|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
A guidance mode based on Incremental Nonlinear Dynamic Inversion. More...
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_indi.h"#include "subsystems/ins/ins_int.h"#include "subsystems/radio_control.h"#include "state.h"#include "subsystems/imu.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/autopilot_rc_helpers.h"#include "mcu_periph/sys_time.h"#include "autopilot.h"#include "stabilization/stabilization_attitude_ref_quat_int.h"#include "firmwares/rotorcraft/stabilization.h"#include "filters/low_pass_filter.h"#include "subsystems/abi.h" Include dependency graph for guidance_indi.c:
Include dependency graph for guidance_indi.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_INDI_ACCEL_SP_ID ABI_BROADCAST |
| #define | GUIDANCE_INDI_FILTER_CUTOFF 3.0 |
Functions | |
| static void | accel_sp_cb (uint8_t sender_id, uint8_t flag, struct FloatVect3 *accel_sp) |
| ABI callback that obtains the acceleration setpoint from telemetry flag: 0 -> 2D, 1 -> 3D. More... | |
| static void | guidance_indi_propagate_filters (struct FloatEulers *eulers) |
| Low pass the accelerometer measurements to remove noise from vibrations. More... | |
| static void | guidance_indi_calcG (struct FloatMat33 *Gmat) |
| static void | guidance_indi_calcG_yxz (struct FloatMat33 *Gmat, struct FloatEulers *euler_yxz) |
| void | guidance_indi_init (void) |
| Init function. More... | |
| void | guidance_indi_enter (void) |
| Call upon entering indi guidance. More... | |
| void | guidance_indi_run (float heading_sp) |
Variables | |
| float | guidance_indi_pos_gain = 0.5 |
| float | guidance_indi_speed_gain = 1.8 |
| abi_event | accel_sp_ev |
| struct FloatVect3 | indi_accel_sp = {0.0, 0.0, 0.0} |
| bool | indi_accel_sp_set_2d = false |
| bool | indi_accel_sp_set_3d = false |
| struct FloatVect3 | sp_accel = {0.0, 0.0, 0.0} |
| float | thrust_act = 0 |
| Butterworth2LowPass | filt_accel_ned [3] |
| Butterworth2LowPass | roll_filt |
| Butterworth2LowPass | pitch_filt |
| Butterworth2LowPass | thrust_filt |
| struct FloatMat33 | Ga |
| struct FloatMat33 | Ga_inv |
| struct FloatVect3 | control_increment |
| float | filter_cutoff = GUIDANCE_INDI_FILTER_CUTOFF |
| float | guidance_indi_max_bank = GUIDANCE_H_MAX_BANK |
| float | time_of_accel_sp_2d = 0.0 |
| float | time_of_accel_sp_3d = 0.0 |
| struct FloatEulers | guidance_euler_cmd |
| float | thrust_in |
A guidance mode based on Incremental Nonlinear Dynamic Inversion.
Based on the papers: Cascaded Incremental Nonlinear Dynamic Inversion Control for MAV Disturbance Rejection https://www.researchgate.net/publication/312907985_Cascaded_Incremental_Nonlinear_Dynamic_Inversion_Control_for_MAV_Disturbance_Rejection
Gust Disturbance Alleviation with Incremental Nonlinear Dynamic Inversion https://www.researchgate.net/publication/309212603_Gust_Disturbance_Alleviation_with_Incremental_Nonlinear_Dynamic_Inversion
Definition in file guidance_indi.c.
| #define GUIDANCE_INDI_ACCEL_SP_ID ABI_BROADCAST |
Definition at line 68 of file guidance_indi.c.
Referenced by guidance_indi_init().
| #define GUIDANCE_INDI_FILTER_CUTOFF 3.0 |
Definition at line 95 of file guidance_indi.c.
|
static |
ABI callback that obtains the acceleration setpoint from telemetry flag: 0 -> 2D, 1 -> 3D.
Definition at line 362 of file guidance_indi.c.
References get_sys_time_float(), indi_accel_sp_set_2d, indi_accel_sp_set_3d, time_of_accel_sp_2d, time_of_accel_sp_3d, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by guidance_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
| Gmat | array to write the matrix to [3x3] |
Calculate the matrix of partial derivatives of the roll, pitch and thrust. w.r.t. the NED accelerations for ZYX eulers ddx = G*[dtheta,dphi,dT]
Definition at line 333 of file guidance_indi.c.
References FloatEulers::phi, FloatEulers::psi, RMAT_ELMT, stateGetNedToBodyEulers_f(), mesonh.mesonh_atmosphere::T, and FloatEulers::theta.
Here is the call graph for this function:
|
static |
| Gmat | array to write the matrix to [3x3] |
Calculate the matrix of partial derivatives of the pitch, roll and thrust. w.r.t. the NED accelerations for YXZ eulers ddx = G*[dtheta,dphi,dT]
Definition at line 305 of file guidance_indi.c.
References FloatEulers::phi, RMAT_ELMT, mesonh.mesonh_atmosphere::T, and FloatEulers::theta.
Referenced by guidance_indi_run().
Here is the caller graph for this function:| void guidance_indi_enter | ( | void | ) |
Call upon entering indi guidance.
Definition at line 134 of file guidance_indi.c.
References filter_cutoff, init_butterworth_2_low_pass(), FloatEulers::phi, stabilization_cmd, stateGetNedToBodyEulers_f(), FloatEulers::theta, thrust_act, and thrust_in.
Referenced by guidance_h_mode_changed().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_init | ( | void | ) |
Init function.
Definition at line 125 of file guidance_indi.c.
References accel_sp_cb(), and GUIDANCE_INDI_ACCEL_SP_ID.
Here is the call graph for this function:
|
static |
Low pass the accelerometer measurements to remove noise from vibrations.
The roll and pitch also need to be filtered to synchronize them with the acceleration
Definition at line 287 of file guidance_indi.c.
References FloatEulers::phi, stateGetAccelNed_f(), FloatEulers::theta, update_butterworth_2_low_pass(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by guidance_indi_run().
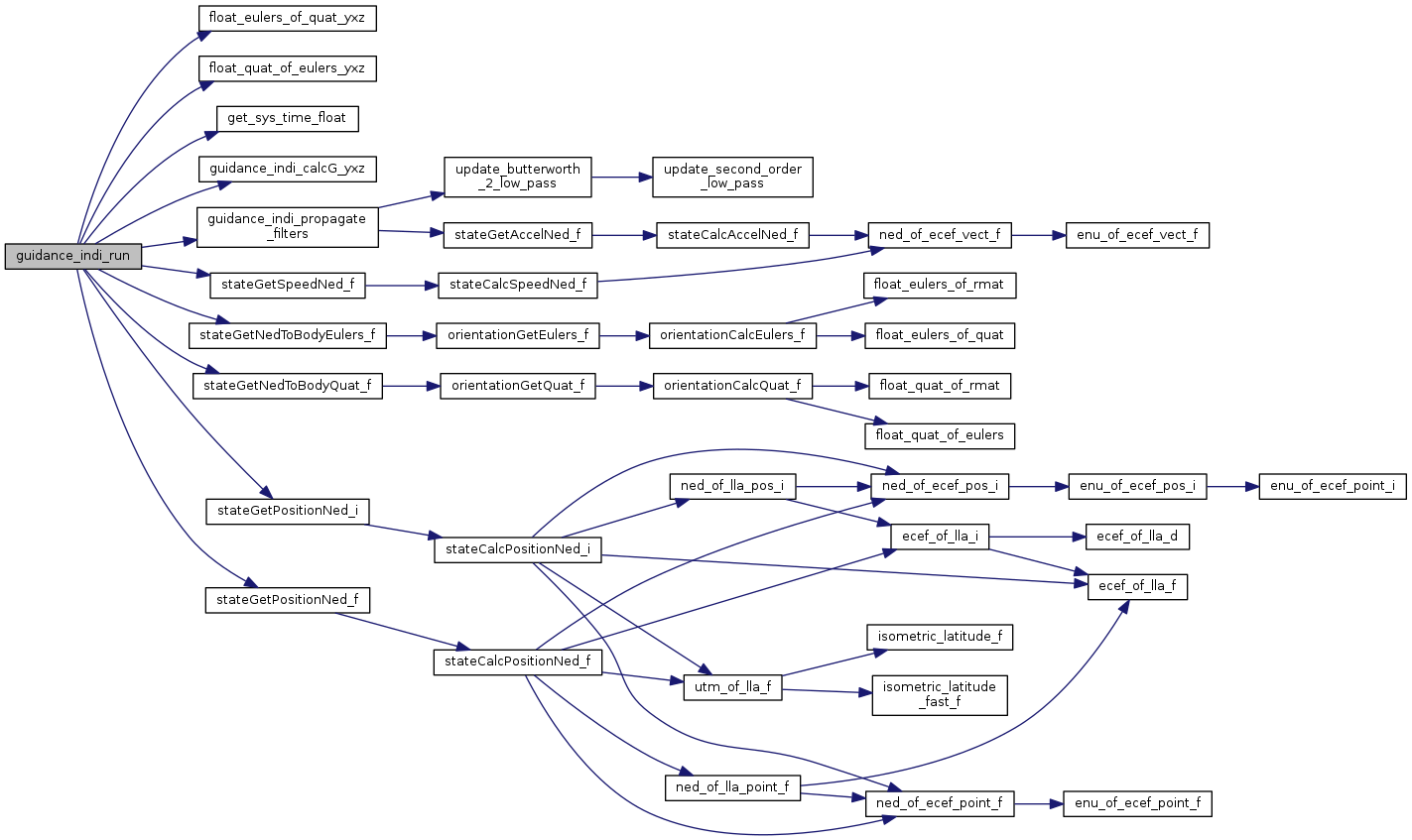
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_run | ( | float | heading_sp | ) |
| heading_sp | the desired heading [rad] |
main indi guidance function
Definition at line 154 of file guidance_indi.c.
References control_increment, float_eulers_of_quat_yxz(), float_quat_of_eulers_yxz(), Ga, Ga_inv, get_sys_time_float(), guidance_euler_cmd, guidance_h, guidance_indi_calcG_yxz(), guidance_indi_max_bank, guidance_indi_pos_gain, guidance_indi_propagate_filters(), guidance_indi_speed_gain, guidance_v_z_ref, indi_accel_sp_set_2d, indi_accel_sp_set_3d, MAT33_INV, MAT33_VECT3_MUL, SecondOrderLowPass::o, FloatEulers::phi, HorizontalGuidanceReference::pos, POS_FLOAT_OF_BFP, FloatEulers::psi, QUAT_BFP_OF_REAL, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, HorizontalGuidance::ref, stab_att_sp_quat, stabilization_cmd, stateGetNedToBodyEulers_f(), stateGetNedToBodyQuat_f(), stateGetPositionNed_f(), stateGetPositionNed_i(), stateGetSpeedNed_f(), FloatEulers::theta, thrust_in, THRUST_INCREMENT_ID, time_of_accel_sp_2d, time_of_accel_sp_3d, RadioControl::values, FloatVect3::x, NedCoor_f::x, Int32Vect2::x, FloatVect3::y, NedCoor_f::y, Int32Vect2::y, FloatVect3::z, and NedCoor_f::z.
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:| abi_event accel_sp_ev |
Definition at line 70 of file guidance_indi.c.
| struct FloatVect3 control_increment |
Definition at line 107 of file guidance_indi.c.
Referenced by guidance_indi_run().
| Butterworth2LowPass filt_accel_ned[3] |
Definition at line 100 of file guidance_indi.c.
| float filter_cutoff = GUIDANCE_INDI_FILTER_CUTOFF |
Definition at line 109 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| struct FloatMat33 Ga |
Definition at line 105 of file guidance_indi.c.
Referenced by guidance_indi_run().
| struct FloatMat33 Ga_inv |
Definition at line 106 of file guidance_indi.c.
Referenced by guidance_indi_run().
| struct FloatEulers guidance_euler_cmd |
Definition at line 115 of file guidance_indi.c.
Referenced by guidance_indi_run().
| float guidance_indi_max_bank = GUIDANCE_H_MAX_BANK |
Definition at line 110 of file guidance_indi.c.
Referenced by guidance_indi_run().
| float guidance_indi_pos_gain = 0.5 |
Definition at line 58 of file guidance_indi.c.
Referenced by guidance_indi_run().
| float guidance_indi_speed_gain = 1.8 |
Definition at line 64 of file guidance_indi.c.
Referenced by guidance_indi_run().
| struct FloatVect3 indi_accel_sp = {0.0, 0.0, 0.0} |
Definition at line 72 of file guidance_indi.c.
| bool indi_accel_sp_set_2d = false |
Definition at line 73 of file guidance_indi.c.
Referenced by accel_sp_cb(), and guidance_indi_run().
| bool indi_accel_sp_set_3d = false |
Definition at line 74 of file guidance_indi.c.
Referenced by accel_sp_cb(), and guidance_indi_run().
| Butterworth2LowPass pitch_filt |
Definition at line 102 of file guidance_indi.c.
| Butterworth2LowPass roll_filt |
Definition at line 101 of file guidance_indi.c.
| struct FloatVect3 sp_accel = {0.0, 0.0, 0.0} |
Definition at line 76 of file guidance_indi.c.
| float thrust_act = 0 |
Definition at line 99 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| Butterworth2LowPass thrust_filt |
Definition at line 103 of file guidance_indi.c.
| float thrust_in |
Definition at line 116 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_run().
| float time_of_accel_sp_2d = 0.0 |
Definition at line 112 of file guidance_indi.c.
Referenced by accel_sp_cb(), and guidance_indi_run().
| float time_of_accel_sp_3d = 0.0 |
Definition at line 113 of file guidance_indi.c.
Referenced by accel_sp_cb(), and guidance_indi_run().
 1.8.8
1.8.8