|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Read an attitude setpoint from the RC. More...
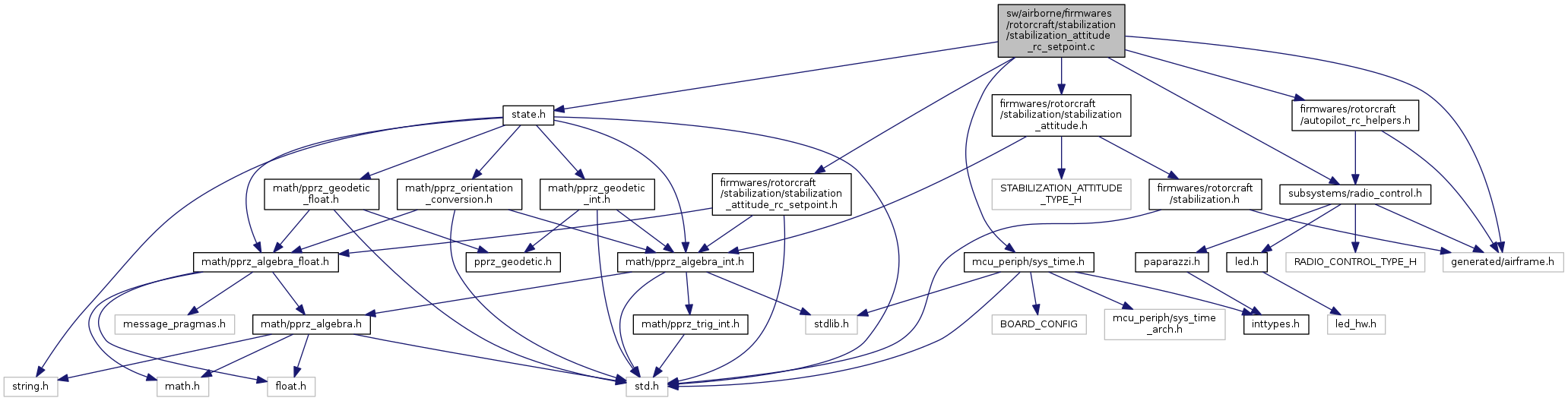
#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "generated/airframe.h"#include "subsystems/radio_control.h"#include "state.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/autopilot_rc_helpers.h"#include "mcu_periph/sys_time.h" Include dependency graph for stabilization_attitude_rc_setpoint.c:
Include dependency graph for stabilization_attitude_rc_setpoint.c:Go to the source code of this file.
Macros | |
| #define | STABILIZATION_ATTITUDE_DEADBAND_A 0 |
| #define | STABILIZATION_ATTITUDE_DEADBAND_E 0 |
| #define | COORDINATED_TURN_AIRSPEED 12.0 |
| Airspeed that will be used in the turning speed calculation (m/s). More... | |
| #define | YAW_DEADBAND_EXCEEDED() |
Functions | |
| static int32_t | get_rc_roll (void) |
| static int32_t | get_rc_pitch (void) |
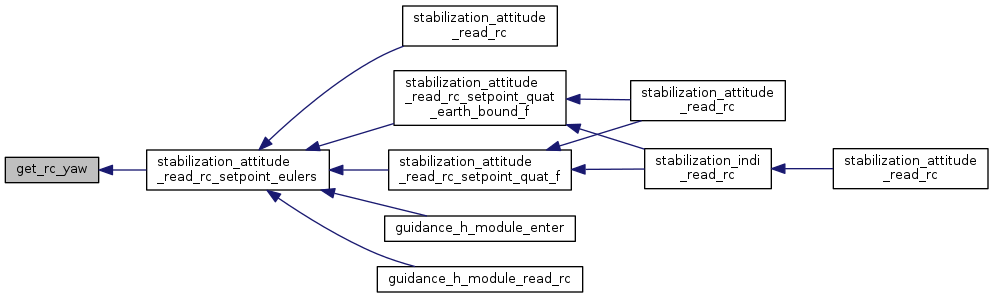
| static int32_t | get_rc_yaw (void) |
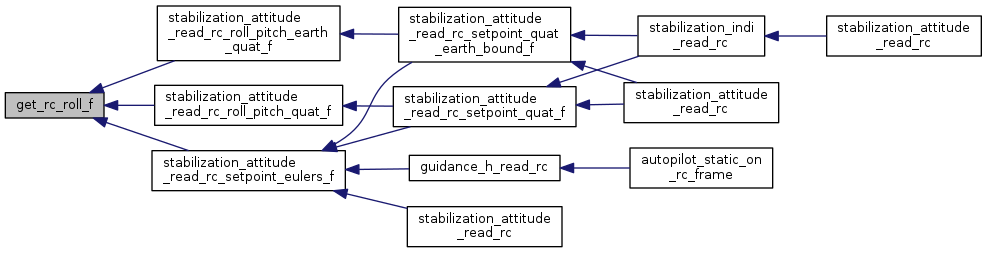
| static float | get_rc_roll_f (void) |
| static float | get_rc_pitch_f (void) |
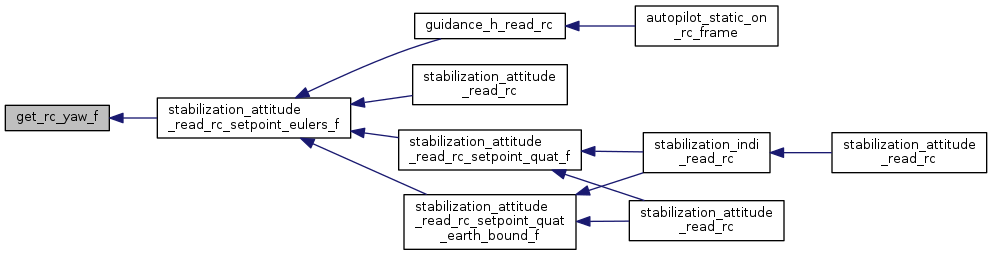
| static float | get_rc_yaw_f (void) |
| void | stabilization_attitude_reset_care_free_heading (void) |
| reset the heading for care-free mode to current heading More... | |
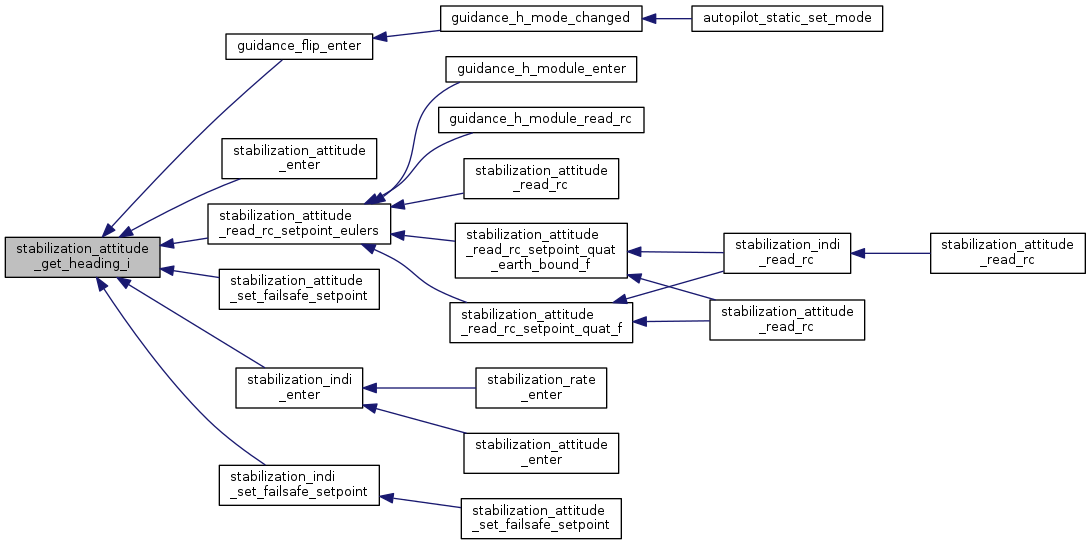
| int32_t | stabilization_attitude_get_heading_i (void) |
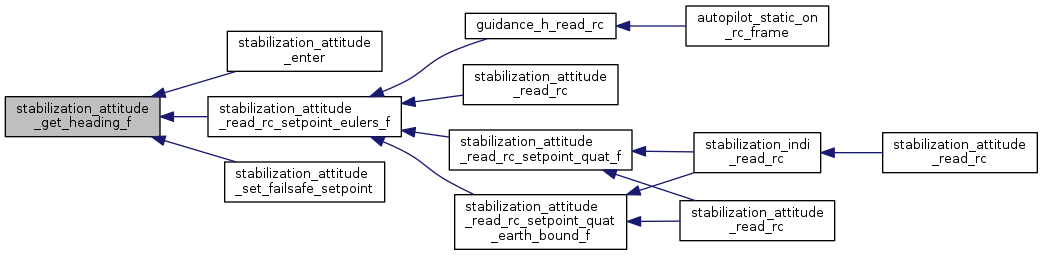
| float | stabilization_attitude_get_heading_f (void) |
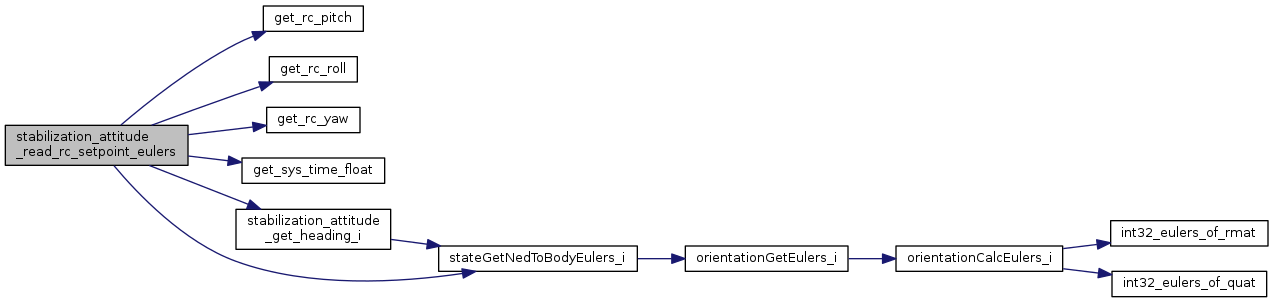
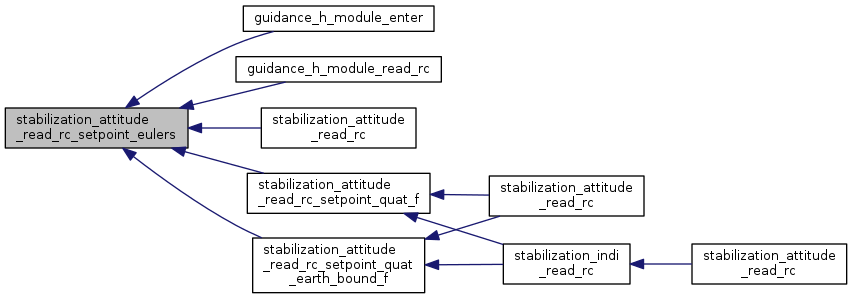
| void | stabilization_attitude_read_rc_setpoint_eulers (struct Int32Eulers *sp, bool in_flight, bool in_carefree, bool coordinated_turn) |
| Read attitude setpoint from RC as euler angles. More... | |
| void | stabilization_attitude_read_rc_setpoint_eulers_f (struct FloatEulers *sp, bool in_flight, bool in_carefree, bool coordinated_turn) |
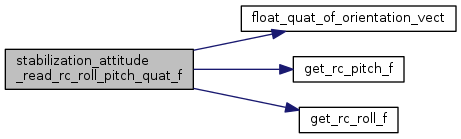
| void | stabilization_attitude_read_rc_roll_pitch_quat_f (struct FloatQuat *q) |
| Read roll/pitch command from RC as quaternion. More... | |
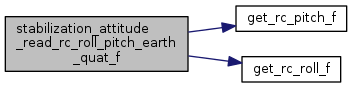
| void | stabilization_attitude_read_rc_roll_pitch_earth_quat_f (struct FloatQuat *q) |
| Read roll/pitch command from RC as quaternion. More... | |
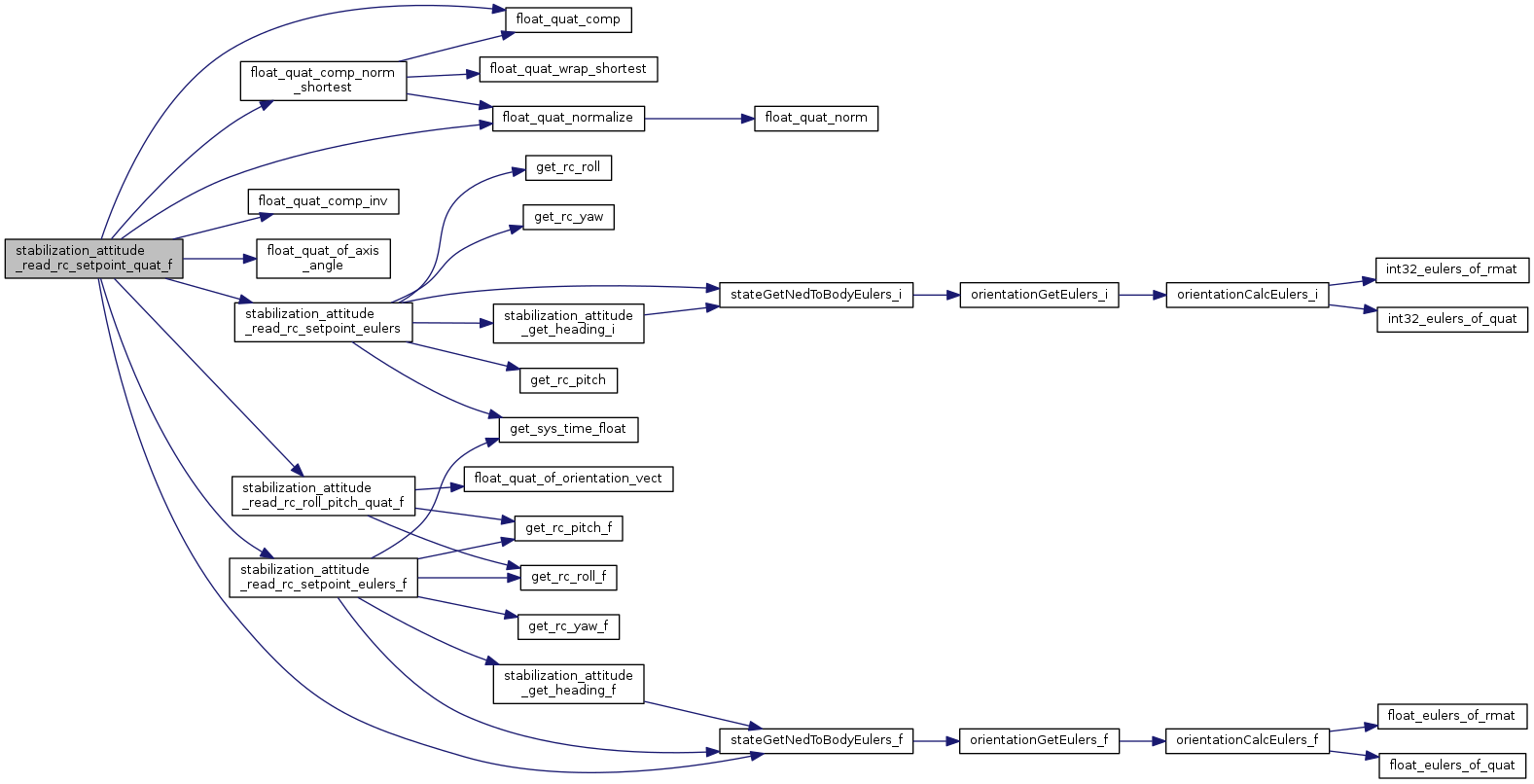
| void | stabilization_attitude_read_rc_setpoint_quat_f (struct FloatQuat *q_sp, bool in_flight, bool in_carefree, bool coordinated_turn) |
| Read attitude setpoint from RC as quaternion Interprets the stick positions as axes. More... | |
| void | stabilization_attitude_read_rc_setpoint_quat_earth_bound_f (struct FloatQuat *q_sp, bool in_flight, bool in_carefree, bool coordinated_turn) |
Variables | |
| float | care_free_heading = 0 |
| int32_t | transition_theta_offset = 0 |
Read an attitude setpoint from the RC.
Definition in file stabilization_attitude_rc_setpoint.c.
| #define COORDINATED_TURN_AIRSPEED 12.0 |
Airspeed that will be used in the turning speed calculation (m/s).
This variable is for calculation of the turn speed, and does not influence the airspeed. With a higher speed, the vehicle will turn less in a turn with the same roll.
Definition at line 50 of file stabilization_attitude_rc_setpoint.c.
Referenced by stabilization_attitude_read_rc_setpoint_eulers(), and stabilization_attitude_read_rc_setpoint_eulers_f().
| #define STABILIZATION_ATTITUDE_DEADBAND_A 0 |
Definition at line 36 of file stabilization_attitude_rc_setpoint.c.
Referenced by get_rc_roll(), and get_rc_roll_f().
| #define STABILIZATION_ATTITUDE_DEADBAND_E 0 |
Definition at line 40 of file stabilization_attitude_rc_setpoint.c.
Referenced by get_rc_pitch(), and get_rc_pitch_f().
| #define YAW_DEADBAND_EXCEEDED | ( | ) |
Definition at line 53 of file stabilization_attitude_rc_setpoint.c.
Referenced by stabilization_attitude_read_rc_setpoint_eulers(), and stabilization_attitude_read_rc_setpoint_eulers_f().
|
static |
Definition at line 72 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_BFP_OF_REAL, MAX_PPRZ, radio_control, RADIO_PITCH, STABILIZATION_ATTITUDE_DEADBAND_E, and RadioControl::values.
Referenced by stabilization_attitude_read_rc_setpoint_eulers().
Here is the caller graph for this function:
|
static |
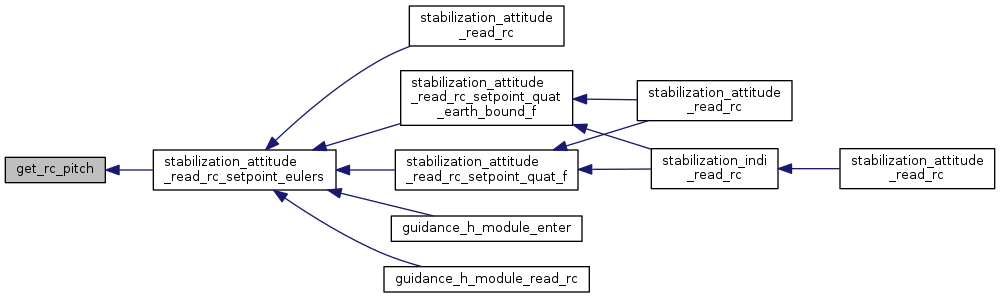
Definition at line 103 of file stabilization_attitude_rc_setpoint.c.
References MAX_PPRZ, radio_control, RADIO_PITCH, STABILIZATION_ATTITUDE_DEADBAND_E, and RadioControl::values.
Referenced by stabilization_attitude_read_rc_roll_pitch_earth_quat_f(), stabilization_attitude_read_rc_roll_pitch_quat_f(), and stabilization_attitude_read_rc_setpoint_eulers_f().
Here is the caller graph for this function:
|
static |
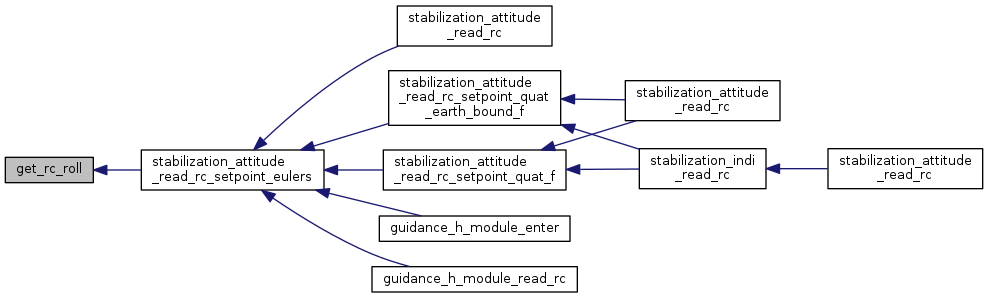
Definition at line 60 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_BFP_OF_REAL, MAX_PPRZ, radio_control, RADIO_ROLL, STABILIZATION_ATTITUDE_DEADBAND_A, and RadioControl::values.
Referenced by stabilization_attitude_read_rc_setpoint_eulers().
Here is the caller graph for this function:
|
static |
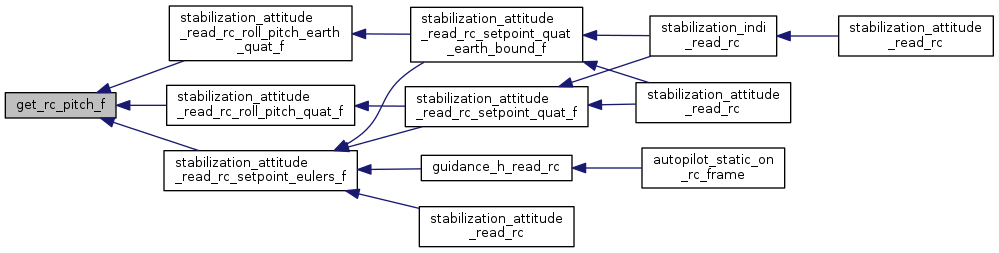
Definition at line 92 of file stabilization_attitude_rc_setpoint.c.
References MAX_PPRZ, radio_control, RADIO_ROLL, STABILIZATION_ATTITUDE_DEADBAND_A, and RadioControl::values.
Referenced by stabilization_attitude_read_rc_roll_pitch_earth_quat_f(), stabilization_attitude_read_rc_roll_pitch_quat_f(), and stabilization_attitude_read_rc_setpoint_eulers_f().
Here is the caller graph for this function:
|
static |
Definition at line 84 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_BFP_OF_REAL, MAX_PPRZ, radio_control, RADIO_YAW, and RadioControl::values.
Referenced by stabilization_attitude_read_rc_setpoint_eulers().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 114 of file stabilization_attitude_rc_setpoint.c.
References MAX_PPRZ, radio_control, RADIO_YAW, and RadioControl::values.
Referenced by stabilization_attitude_read_rc_setpoint_eulers_f().
Here is the caller graph for this function:| float stabilization_attitude_get_heading_f | ( | void | ) |
Definition at line 149 of file stabilization_attitude_rc_setpoint.c.
References heading, FloatEulers::phi, FloatEulers::psi, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by stabilization_attitude_enter(), stabilization_attitude_read_rc_setpoint_eulers_f(), and stabilization_attitude_set_failsafe_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| int32_t stabilization_attitude_get_heading_i | ( | void | ) |
Definition at line 130 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_FLOAT_OF_BFP, heading, INT32_ANGLE_PI_2, INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32Eulers::phi, PPRZ_ITRIG_SIN, Int32Eulers::psi, stateGetNedToBodyEulers_i(), and Int32Eulers::theta.
Referenced by guidance_flip_enter(), stabilization_attitude_enter(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_set_failsafe_setpoint(), stabilization_indi_enter(), and stabilization_indi_set_failsafe_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_read_rc_roll_pitch_earth_quat_f | ( | struct FloatQuat * | q | ) |
Read roll/pitch command from RC as quaternion.
Both angles are are interpreted relative to to the horizontal plane (earth bound).
| [out] | q | quaternion representing the RC roll/pitch input |
Definition at line 347 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_FLOAT_OF_BFP, get_rc_pitch_f(), get_rc_roll_f(), FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and transition_theta_offset.
Referenced by stabilization_attitude_read_rc_setpoint_quat_earth_bound_f().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_read_rc_roll_pitch_quat_f | ( | struct FloatQuat * | q | ) |
Read roll/pitch command from RC as quaternion.
Interprets the stick positions as axes.
| [out] | q | quaternion representing the RC roll/pitch input |
Definition at line 331 of file stabilization_attitude_rc_setpoint.c.
References float_quat_of_orientation_vect(), get_rc_pitch_f(), get_rc_roll_f(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by stabilization_attitude_read_rc_setpoint_quat_f().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_read_rc_setpoint_eulers | ( | struct Int32Eulers * | sp, |
| bool | in_flight, | ||
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Read attitude setpoint from RC as euler angles.
| [in] | coordinated_turn | true if in horizontal mode forward |
| [in] | in_carefree | true if in carefree mode |
| [in] | in_flight | true if in flight |
| [out] | sp | attitude setpoint as euler angles |
Definition at line 173 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_BFP_OF_REAL, ANGLE_FLOAT_OF_BFP, care_free_heading, COORDINATED_TURN_AIRSPEED, get_rc_pitch(), get_rc_roll(), get_rc_yaw(), get_sys_time_float(), heading, INT32_ANGLE_FRAC, INT32_ANGLE_NORMALIZE, INT_MULT_RSHIFT, last_ts, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, stabilization_attitude_get_heading_i(), stateGetNedToBodyEulers_i(), Int32Eulers::theta, THROTTLE_STICK_DOWN, and YAW_DEADBAND_EXCEEDED.
Referenced by guidance_h_module_enter(), guidance_h_module_read_rc(), stabilization_attitude_read_rc(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), and stabilization_attitude_read_rc_setpoint_quat_f().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_read_rc_setpoint_eulers_f | ( | struct FloatEulers * | sp, |
| bool | in_flight, | ||
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
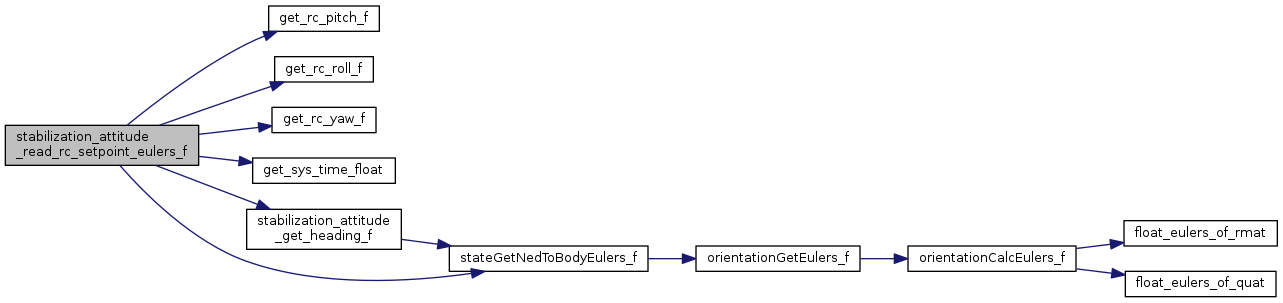
Definition at line 252 of file stabilization_attitude_rc_setpoint.c.
References care_free_heading, COORDINATED_TURN_AIRSPEED, FLOAT_ANGLE_NORMALIZE, get_rc_pitch_f(), get_rc_roll_f(), get_rc_yaw_f(), get_sys_time_float(), heading, last_ts, FloatEulers::phi, FloatEulers::psi, stabilization_attitude_get_heading_f(), stateGetNedToBodyEulers_f(), FloatEulers::theta, THROTTLE_STICK_DOWN, and YAW_DEADBAND_EXCEEDED.
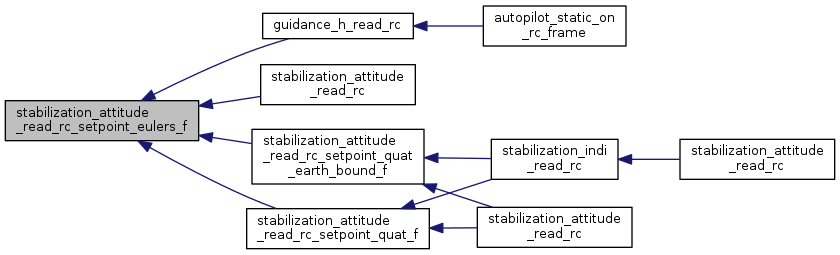
Referenced by guidance_h_read_rc(), stabilization_attitude_read_rc(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), and stabilization_attitude_read_rc_setpoint_quat_f().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_read_rc_setpoint_quat_earth_bound_f | ( | struct FloatQuat * | q_sp, |
| bool | in_flight, | ||
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
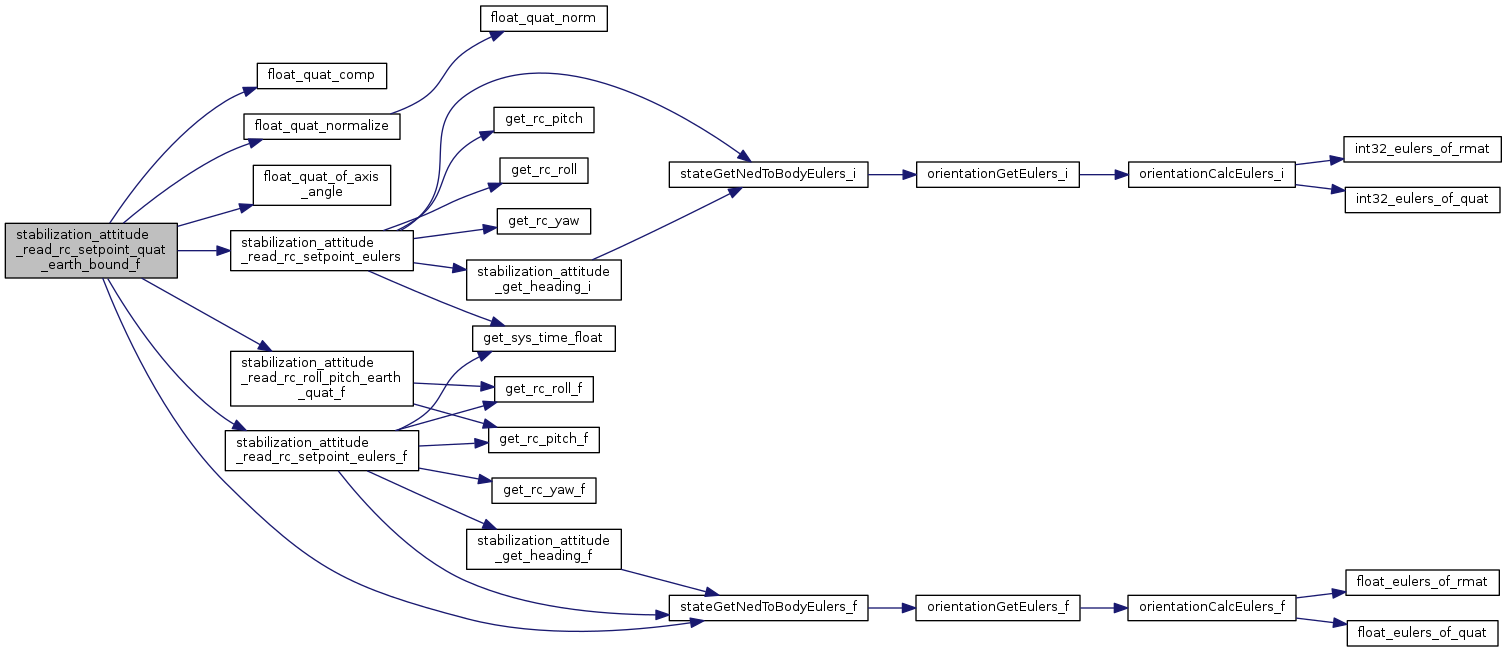
Definition at line 427 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_FLOAT_OF_BFP, float_quat_comp(), float_quat_normalize(), float_quat_of_axis_angle(), FloatEulers::psi, QUAT_COPY, stab_att_sp_euler, stabilization_attitude_read_rc_roll_pitch_earth_quat_f(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_eulers_f(), and stateGetNedToBodyEulers_f().
Referenced by stabilization_attitude_read_rc(), and stabilization_indi_read_rc().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_read_rc_setpoint_quat_f | ( | struct FloatQuat * | q_sp, |
| bool | in_flight, | ||
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Read attitude setpoint from RC as quaternion Interprets the stick positions as axes.
| [in] | coordinated_turn | true if in horizontal mode forward |
| [in] | in_carefree | true if in carefree mode |
| [in] | in_flight | true if in flight |
| [out] | q_sp | attitude setpoint as quaternion |
Definition at line 374 of file stabilization_attitude_rc_setpoint.c.
References ANGLE_FLOAT_OF_BFP, care_free_heading, float_quat_comp(), float_quat_comp_inv(), float_quat_comp_norm_shortest(), float_quat_normalize(), float_quat_of_axis_angle(), FloatEulers::psi, QUAT_COPY, stab_att_sp_euler, stabilization_attitude_read_rc_roll_pitch_quat_f(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_eulers_f(), and stateGetNedToBodyEulers_f().
Referenced by stabilization_attitude_read_rc(), and stabilization_indi_read_rc().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_reset_care_free_heading | ( | void | ) |
reset the heading for care-free mode to current heading
Definition at line 122 of file stabilization_attitude_rc_setpoint.c.
References care_free_heading, FloatEulers::psi, and stateGetNedToBodyEulers_f().
Referenced by guidance_h_mode_changed().
Here is the call graph for this function: Here is the caller graph for this function:| float care_free_heading = 0 |
| int32_t transition_theta_offset = 0 |
Definition at line 58 of file stabilization_attitude_rc_setpoint.c.
Referenced by guidance_h_init(), stabilization_attitude_read_rc_roll_pitch_earth_quat_f(), and transition_run().
 1.8.8
1.8.8