|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
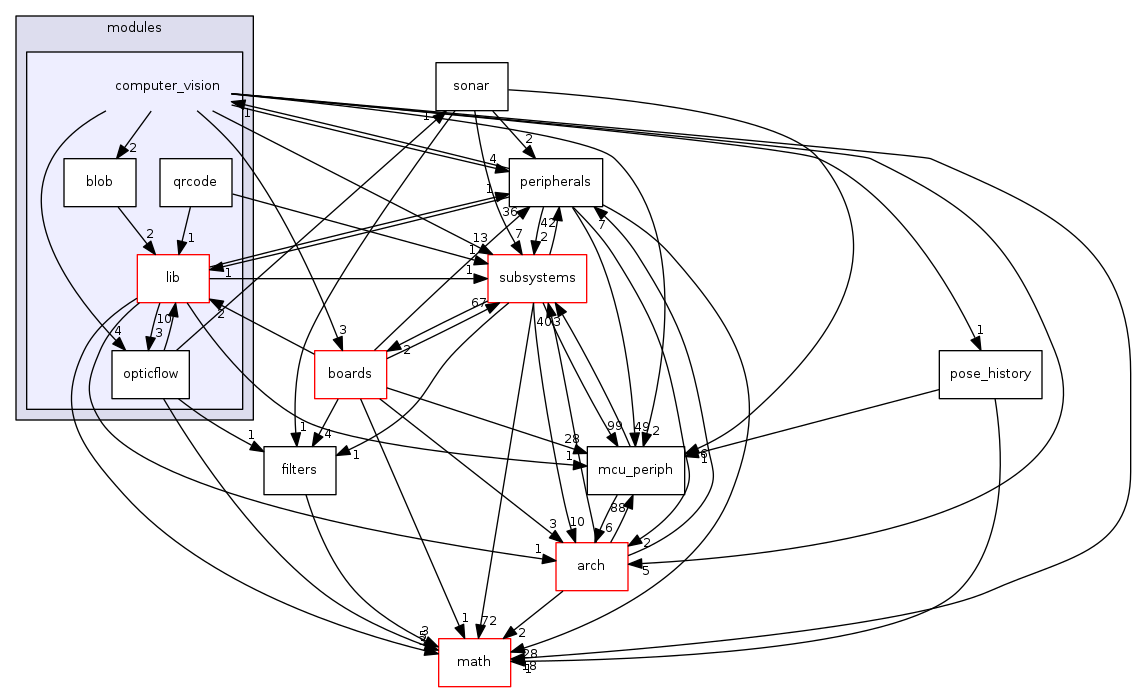
 Directory dependency graph for computer_vision:
Directory dependency graph for computer_vision:Directories | |
| directory | blob |
| directory | lib |
| directory | opticflow |
| directory | qrcode |
Files | |
| file | bebop_ae_awb.c [code] |
| file | bebop_ae_awb.h [code] |
| file | colorfilter.c [code] |
| file | colorfilter.h [code] |
| file | cv.c [code] |
| Computer vision framework for onboard processing. | |
| file | cv.h [code] |
| Computer vision framework for onboard processing. | |
| file | cv_blob_locator.c [code] |
| file | cv_blob_locator.h [code] |
| file | cv_detect_color_object.c [code] |
| file | cv_detect_color_object.h [code] |
| Assumes the color_object consists of a continuous color and checks if you are over the defined color_object or not. | |
| file | cv_georeference.c [code] |
| file | cv_georeference.h [code] |
| file | cv_opencvdemo.c [code] |
| file | cv_opencvdemo.h [code] |
| file | cv_target_localization.c [code] |
| file | cv_target_localization.h [code] |
| file | detect_contour.c [code] |
| file | detect_contour.h [code] |
| file | detect_gate.c [code] |
| file | detect_gate.h [code] |
| file | detect_window.c [code] |
| file | detect_window.h [code] |
| Detect a bright region surrounded by dark or viceversa - sometimes this corresponds to a window. | |
| file | opencv_contour.cpp [code] |
| file | opencv_contour.h [code] |
| Detects contours of an obstacle used in the autonomous drone racing. | |
| file | opencv_example.cpp [code] |
| file | opencv_example.h [code] |
| file | opencv_image_functions.cpp [code] |
| A small library with functions to convert between the Paparazzi used YUV422 arrays and the opencv image functions. | |
| file | opencv_image_functions.h [code] |
| A small library with functions to convert between the Paparazzi used YUV422 arrays and the opencv image functions. | |
| file | opticflow_module.c [code] |
| Optical-flow estimation module. | |
| file | opticflow_module.h [code] |
| optical-flow calculation for Parrot Drones | |
| file | snake_gate_detection.c [code] |
| Detects gates as used in the IROS drone races, i.e., square colored gates. | |
| file | snake_gate_detection.h [code] |
| Detects gates as used in the IROS drone races, i.e., square colored gates. | |
| file | textons.c [code] |
| Takes an image and represents the texture and colors in the image with a texton histogram. | |
| file | textons.h [code] |
| Takes an image and represents the texture and colors in the image with a texton histogram. | |
| file | undistort_image.c [code] |
| file | undistort_image.h [code] |
| file | video_capture.c [code] |
| file | video_capture.h [code] |
| file | video_thread.c [code] |
| file | video_thread.h [code] |
| Start a Video thread and grab images. | |
| file | video_thread_nps.c [code] |
| file | video_thread_nps.h [code] |
| This header gives NPS access to the list of added cameras. | |
| file | video_usb_logger.c [code] |
| file | video_usb_logger.h [code] |
| Camera image logger for Linux based autopilots. | |
| file | viewvideo.c [code] |
| Get live images from a RTP/UDP stream and save pictures on internal memory. | |
| file | viewvideo.h [code] |
| Get live images from a RTP/UDP stream and save pictures on internal memory. | |
 1.8.8
1.8.8