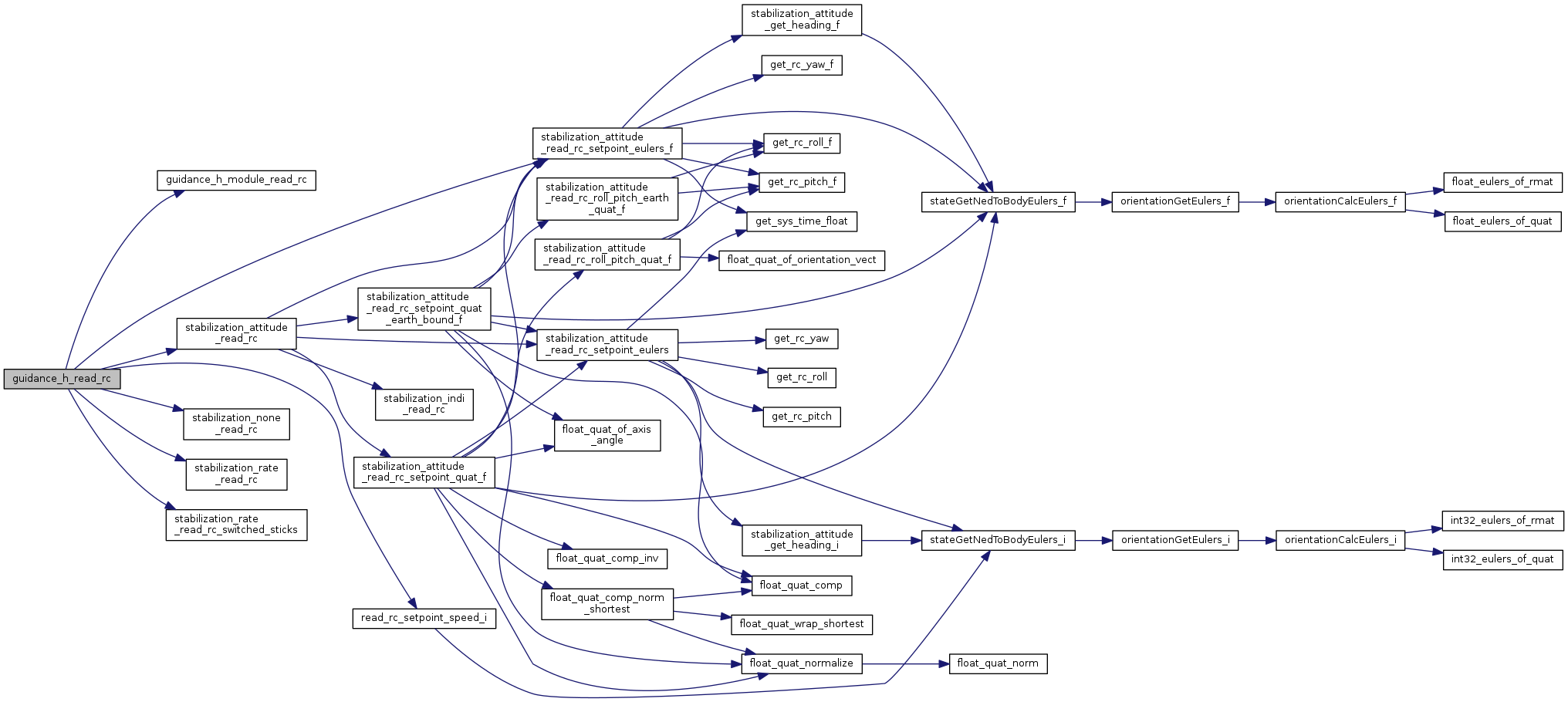
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_h_read_rc | ( | bool | in_flight | ) |
Definition at line 292 of file guidance_h.c.
References FALSE, FLOAT_EULERS_ZERO, guidance_h, GUIDANCE_H_MODE_ATTITUDE, GUIDANCE_H_MODE_CARE_FREE, GUIDANCE_H_MODE_FLIP, GUIDANCE_H_MODE_FORWARD, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_MODULE, GUIDANCE_H_MODE_NAV, GUIDANCE_H_MODE_RATE, GUIDANCE_H_MODE_RC_DIRECT, guidance_h_module_read_rc(), HorizontalGuidanceSetpoint::mask, HorizontalGuidance::mode, radio_control, RC_OK, HorizontalGuidance::rc_sp, read_rc_setpoint_speed_i(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, stabilization_attitude_read_rc(), stabilization_attitude_read_rc_setpoint_eulers_f(), stabilization_none_read_rc(), stabilization_rate_read_rc(), stabilization_rate_read_rc_switched_sticks(), RadioControl::status, and TRUE.
Referenced by autopilot_static_on_rc_frame(), and ins_ekf2_publish_attitude().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_h_run | ( | bool | in_flight | ) |
Definition at line 351 of file guidance_h.c.
References guidance_flip_run(), guidance_h, guidance_h_from_nav(), guidance_h_guided_run(), GUIDANCE_H_MODE_ATTITUDE, GUIDANCE_H_MODE_CARE_FREE, GUIDANCE_H_MODE_FLIP, GUIDANCE_H_MODE_FORWARD, GUIDANCE_H_MODE_GUIDED, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_MODULE, GUIDANCE_H_MODE_NAV, GUIDANCE_H_MODE_RATE, GUIDANCE_H_MODE_RC_DIRECT, guidance_h_module_run(), HorizontalGuidanceSetpoint::heading, INT32_PERCENTAGE_FRAC, HorizontalGuidance::mode, FloatEulers::psi, HorizontalGuidance::rc_sp, HorizontalGuidance::sp, stabilization_attitude_run(), stabilization_filter_commands(), stabilization_none_run(), stabilization_rate_run(), and transition_run().
Referenced by autopilot_static_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| bool guidance_h_set_guided_body_vel | ( | float | vx, |
| float | vy | ||
| ) |
Set body relative horizontal velocity setpoint in GUIDED mode.
| vx | forward velocity (body frame) in meters/sec. |
| vy | right velocity (body frame) in meters/sec. |
Definition at line 719 of file guidance_h.c.
References guidance_h_set_guided_vel(), FloatEulers::psi, Int32Eulers::psi, and stateGetNedToBodyEulers_f().
Referenced by autopilot_guided_update(), and orange_avoider_guided_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| bool guidance_h_set_guided_heading | ( | float | heading | ) |
Set heading setpoint in GUIDED mode.
| heading | Setpoint in radians. |
Definition at line 708 of file guidance_h.c.
References FLOAT_ANGLE_NORMALIZE, guidance_h, GUIDANCE_H_MODE_GUIDED, heading, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceSetpoint::mask, HorizontalGuidance::mode, and HorizontalGuidance::sp.
Referenced by autopilot_guided_goto_ned(), autopilot_guided_move_ned(), autopilot_guided_update(), and orange_avoider_guided_periodic().
Here is the caller graph for this function:| bool guidance_h_set_guided_heading_rate | ( | float | rate | ) |
Set heading rate setpoint in GUIDED mode.
| rate | Heading rate in radians. |
Definition at line 738 of file guidance_h.c.
References guidance_h, GUIDANCE_H_MODE_GUIDED, HorizontalGuidanceSetpoint::heading_rate, HorizontalGuidanceSetpoint::mask, HorizontalGuidance::mode, and HorizontalGuidance::sp.
Referenced by autopilot_guided_update(), and orange_avoider_guided_periodic().
Here is the caller graph for this function:| bool guidance_h_set_guided_pos | ( | float | x, |
| float | y | ||
| ) |
Set horizontal position setpoint in GUIDED mode.
| x | North position (local NED frame) in meters. |
| y | East position (local NED frame) in meters. |
Definition at line 697 of file guidance_h.c.
References guidance_h, GUIDANCE_H_MODE_GUIDED, HorizontalGuidanceSetpoint::mask, HorizontalGuidance::mode, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, HorizontalGuidance::sp, Int32Vect2::x, and Int32Vect2::y.
Referenced by autopilot_guided_goto_ned(), and autopilot_guided_update().
Here is the caller graph for this function:| bool guidance_h_set_guided_vel | ( | float | vx, |
| float | vy | ||
| ) |
Set horizontal velocity setpoint in GUIDED mode.
| vx | North velocity (local NED frame) in meters/sec. |
| vy | East velocity (local NED frame) in meters/sec. |
Definition at line 727 of file guidance_h.c.
References guidance_h, GUIDANCE_H_MODE_GUIDED, HorizontalGuidanceSetpoint::mask, HorizontalGuidance::mode, HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, SPEED_BFP_OF_REAL, Int32Vect2::x, and Int32Vect2::y.
Referenced by autopilot_guided_move_ned(), autopilot_guided_update(), and guidance_h_set_guided_body_vel().
Here is the caller graph for this function:| void guidance_h_set_igain | ( | uint32_t | igain | ) |
Definition at line 669 of file guidance_h.c.
References HorizontalGuidance::gains, guidance_h, guidance_h_trim_att_integrator, HorizontalGuidanceGains::i, and INT_VECT2_ZERO.
|
static |
Definition at line 462 of file guidance_h.c.
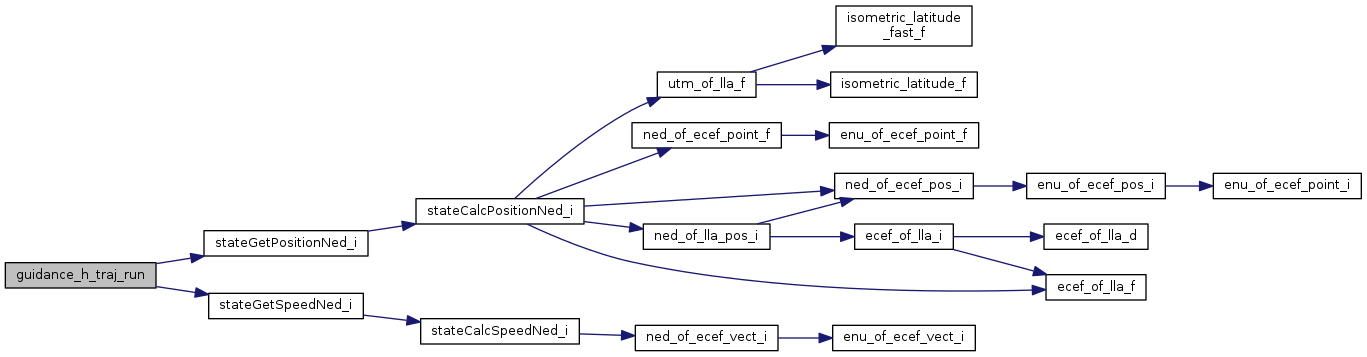
References HorizontalGuidanceGains::a, HorizontalGuidanceReference::accel, ANGLE_BFP_OF_REAL, HorizontalGuidance::approx_force_by_thrust, BFP_OF_REAL, HorizontalGuidanceGains::d, HorizontalGuidance::gains, GH_GAIN_SCALE, guidance_h, guidance_h_cmd_earth, GUIDANCE_H_MAX_BANK, guidance_h_pos_err, guidance_h_speed_err, GUIDANCE_H_THRUST_CMD_FILTER, guidance_h_trim_att_integrator, guidance_v_thrust_coeff, HorizontalGuidanceGains::i, INT32_ACCEL_FRAC, INT32_ANGLE_FRAC, INT32_ANGLE_PI_2, INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_TRIG_FRAC, INT_VECT2_ZERO, MAX_POS_ERR, MAX_PPRZ, MAX_SPEED_ERR, Min, HorizontalGuidanceGains::p, HorizontalGuidanceReference::pos, HorizontalGuidance::ref, HorizontalGuidanceReference::speed, stabilization_cmd, stateGetPositionNed_i(), stateGetSpeedNed_i(), HorizontalGuidanceGains::v, VECT2_DIFF, VECT2_STRIM, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 414 of file guidance_h.c.
References HorizontalGuidanceReference::accel, GuidanceHRef::accel, FLOAT_ANGLE_NORMALIZE, GH_ACCEL_REF_FRAC, GH_POS_REF_FRAC, gh_ref, GH_SPEED_REF_FRAC, gh_update_ref_from_pos_sp(), gh_update_ref_from_speed_sp(), guidance_h, GUIDANCE_H_MODE_HOVER, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceSetpoint::heading_rate, INT32_ACCEL_FRAC, INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_VECT2_LSHIFT, INT32_VECT2_RSHIFT, INT_VECT2_ZERO, HorizontalGuidanceSetpoint::mask, HorizontalGuidance::mode, HorizontalGuidanceReference::pos, GuidanceHRef::pos, HorizontalGuidanceSetpoint::pos, HorizontalGuidance::ref, HorizontalGuidance::sp, HorizontalGuidanceReference::speed, GuidanceHRef::speed, HorizontalGuidanceSetpoint::speed, HorizontalGuidance::use_ref, and VECT2_COPY.
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
read speed setpoint from RC
Definition at line 639 of file guidance_h.c.
References GUIDANCE_H_REF_MAX_SPEED, INT32_TRIG_FRAC, MAX_PPRZ, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, radio_control, RADIO_PITCH, RADIO_ROLL, SPEED_BFP_OF_REAL, stateGetNedToBodyEulers_i(), RadioControl::values, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_read_rc().
Here is the call graph for this function: Here is the caller graph for this function:
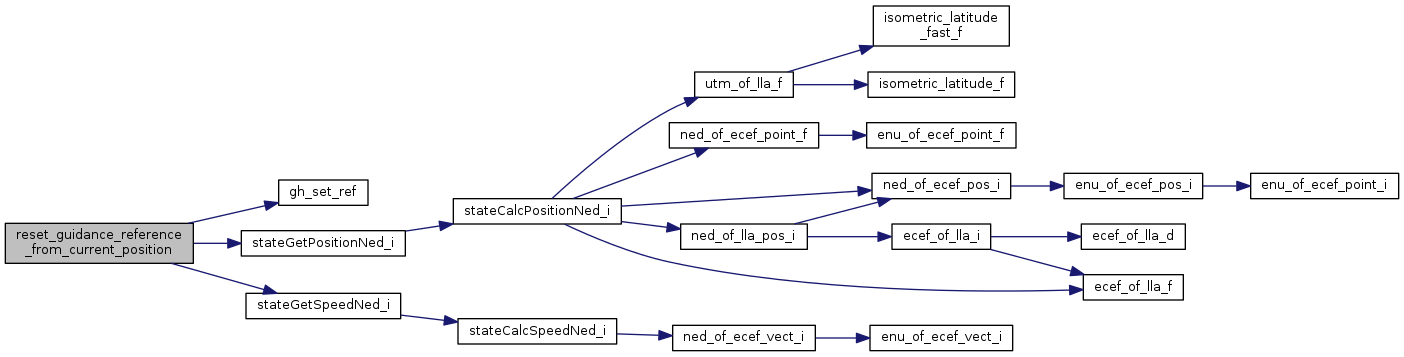
|
inlinestatic |
Definition at line 202 of file guidance_h.c.
References HorizontalGuidanceReference::accel, gh_set_ref(), guidance_h, guidance_h_trim_att_integrator, INT_VECT2_ZERO, HorizontalGuidanceReference::pos, HorizontalGuidance::ref, HorizontalGuidanceReference::speed, stateGetPositionNed_i(), stateGetSpeedNed_i(), and VECT2_COPY.
Referenced by guidance_h_hover_enter(), and guidance_h_nav_enter().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 107 of file guidance_h.c.
References guidance_h, HorizontalGuidanceReference::pos, HorizontalGuidanceSetpoint::pos, HorizontalGuidance::ref, HorizontalGuidance::sp, stateGetPositionNed_i(), NedCoor_i::x, Int32Vect2::x, NedCoor_i::y, and Int32Vect2::y.
Referenced by guidance_h_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 116 of file guidance_h.c.
References guidance_h, guidance_h_cmd_earth, guidance_h_pos_err, guidance_h_speed_err, guidance_h_trim_att_integrator, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceSetpoint::pos, HorizontalGuidance::sp, stateGetAccelNed_i(), stateGetPositionNed_i(), stateGetSpeedNed_i(), NedCoor_i::x, Int32Vect2::x, NedCoor_i::y, and Int32Vect2::y.
Referenced by guidance_h_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 138 of file guidance_h.c.
References HorizontalGuidanceReference::accel, guidance_h, HorizontalGuidanceReference::pos, HorizontalGuidanceSetpoint::pos, HorizontalGuidance::ref, HorizontalGuidance::sp, HorizontalGuidanceReference::speed, HorizontalGuidanceSetpoint::speed, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_init().
Here is the caller graph for this function:
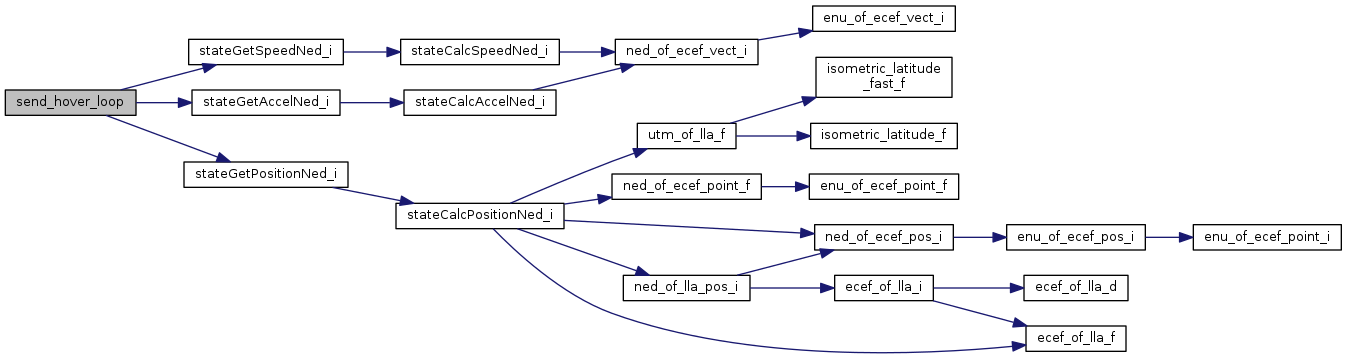
|
static |
Definition at line 149 of file guidance_h.c.
References radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_YAW, stabilization_cmd, stateGetNedToBodyEulers_i(), and RadioControl::values.
Referenced by guidance_h_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 621 of file guidance_h.c.
References ANGLE_BFP_OF_REAL, INT32_ANGLE_FRAC, INT32_PERCENTAGE_FRAC, INT_MULT_RSHIFT, and transition_theta_offset.
Referenced by guidance_h_run().
Here is the caller graph for this function:| struct HorizontalGuidance guidance_h |
Definition at line 80 of file guidance_h.c.
Referenced by gps_sim_hitl_event(), guidance_h_from_nav(), guidance_h_guided_run(), guidance_h_hover_enter(), guidance_h_init(), guidance_h_mode_changed(), guidance_h_nav_enter(), guidance_h_read_rc(), guidance_h_run(), guidance_h_set_guided_heading(), guidance_h_set_guided_heading_rate(), guidance_h_set_guided_pos(), guidance_h_set_guided_vel(), guidance_h_set_igain(), guidance_h_traj_run(), guidance_h_update_reference(), guidance_hybrid_position_to_airspeed(), guidance_indi_run(), ins_ekf2_publish_attitude(), orange_avoider_guided_periodic(), reset_guidance_reference_from_current_position(), send_fp(), send_gh(), send_hover_loop(), send_href(), and send_status().
| struct Int32Vect2 guidance_h_cmd_earth |
horizontal guidance command.
In north/east with INT32_ANGLE_FRAC
Definition at line 95 of file guidance_h.c.
Referenced by guidance_h_from_nav(), guidance_h_guided_run(), guidance_h_traj_run(), and send_hover_loop().
| struct Int32Vect2 guidance_h_pos_err |
Definition at line 87 of file guidance_h.c.
Referenced by guidance_h_get_pos_err(), guidance_h_traj_run(), and send_hover_loop().
| struct Int32Vect2 guidance_h_speed_err |
Definition at line 88 of file guidance_h.c.
Referenced by guidance_h_traj_run(), and send_hover_loop().
| struct Int32Vect2 guidance_h_trim_att_integrator |
Definition at line 89 of file guidance_h.c.
Referenced by guidance_h_init(), guidance_h_set_igain(), guidance_h_traj_run(), reset_guidance_reference_from_current_position(), and send_hover_loop().
| int32_t transition_percentage |
Definition at line 82 of file guidance_h.c.
Referenced by ctrl_eff_scheduling_periodic().
 1.8.8
1.8.8