|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Fixed Point Algebra:
Collaboration diagram for Fixed Point Algebra:Data Structures | |
| struct | Uint8Vect3 |
| struct | Int8Vect3 |
| struct | Uint16Vect3 |
| struct | Int16Vect3 |
| struct | Int32Vect2 |
| struct | Int32Vect3 |
| struct | Int32Quat |
| Rotation quaternion. More... | |
| struct | Int64Quat |
| struct | Int16Eulers |
| struct | Int32Eulers |
| euler angles More... | |
| struct | Int32RMat |
| rotation matrix More... | |
| struct | Int32Mat33 |
| struct | Int16Rates |
| struct | Int32Rates |
| angular rates More... | |
| struct | Int64Rates |
| struct | Int64Vect2 |
| struct | Int64Vect3 |
Macros | |
| #define | INT32_POS_FRAC 8 |
| #define | INT32_POS_OF_CM 2.56 |
| #define | INT32_POS_OF_CM_NUM 64 |
| #define | INT32_POS_OF_CM_DEN 25 |
| #define | INT32_SPEED_FRAC 19 |
| #define | INT32_SPEED_OF_CM_S 5242.88 |
| #define | INT32_SPEED_OF_CM_S_NUM 41943 |
| #define | INT32_SPEED_OF_CM_S_DEN 8 |
| #define | INT32_ACCEL_FRAC 10 |
| #define | INT32_MAG_FRAC 11 |
| #define | INT32_PERCENTAGE_FRAC 10 |
| #define | INT32_QUAT_FRAC 15 |
| #define | INT32_ANGLE_FRAC 12 |
| #define | INT32_RATE_FRAC 12 |
| #define | INT32_ANGLE_PI_4 (int32_t)ANGLE_BFP_OF_REAL( 0.7853981633974483096156608458198757) |
| #define | INT32_ANGLE_PI_2 (int32_t)ANGLE_BFP_OF_REAL( 1.5707963267948966192313216916397514) |
| #define | INT32_ANGLE_PI (int32_t)ANGLE_BFP_OF_REAL( 3.1415926535897932384626433832795029) |
| #define | INT32_ANGLE_2_PI (int32_t)ANGLE_BFP_OF_REAL(2.*3.1415926535897932384626433832795029) |
| #define | INT32_RAD_OF_DEG(_deg) (int32_t)(((int64_t)(_deg) * 14964008)/857374503) |
| #define | INT32_DEG_OF_RAD(_rad) (int32_t)(((int64_t)(_rad) * 857374503)/14964008) |
| #define | INT32_ANGLE_NORMALIZE(_a) |
| #define | INT32_COURSE_NORMALIZE(_a) |
| #define | INT32_TRIG_FRAC 14 |
| #define | BFP_OF_REAL(_vr, _frac) ((_vr)*(1<<(_frac))) |
| #define | FLOAT_OF_BFP(_vbfp, _frac) ((float)(_vbfp)/(1<<(_frac))) |
| #define | DOUBLE_OF_BFP(_vbfp, _frac) ((double)(_vbfp)/(1<<(_frac))) |
| #define | RATE_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_RATE_FRAC) |
| #define | RATE_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_RATE_FRAC) |
| #define | ANGLE_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_ANGLE_FRAC) |
| #define | ANGLE_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_ANGLE_FRAC) |
| #define | QUAT1_BFP_OF_REAL(_qf) BFP_OF_REAL((_qf), INT32_QUAT_FRAC) |
| #define | QUAT1_FLOAT_OF_BFP(_qi) FLOAT_OF_BFP((_qi), INT32_QUAT_FRAC) |
| #define | TRIG_BFP_OF_REAL(_tf) BFP_OF_REAL((_tf), INT32_TRIG_FRAC) |
| #define | TRIG_FLOAT_OF_BFP(_ti) FLOAT_OF_BFP((_ti),INT32_TRIG_FRAC) |
| #define | POS_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_POS_FRAC) |
| #define | POS_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_POS_FRAC) |
| #define | SPEED_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_SPEED_FRAC) |
| #define | SPEED_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_SPEED_FRAC) |
| #define | ACCEL_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_ACCEL_FRAC) |
| #define | ACCEL_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_ACCEL_FRAC) |
| #define | MAG_BFP_OF_REAL(_af) BFP_OF_REAL((_af), INT32_MAG_FRAC) |
| #define | MAG_FLOAT_OF_BFP(_ai) FLOAT_OF_BFP((_ai), INT32_MAG_FRAC) |
| #define | INT_MULT_RSHIFT(_a, _b, _r) (((_a)*(_b))>>(_r)) |
| #define | INT32_SQRT(_out, _in) WARNING("INT32_SQRT macro is deprecated, use the lower case function instead") { _out = int32_sqrt(_in); } |
| #define | INT_VECT2_ZERO(_v) VECT2_ASSIGN(_v, 0, 0) |
| #define | INT32_VECT2_NORM(_v) int32_sqrt(VECT2_NORM2(_v)) |
| #define | INT32_VECT2_NORMALIZE(_v, _frac) WARNING("INT32_VECT2_NORMALIZE macro is deprecated, use the lower case function instead") int32_vect2_normalize(&(_v), _frac) |
| #define | INT32_VECT2_RSHIFT(_o, _i, _r) |
| #define | INT32_VECT2_LSHIFT(_o, _i, _l) |
| #define | INT32_VECT2_SCALE_2(_a, _b, _num, _den) |
| #define | INT_VECT3_ZERO(_v) VECT3_ASSIGN(_v, 0, 0, 0) |
| #define | INT32_VECT3_ZERO(_v) VECT3_ASSIGN(_v, 0, 0, 0) |
| #define | INT32_VECT3_SCALE_2(_a, _b, _num, _den) |
| #define | INT32_VECT3_NORM(_v) int32_sqrt(VECT3_NORM2(_v)) |
| #define | INT32_VECT3_RSHIFT(_o, _i, _r) |
| #define | INT32_VECT3_LSHIFT(_o, _i, _l) |
| #define | INT32_MAT33_ZERO(_m) |
| #define | INT32_MAT33_DIAG(_m, _d00, _d11, _d22) |
| #define | int32_rmat_of_eulers int32_rmat_of_eulers_321 |
| Rotation matrix from Euler angles. More... | |
| #define | INT32_RMAT_COMP(_m_a2c, _m_a2b, _m_b2c) WARNING("INT32_RMAT_COMP macro is deprecated, use the lower case function instead") int32_rmat_comp(&(_m_a2c), &(_m_a2b), &(_m_b2c)) |
| #define | INT32_RMAT_COMP_INV(_m_a2b, _m_a2c, _m_b2c) WARNING("INT32_RMAT_COMP_INV macro is deprecated, use the lower case function instead") int32_rmat_comp_inv(&(_m_a2b), &(_m_a2c), &(_m_b2c)) |
| #define | INT32_RMAT_VMULT(_vb, _m_a2b, _va) WARNING("INT32_RMAT_VMULT macro is deprecated, use the lower case function instead") int32_rmat_vmult(&(_vb), &(_m_a2b), &(_va)) |
| #define | INT32_RMAT_TRANSP_VMULT(_vb, _m_b2a, _va) WARNING("INT32_RMAT_TRANSP_VMULT macro is deprecated, use the lower case function instead") int32_rmat_transp_vmult(&(_vb), &(_m_b2a), &(_va)) |
| #define | INT32_RMAT_RATEMULT(_rb, _m_a2b, _ra) WARNING("INT32_RMAT_RATEMULT macro is deprecated, use the lower case function instead") int32_rmat_ratemult(&(_rb), &(_m_a2b), &(_ra)) |
| #define | INT32_RMAT_TRANSP_RATEMULT(_rb, _m_b2a, _ra) WARNING("INT32_RMAT_TRANSP_RATEMULT macro is deprecated, use the lower case function instead") int32_rmat_ratemult(&(_rb), &(_m_b2a), &(_ra)) |
| #define | INT32_RMAT_OF_QUAT(_rm, _q) WARNING("INT32_RMAT_OF_QUAT macro is deprecated, use the lower case function instead") int32_rmat_of_quat(&(_rm), &(_q)) |
| #define | INT32_RMAT_OF_EULERS(_rm, _e) WARNING("INT32_RMAT_OF_EULERS macro is deprecated, use the lower case function instead") int32_rmat_of_eulers_321(&(_rm), &(_e)) |
| #define | INT32_RMAT_OF_EULERS_321(_rm, _e) WARNING("INT32_RMAT_OF_EULERS_321 macro is deprecated, use the lower case function instead") int32_rmat_of_eulers_321(&(_rm), &(_e)) |
| #define | INT32_RMAT_OF_EULERS_312(_rm, _e) WARNING("INT32_RMAT_OF_EULERS_312 macro is deprecated, use the lower case function instead") int32_rmat_of_eulers_312(&(_rm), &(_e)) |
| #define | INT32_QUAT_ZERO(_q) WARNING("INT32_QUAT_ZERO macro is deprecated, use the lower case function instead") int32_quat_identity(&(_q)) |
| #define | INT32_QUAT_NORM(n, q) WARNING("INT32_QUAT_NORM macro is deprecated, use the lower case function instead") { n = int32_quat_norm(&(q)); } |
| #define | INT32_QUAT_WRAP_SHORTEST(q) WARNING("INT32_QUAT_WRAP_SHORTEST macro is deprecated, use the lower case function instead") int32_quat_wrap_shortest(&(q)) |
| #define | INT32_QUAT_NORMALIZE(q) WARNING("INT32_QUAT_NORMALIZE macro is deprecated, use the lower case function instead") int32_quat_normalize(&(q)) |
| #define | INT32_QUAT_COMP(_a2c, _a2b, _b2c) WARNING("INT32_QUAT_COMP macro is deprecated, use the lower case function instead") int32_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
| #define | INT32_QUAT_COMP_INV(_a2b, _a2c, _b2c) WARNING("INT32_QUAT_COMP_INV macro is deprecated, use the lower case function instead") int32_quat_comp_inv(&(_a2b), &(_a2c), &(_b2c)) |
| #define | INT32_QUAT_INV_COMP(_b2c, _a2b, _a2c) WARNING("INT32_QUAT_INV_COMP macro is deprecated, use the lower case function instead") int32_quat_inv_comp(&(_b2c), &(_a2b), &(_a2c)) |
| #define | INT32_QUAT_COMP_NORM_SHORTEST(_a2c, _a2b, _b2c) WARNING("INT32_QUAT_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") int32_quat_comp_norm_shortest(&(_a2c), &(_a2b), &(_b2c)) |
| #define | INT32_QUAT_INV_COMP_NORM_SHORTEST(_b2c, _a2b, _a2c) WARNING("INT32_QUAT_INV_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") int32_quat_inv_comp_norm_shortest(&(_b2c), &(_a2b), &(_a2c)) |
| #define | INT32_QUAT_DERIVATIVE(_qd, _r, _q) WARNING("INT32_QUAT_DERIVATIVE macro is deprecated, use the lower case function instead") int32_quat_derivative(&(_qd), &(_r), &(_q)) |
| #define | INT32_QUAT_INTEGRATE_FI(_q, _hr, _omega, _f) WARNING("INT32_QUAT_INTEGRATE_FI macro is deprecated, use the lower case function instead") int32_quat_integrate_fi(&(_q), &(_hr), &(_omega), _f) |
| #define | INT32_QUAT_VMULT(v_out, q, v_in) WARNING("INT32_QUAT_VMULT macro is deprecated, use the lower case function instead") int32_quat_vmult(&(v_out), &(q), &(v_in)) |
| #define | INT32_QUAT_OF_EULERS(_q, _e) WARNING("INT32_QUAT_OF_EULERS macro is deprecated, use the lower case function instead") int32_quat_of_eulers(&(_q), &(_e)) |
| #define | INT32_QUAT_OF_AXIS_ANGLE(_q, _uv, _an) WARNING("INT32_QUAT_OF_AXIS_ANGLE macro is deprecated, use the lower case function instead") int32_quat_of_axis_angle(&(_q), &(_uv), _an) |
| #define | INT32_QUAT_OF_RMAT(_q, _r) WARNING("INT32_QUAT_OF_RMAT macro is deprecated, use the lower case function instead") int32_quat_of_rmat(&(_q), &(_r)) |
| #define | INT_EULERS_ZERO(_e) EULERS_ASSIGN(_e, 0, 0, 0) |
| #define | INT32_EULERS_OF_RMAT(_e, _rm) WARNING("INT32_EULERS_OF_RMAT macro is deprecated, use the lower case function instead") int32_eulers_of_rmat(&(_e), &(_rm)) |
| #define | INT32_EULERS_OF_QUAT(_e, _q) WARNING("INT32_EULERS_OF_QUAT macro is deprecated, use the lower case function instead") int32_eulers_of_quat(&(_e), &(_q)) |
| #define | INT32_EULERS_LSHIFT(_o, _i, _r) |
| #define | INT32_EULERS_RSHIFT(_o, _i, _r) |
| #define | INT_RATES_ZERO(_e) RATES_ASSIGN(_e, 0, 0, 0) |
| #define | INT_RATES_RSHIFT(_o, _i, _r) |
| #define | INT_RATES_LSHIFT(_o, _i, _r) |
| #define | int32_eulers_dot_of_rates int32_eulers_dot_321_of_rates |
| #define | INT32_RATES_OF_EULERS_DOT_321(_r, _e, _ed) WARNING("INT32_RATES_OF_EULERS_DOT_321 macro is deprecated, use the lower case function instead") int32_rates_of_eulers_dot_321(&(_r), &(_e), &(_ed)) |
| #define | INT32_RATES_OF_EULERS_DOT(_r, _e, _ed) WARNING("INT32_RATES_OF_EULERS_DOT macro is deprecated, use the lower case function instead") int32_rates_of_eulers_dot_321(&(_r), &(_e), &(_ed)) |
| #define | INT32_EULERS_DOT_321_OF_RATES(_ed, _e, _r) WARNING("INT32_EULERS_DOT_321_OF_RATES macro is deprecated, use the lower case function instead") int32_eulers_dot_321_of_rates(&(_ed), &(_e), &(_r)) |
| #define | INT32_EULERS_DOT_OF_RATES(_ed, _e, _r) WARNING("INT32_EULERS_DOT_OF_RATES macro is deprecated, use the lower case function instead") int32_eulers_dot_321_of_rates(&(_ed), &(_e), &(_r)) |
Functions | |
| uint32_t | int32_sqrt (uint32_t in) |
| uint32_t | int32_gcd (uint32_t a, uint32_t b) |
| static uint32_t | int32_vect2_norm2 (struct Int32Vect2 *v) |
| return squared norm of 2D vector More... | |
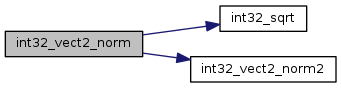
| static uint32_t | int32_vect2_norm (struct Int32Vect2 *v) |
| return norm of 2D vector More... | |
| static void | int32_vect2_normalize (struct Int32Vect2 *v, uint8_t frac) |
| normalize 2D vector inplace More... | |
| static void | int32_rmat_identity (struct Int32RMat *rm) |
| initialises a rotation matrix to identity More... | |
| void | int32_rmat_comp (struct Int32RMat *m_a2c, struct Int32RMat *m_a2b, struct Int32RMat *m_b2c) |
| Composition (multiplication) of two rotation matrices. More... | |
| void | int32_rmat_comp_inv (struct Int32RMat *m_a2b, struct Int32RMat *m_a2c, struct Int32RMat *m_b2c) |
| Composition (multiplication) of two rotation matrices. More... | |
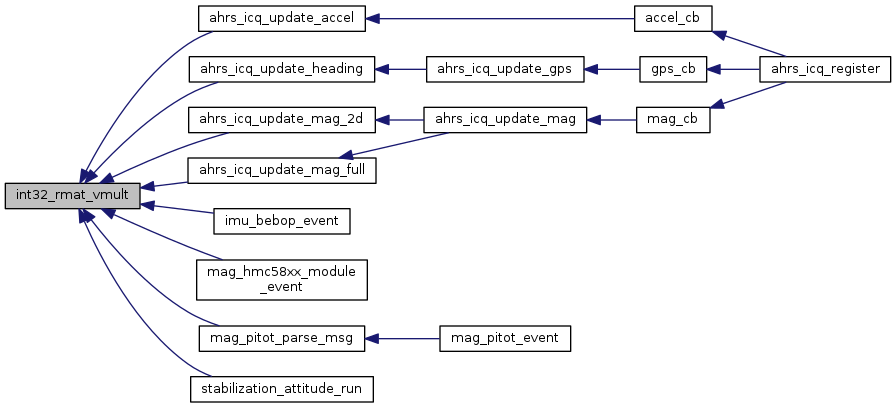
| void | int32_rmat_vmult (struct Int32Vect3 *vb, struct Int32RMat *m_a2b, struct Int32Vect3 *va) |
| rotate 3D vector by rotation matrix. More... | |
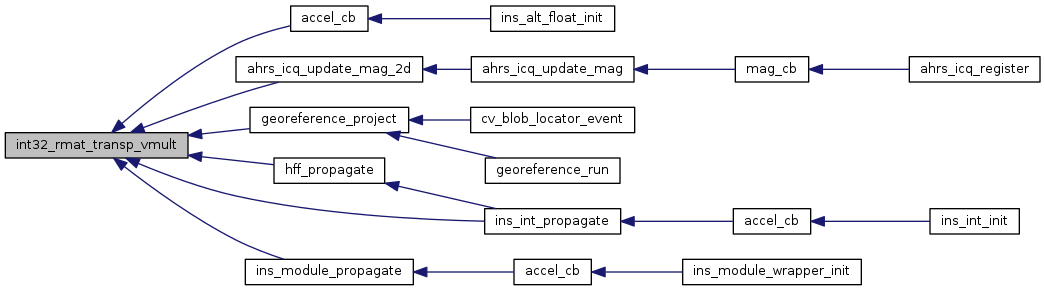
| void | int32_rmat_transp_vmult (struct Int32Vect3 *vb, struct Int32RMat *m_b2a, struct Int32Vect3 *va) |
| rotate 3D vector by transposed rotation matrix. More... | |
| void | int32_rmat_ratemult (struct Int32Rates *rb, struct Int32RMat *m_a2b, struct Int32Rates *ra) |
| rotate anglular rates by rotation matrix. More... | |
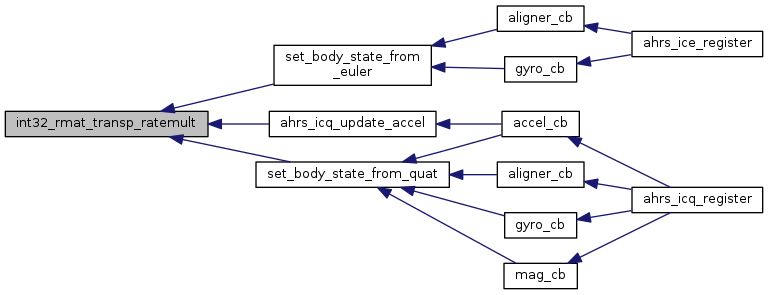
| void | int32_rmat_transp_ratemult (struct Int32Rates *rb, struct Int32RMat *m_b2a, struct Int32Rates *ra) |
| rotate anglular rates by transposed rotation matrix. More... | |
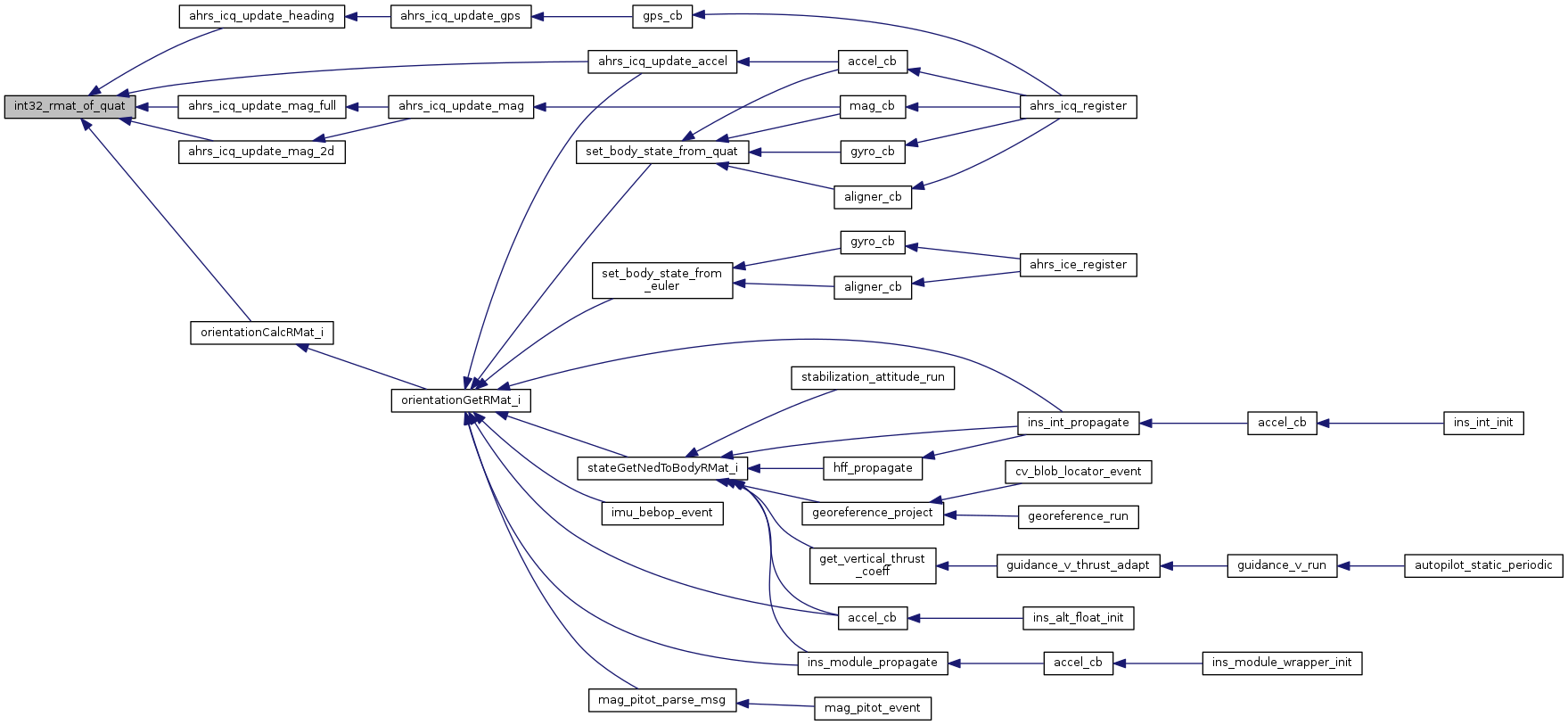
| void | int32_rmat_of_quat (struct Int32RMat *rm, struct Int32Quat *q) |
| Convert unit quaternion to rotation matrix. More... | |
| void | int32_rmat_of_eulers_321 (struct Int32RMat *rm, struct Int32Eulers *e) |
| Rotation matrix from 321 Euler angles (int). More... | |
| void | int32_rmat_of_eulers_312 (struct Int32RMat *rm, struct Int32Eulers *e) |
| Rotation matrix from 312 Euler angles. More... | |
| static void | int32_quat_identity (struct Int32Quat *q) |
| initialises a quaternion to identity More... | |
| static uint32_t | int32_quat_norm (struct Int32Quat *q) |
| Norm of a quaternion. More... | |
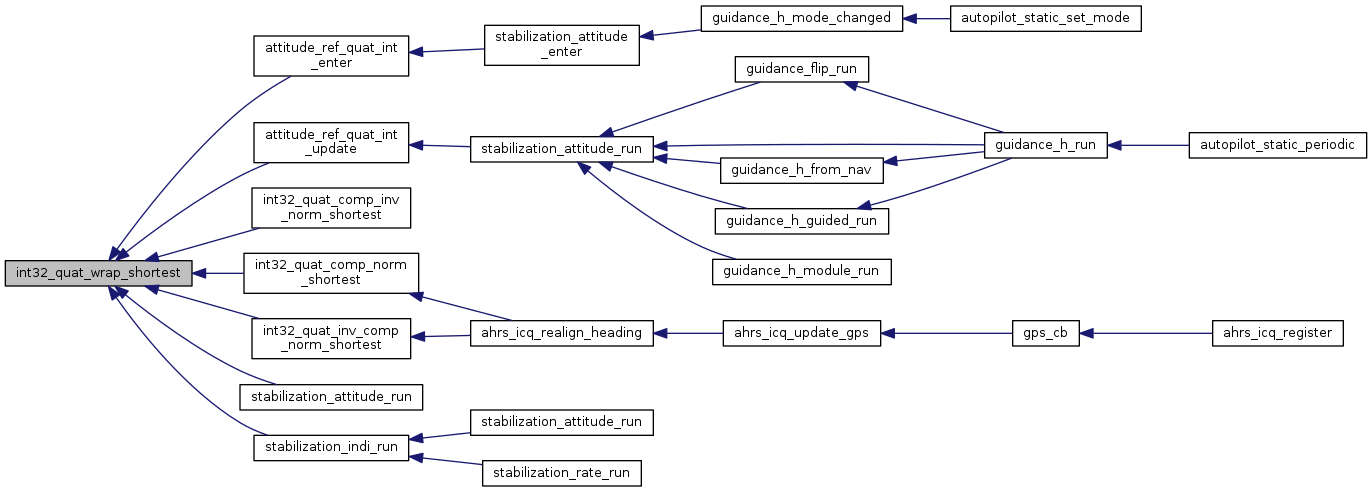
| static void | int32_quat_wrap_shortest (struct Int32Quat *q) |
| static void | int32_quat_normalize (struct Int32Quat *q) |
| normalize a quaternion inplace More... | |
| void | int32_quat_comp (struct Int32Quat *a2c, struct Int32Quat *a2b, struct Int32Quat *b2c) |
| Composition (multiplication) of two quaternions. More... | |
| void | int32_quat_comp_inv (struct Int32Quat *a2b, struct Int32Quat *a2c, struct Int32Quat *b2c) |
| Composition (multiplication) of two quaternions. More... | |
| void | int32_quat_inv_comp (struct Int32Quat *b2c, struct Int32Quat *a2b, struct Int32Quat *a2c) |
| Composition (multiplication) of two quaternions. More... | |
| void | int32_quat_comp_norm_shortest (struct Int32Quat *a2c, struct Int32Quat *a2b, struct Int32Quat *b2c) |
| Composition (multiplication) of two quaternions with normalization. More... | |
| void | int32_quat_comp_inv_norm_shortest (struct Int32Quat *a2b, struct Int32Quat *a2c, struct Int32Quat *b2c) |
| Composition (multiplication) of two quaternions with normalization. More... | |
| void | int32_quat_inv_comp_norm_shortest (struct Int32Quat *b2c, struct Int32Quat *a2b, struct Int32Quat *a2c) |
| Composition (multiplication) of two quaternions with normalization. More... | |
| void | int32_quat_derivative (struct Int32Quat *qd, const struct Int32Rates *r, struct Int32Quat *q) |
| Quaternion derivative from rotational velocity. More... | |
| void | int32_quat_integrate_fi (struct Int32Quat *q, struct Int64Quat *hr, struct Int32Rates *omega, int freq) |
| in place quaternion first order integration with constant rotational velocity. More... | |
| void | int32_quat_vmult (struct Int32Vect3 *v_out, struct Int32Quat *q, struct Int32Vect3 *v_in) |
| rotate 3D vector by quaternion. More... | |
| void | int32_quat_of_eulers (struct Int32Quat *q, struct Int32Eulers *e) |
| Quaternion from Euler angles. More... | |
| void | int32_quat_of_axis_angle (struct Int32Quat *q, struct Int32Vect3 *uv, int32_t angle) |
| Quaternion from unit vector and angle. More... | |
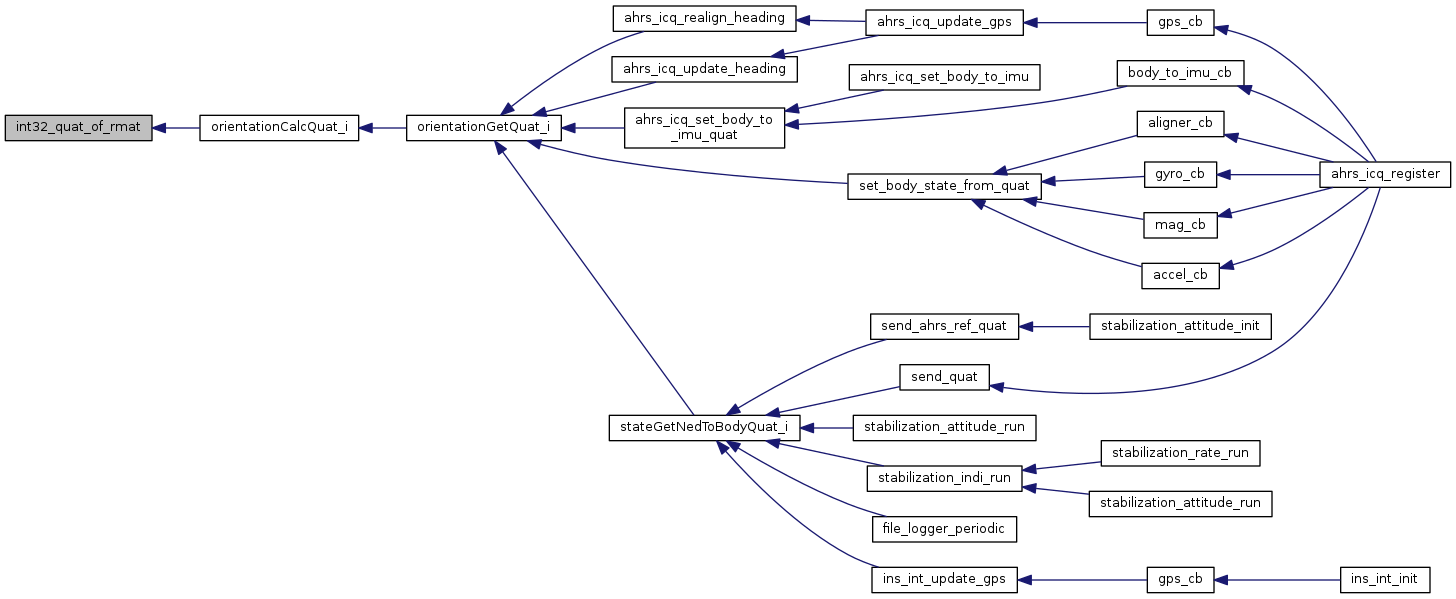
| void | int32_quat_of_rmat (struct Int32Quat *q, struct Int32RMat *r) |
| Quaternion from rotation matrix. More... | |
| void | int32_eulers_of_rmat (struct Int32Eulers *e, struct Int32RMat *rm) |
| void | int32_eulers_of_quat (struct Int32Eulers *e, struct Int32Quat *q) |
| void | int32_rates_of_eulers_dot_321 (struct Int32Rates *r, struct Int32Eulers *e, struct Int32Eulers *ed) |
| void | int32_eulers_dot_321_of_rates (struct Int32Eulers *ed, struct Int32Eulers *e, struct Int32Rates *r) |
| static void | int32_vect_zero (int32_t *a, const int n) |
| a = 0 More... | |
| static void | int32_vect_set_value (int32_t *a, const int32_t v, const int n) |
| a = v * ones(n,1) More... | |
| static void | int32_vect_copy (int32_t *a, const int32_t *b, const int n) |
| a = b More... | |
| static void | int32_vect_sum (int32_t *o, const int32_t *a, const int32_t *b, const int n) |
| o = a + b More... | |
| static void | int32_vect_diff (int32_t *o, const int32_t *a, const int32_t *b, const int n) |
| o = a - b More... | |
| static void | int32_vect_mul (int32_t *o, const int32_t *a, const int32_t *b, const int n) |
| o = a * b (element wise) More... | |
| static void | int32_vect_add (int32_t *a, const int32_t *b, const int n) |
| a += b More... | |
| static void | int32_vect_sub (int32_t *a, const int32_t *b, const int n) |
| a -= b More... | |
| static void | int32_vect_smul (int32_t *o, const int32_t *a, const int32_t s, const int n) |
| o = a * s More... | |
| static bool | int32_vect_find (const int32_t *a, const int32_t s, int *loc, const int n) |
| Find value s in array a. More... | |
| static void | int32_mat_mul (int32_t **o, int32_t **a, int32_t **b, int m, int n, int l) |
| o = a * b More... | |
| struct Uint8Vect3 |
Definition at line 44 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| uint8_t | x | |
| uint8_t | y | |
| uint8_t | z | |
| struct Int8Vect3 |
Definition at line 50 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int8_t | x | |
| int8_t | y | |
| int8_t | z | |
| struct Uint16Vect3 |
Definition at line 56 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| uint16_t | x | |
| uint16_t | y | |
| uint16_t | z | |
| struct Int16Vect3 |
Definition at line 62 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int16_t | x | |
| int16_t | y | |
| int16_t | z | |
| struct Int32Vect2 |
Definition at line 83 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | x | |
| int32_t | y | |
| struct Int32Vect3 |
Definition at line 88 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | x | |
| int32_t | y | |
| int32_t | z | |
| struct Int32Quat |
Rotation quaternion.
Units: BFP with INT32_QUAT_FRAC
Definition at line 99 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | qi | |
| int32_t | qx | |
| int32_t | qy | |
| int32_t | qz | |
| struct Int64Quat |
| struct Int16Eulers |
Definition at line 137 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int16_t | phi | |
| int16_t | psi | |
| int16_t | theta | |
| struct Int32Eulers |
euler angles
Units: rad in BFP with INT32_ANGLE_FRAC
Definition at line 146 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | phi | in rad with INT32_ANGLE_FRAC |
| int32_t | psi | in rad with INT32_ANGLE_FRAC |
| int32_t | theta | in rad with INT32_ANGLE_FRAC |
| struct Int32RMat |
rotation matrix
Units: rad in BFP with INT32_TRIG_FRAC
Definition at line 159 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | m[3 *3] | |
| struct Int32Mat33 |
Definition at line 164 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | m[3 *3] | |
| struct Int16Rates |
Definition at line 169 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int16_t | p | |
| int16_t | q | |
| int16_t | r | |
| struct Int32Rates |
angular rates
Units: rad/s in BFP with INT32_RATE_FRAC
Definition at line 179 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int32_t | p | in rad/s with INT32_RATE_FRAC |
| int32_t | q | in rad/s with INT32_RATE_FRAC |
| int32_t | r | in rad/s with INT32_RATE_FRAC |
| struct Int64Rates |
Definition at line 185 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int64_t | p | |
| int64_t | q | |
| int64_t | r | |
| struct Int64Vect2 |
Definition at line 192 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int64_t | x | |
| int64_t | y | |
| struct Int64Vect3 |
Definition at line 197 of file pprz_algebra_int.h.
| Data Fields | ||
|---|---|---|
| int64_t | x | |
| int64_t | y | |
| int64_t | z | |
| #define ACCEL_BFP_OF_REAL | ( | _af | ) | BFP_OF_REAL((_af), INT32_ACCEL_FRAC) |
Definition at line 220 of file pprz_algebra_int.h.
Referenced by accel_cb(), gv_adapt_run(), handle_ins_msg(), ins_int_propagate(), and ins_update_from_vff().
| #define ACCEL_FLOAT_OF_BFP | ( | _ai | ) | FLOAT_OF_BFP((_ai), INT32_ACCEL_FRAC) |
Definition at line 221 of file pprz_algebra_int.h.
Referenced by accel_cb(), ArduIMU_event(), calibrate_coeff(), calibrate_zero(), hff_propagate(), ins_int_propagate(), and wind_estimator_periodic().
| #define ANGLE_BFP_OF_REAL | ( | _af | ) | BFP_OF_REAL((_af), INT32_ANGLE_FRAC) |
Definition at line 210 of file pprz_algebra_int.h.
Referenced by ahrs_int_get_euler_from_accel_mag(), get_rc_pitch(), get_rc_roll(), get_rc_yaw(), gh_compute_route_ref(), guidance_flip_run(), guidance_h_from_nav(), guidance_h_guided_run(), guidance_h_module_run(), guidance_h_traj_run(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_vertical(), increase_nav_heading(), int32_atan2_2(), int32_eulers_of_quat(), int32_eulers_of_rmat(), mag_hmc58xx_module_init(), nav_oval(), nav_set_heading_rad(), nav_set_heading_towards(), OA_update(), object_tracking_run(), pprz_itrig_sin(), send_fp(), stabilization_attitude_init(), stabilization_attitude_read_rc_setpoint_eulers(), and transition_run().
| #define ANGLE_FLOAT_OF_BFP | ( | _ai | ) | FLOAT_OF_BFP((_ai), INT32_ANGLE_FRAC) |
Definition at line 211 of file pprz_algebra_int.h.
Referenced by ArduIMU_event(), calculateForwards(), guidance_h_from_nav(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_set_cmd_i(), increase_nav_heading(), object_tracking_run(), pprz_itrig_sin(), quat_from_earth_cmd_i(), run_avoid_navigation_onvision(), stabilization_attitude_get_heading_i(), stabilization_attitude_read_rc_roll_pitch_earth_quat_f(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), stabilization_attitude_set_earth_cmd_i(), and stereocam_droplet_periodic().
| #define BFP_OF_REAL | ( | _vr, | |
| _frac | |||
| ) | ((_vr)*(1<<(_frac))) |
Definition at line 205 of file pprz_algebra_int.h.
Referenced by attitude_ref_quat_int_set_max_p(), attitude_ref_quat_int_set_max_pdot(), attitude_ref_quat_int_set_max_q(), attitude_ref_quat_int_set_max_qdot(), attitude_ref_quat_int_set_max_r(), attitude_ref_quat_int_set_max_rdot(), computeOptiTrack(), gain_scheduling_periodic(), get_vertical_thrust_coeff(), gh_ref_init(), gh_set_max_speed(), gh_set_omega(), gh_set_tau(), gh_set_zeta(), guidance_flip_run(), guidance_h_traj_run(), guidance_v_init(), gv_adapt_run(), horizontal_ctrl_module_run(), init_second_order_low_pass_int(), int32_vect2_normalize(), ltp_of_ecef_rmat_from_lla_i(), run_hover_loop(), update_ref_model_p(), update_ref_model_q(), and update_ref_model_r().
| #define DOUBLE_OF_BFP | ( | _vbfp, | |
| _frac | |||
| ) | ((double)(_vbfp)/(1<<(_frac))) |
Definition at line 207 of file pprz_algebra_int.h.
| #define FLOAT_OF_BFP | ( | _vbfp, | |
| _frac | |||
| ) | ((float)(_vbfp)/(1<<(_frac))) |
Definition at line 206 of file pprz_algebra_int.h.
Referenced by ctrl_eff_scheduling_periodic(), gain_scheduling_periodic(), and reset_horizontal_vars().
| #define INT32_ACCEL_FRAC 10 |
Definition at line 78 of file pprz_algebra_int.h.
Referenced by gh_set_ref(), guidance_h_traj_run(), guidance_h_update_reference(), gv_adapt_run(), gv_set_ref(), and run_hover_loop().
| #define INT32_ANGLE_2_PI (int32_t)ANGLE_BFP_OF_REAL(2.*3.1415926535897932384626433832795029) |
Definition at line 121 of file pprz_algebra_int.h.
| #define INT32_ANGLE_FRAC 12 |
Definition at line 116 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_gps(), ahrs_icq_update_heading(), attitude_ref_euler_int_update(), computeOptiTrack(), get_psi_measurement_from_mag(), guidance_h_traj_run(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_reset_heading(), horizontal_ctrl_module_run(), int32_atan2_2(), nav_circle(), reset_horizontal_vars(), reset_psi_ref_from_body(), send_att_ref(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_run(), and transition_run().
| #define INT32_ANGLE_NORMALIZE | ( | _a | ) |
Definition at line 126 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_heading(), ahrs_int_get_euler_from_accel_mag(), increase_nav_heading(), nav_circle(), OA_update(), pprz_itrig_sin(), stabilization_attitude_read_rc_setpoint_eulers(), and stabilization_attitude_run().
| #define INT32_ANGLE_PI (int32_t)ANGLE_BFP_OF_REAL( 3.1415926535897932384626433832795029) |
Definition at line 120 of file pprz_algebra_int.h.
Referenced by guidance_hybrid_airspeed_to_attitude(), nav_circle(), nav_oval(), and pprz_itrig_sin().
| #define INT32_ANGLE_PI_2 (int32_t)ANGLE_BFP_OF_REAL( 1.5707963267948966192313216916397514) |
Definition at line 119 of file pprz_algebra_int.h.
Referenced by guidance_h_traj_run(), pprz_itrig_cos(), pprz_itrig_sin(), and stabilization_attitude_get_heading_i().
| #define INT32_ANGLE_PI_4 (int32_t)ANGLE_BFP_OF_REAL( 0.7853981633974483096156608458198757) |
Definition at line 118 of file pprz_algebra_int.h.
Referenced by int32_atan2(), int32_atan2_2(), and nav_circle().
| #define INT32_COURSE_NORMALIZE | ( | _a | ) |
Definition at line 131 of file pprz_algebra_int.h.
Referenced by nav_set_heading_rad(), navigation_update_wp_from_speed(), object_tracking_run(), rotorcraft_cam_periodic(), and stateCalcHorizontalSpeedDir_i().
Definition at line 124 of file pprz_algebra_int.h.
Referenced by nav_oval().
| #define INT32_EULERS_DOT_321_OF_RATES | ( | _ed, | |
| _e, | |||
| _r | |||
| ) | WARNING("INT32_EULERS_DOT_321_OF_RATES macro is deprecated, use the lower case function instead") int32_eulers_dot_321_of_rates(&(_ed), &(_e), &(_r)) |
Definition at line 598 of file pprz_algebra_int.h.
| #define int32_eulers_dot_of_rates int32_eulers_dot_321_of_rates |
Definition at line 593 of file pprz_algebra_int.h.
Referenced by ahrs_ice_propagate().
| #define INT32_EULERS_DOT_OF_RATES | ( | _ed, | |
| _e, | |||
| _r | |||
| ) | WARNING("INT32_EULERS_DOT_OF_RATES macro is deprecated, use the lower case function instead") int32_eulers_dot_321_of_rates(&(_ed), &(_e), &(_r)) |
Definition at line 599 of file pprz_algebra_int.h.
| #define INT32_EULERS_LSHIFT | ( | _o, | |
| _i, | |||
| _r | |||
| ) |
Definition at line 558 of file pprz_algebra_int.h.
Referenced by attitude_ref_euler_int_update(), send_att_ref(), and stabilization_attitude_run().
| #define INT32_EULERS_OF_QUAT | ( | _e, | |
| _q | |||
| ) | WARNING("INT32_EULERS_OF_QUAT macro is deprecated, use the lower case function instead") int32_eulers_of_quat(&(_e), &(_q)) |
Definition at line 556 of file pprz_algebra_int.h.
| #define INT32_EULERS_OF_RMAT | ( | _e, | |
| _rm | |||
| ) | WARNING("INT32_EULERS_OF_RMAT macro is deprecated, use the lower case function instead") int32_eulers_of_rmat(&(_e), &(_rm)) |
Definition at line 555 of file pprz_algebra_int.h.
| #define INT32_EULERS_RSHIFT | ( | _o, | |
| _i, | |||
| _r | |||
| ) |
Definition at line 564 of file pprz_algebra_int.h.
| #define INT32_MAG_FRAC 11 |
Definition at line 79 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_mag_2d().
| #define INT32_MAT33_DIAG | ( | _m, | |
| _d00, | |||
| _d11, | |||
| _d22 | |||
| ) |
Definition at line 327 of file pprz_algebra_int.h.
Referenced by int32_rmat_identity().
| #define INT32_MAT33_ZERO | ( | _m | ) |
Definition at line 315 of file pprz_algebra_int.h.
Referenced by georeference_project().
| #define INT32_PERCENTAGE_FRAC 10 |
Definition at line 81 of file pprz_algebra_int.h.
Referenced by ctrl_eff_scheduling_periodic(), guidance_h_run(), and transition_run().
| #define INT32_POS_FRAC 8 |
Definition at line 68 of file pprz_algebra_int.h.
Referenced by computeOptiTrack(), ecef_of_enu_pos_i(), enu_of_ecef_pos_i(), gh_set_ref(), gh_update_ref_from_pos_sp(), guidance_h_traj_run(), guidance_h_update_reference(), guidance_hybrid_airspeed_to_attitude(), gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), hott_update_eam_msg(), nav_approaching_from(), nav_route(), navigation_update_wp_from_speed(), rotorcraft_cam_periodic(), and run_hover_loop().
| #define INT32_POS_OF_CM 2.56 |
Definition at line 69 of file pprz_algebra_int.h.
| #define INT32_POS_OF_CM_DEN 25 |
Definition at line 71 of file pprz_algebra_int.h.
Referenced by gps_cb(), gps_sim_hitl_event(), ins_float_invariant_update_gps(), ins_int_update_gps(), and ins_module_update_gps().
| #define INT32_POS_OF_CM_NUM 64 |
Definition at line 70 of file pprz_algebra_int.h.
Referenced by gps_cb(), gps_sim_hitl_event(), ins_float_invariant_update_gps(), ins_int_update_gps(), and ins_module_update_gps().
| #define INT32_QUAT_COMP | ( | _a2c, | |
| _a2b, | |||
| _b2c | |||
| ) | WARNING("INT32_QUAT_COMP macro is deprecated, use the lower case function instead") int32_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
Definition at line 530 of file pprz_algebra_int.h.
| #define INT32_QUAT_COMP_INV | ( | _a2b, | |
| _a2c, | |||
| _b2c | |||
| ) | WARNING("INT32_QUAT_COMP_INV macro is deprecated, use the lower case function instead") int32_quat_comp_inv(&(_a2b), &(_a2c), &(_b2c)) |
Definition at line 531 of file pprz_algebra_int.h.
| #define INT32_QUAT_COMP_NORM_SHORTEST | ( | _a2c, | |
| _a2b, | |||
| _b2c | |||
| ) | WARNING("INT32_QUAT_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") int32_quat_comp_norm_shortest(&(_a2c), &(_a2b), &(_b2c)) |
Definition at line 533 of file pprz_algebra_int.h.
| #define INT32_QUAT_DERIVATIVE | ( | _qd, | |
| _r, | |||
| _q | |||
| ) | WARNING("INT32_QUAT_DERIVATIVE macro is deprecated, use the lower case function instead") int32_quat_derivative(&(_qd), &(_r), &(_q)) |
Definition at line 535 of file pprz_algebra_int.h.
| #define INT32_QUAT_FRAC 15 |
Definition at line 95 of file pprz_algebra_int.h.
Referenced by attitude_ref_quat_int_update(), int32_eulers_of_quat(), int32_quat_comp(), int32_quat_comp_inv(), int32_quat_inv_comp(), int32_quat_of_axis_angle(), int32_quat_of_eulers(), int32_quat_of_rmat(), int32_quat_vmult(), and int32_rmat_of_quat().
| #define INT32_QUAT_INTEGRATE_FI | ( | _q, | |
| _hr, | |||
| _omega, | |||
| _f | |||
| ) | WARNING("INT32_QUAT_INTEGRATE_FI macro is deprecated, use the lower case function instead") int32_quat_integrate_fi(&(_q), &(_hr), &(_omega), _f) |
Definition at line 536 of file pprz_algebra_int.h.
| #define INT32_QUAT_INV_COMP | ( | _b2c, | |
| _a2b, | |||
| _a2c | |||
| ) | WARNING("INT32_QUAT_INV_COMP macro is deprecated, use the lower case function instead") int32_quat_inv_comp(&(_b2c), &(_a2b), &(_a2c)) |
Definition at line 532 of file pprz_algebra_int.h.
| #define INT32_QUAT_INV_COMP_NORM_SHORTEST | ( | _b2c, | |
| _a2b, | |||
| _a2c | |||
| ) | WARNING("INT32_QUAT_INV_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") int32_quat_inv_comp_norm_shortest(&(_b2c), &(_a2b), &(_a2c)) |
Definition at line 534 of file pprz_algebra_int.h.
| #define INT32_QUAT_NORM | ( | n, | |
| q | |||
| ) | WARNING("INT32_QUAT_NORM macro is deprecated, use the lower case function instead") { n = int32_quat_norm(&(q)); } |
Definition at line 527 of file pprz_algebra_int.h.
| #define INT32_QUAT_NORMALIZE | ( | q | ) | WARNING("INT32_QUAT_NORMALIZE macro is deprecated, use the lower case function instead") int32_quat_normalize(&(q)) |
Definition at line 529 of file pprz_algebra_int.h.
| #define INT32_QUAT_OF_AXIS_ANGLE | ( | _q, | |
| _uv, | |||
| _an | |||
| ) | WARNING("INT32_QUAT_OF_AXIS_ANGLE macro is deprecated, use the lower case function instead") int32_quat_of_axis_angle(&(_q), &(_uv), _an) |
Definition at line 539 of file pprz_algebra_int.h.
| #define INT32_QUAT_OF_EULERS | ( | _q, | |
| _e | |||
| ) | WARNING("INT32_QUAT_OF_EULERS macro is deprecated, use the lower case function instead") int32_quat_of_eulers(&(_q), &(_e)) |
Definition at line 538 of file pprz_algebra_int.h.
| #define INT32_QUAT_OF_RMAT | ( | _q, | |
| _r | |||
| ) | WARNING("INT32_QUAT_OF_RMAT macro is deprecated, use the lower case function instead") int32_quat_of_rmat(&(_q), &(_r)) |
Definition at line 540 of file pprz_algebra_int.h.
| #define INT32_QUAT_VMULT | ( | v_out, | |
| q, | |||
| v_in | |||
| ) | WARNING("INT32_QUAT_VMULT macro is deprecated, use the lower case function instead") int32_quat_vmult(&(v_out), &(q), &(v_in)) |
Definition at line 537 of file pprz_algebra_int.h.
| #define INT32_QUAT_WRAP_SHORTEST | ( | q | ) | WARNING("INT32_QUAT_WRAP_SHORTEST macro is deprecated, use the lower case function instead") int32_quat_wrap_shortest(&(q)) |
Definition at line 528 of file pprz_algebra_int.h.
| #define INT32_QUAT_ZERO | ( | _q | ) | WARNING("INT32_QUAT_ZERO macro is deprecated, use the lower case function instead") int32_quat_identity(&(_q)) |
Definition at line 526 of file pprz_algebra_int.h.
Definition at line 123 of file pprz_algebra_int.h.
| #define INT32_RATE_FRAC 12 |
Definition at line 117 of file pprz_algebra_int.h.
Referenced by attitude_ref_quat_int_update(), int32_quat_derivative(), int32_quat_integrate_fi(), and stabilization_attitude_run().
| #define INT32_RATES_OF_EULERS_DOT | ( | _r, | |
| _e, | |||
| _ed | |||
| ) | WARNING("INT32_RATES_OF_EULERS_DOT macro is deprecated, use the lower case function instead") int32_rates_of_eulers_dot_321(&(_r), &(_e), &(_ed)) |
Definition at line 597 of file pprz_algebra_int.h.
| #define INT32_RATES_OF_EULERS_DOT_321 | ( | _r, | |
| _e, | |||
| _ed | |||
| ) | WARNING("INT32_RATES_OF_EULERS_DOT_321 macro is deprecated, use the lower case function instead") int32_rates_of_eulers_dot_321(&(_r), &(_e), &(_ed)) |
Definition at line 596 of file pprz_algebra_int.h.
| #define INT32_RMAT_COMP | ( | _m_a2c, | |
| _m_a2b, | |||
| _m_b2c | |||
| ) | WARNING("INT32_RMAT_COMP macro is deprecated, use the lower case function instead") int32_rmat_comp(&(_m_a2c), &(_m_a2b), &(_m_b2c)) |
Definition at line 411 of file pprz_algebra_int.h.
| #define INT32_RMAT_COMP_INV | ( | _m_a2b, | |
| _m_a2c, | |||
| _m_b2c | |||
| ) | WARNING("INT32_RMAT_COMP_INV macro is deprecated, use the lower case function instead") int32_rmat_comp_inv(&(_m_a2b), &(_m_a2c), &(_m_b2c)) |
Definition at line 412 of file pprz_algebra_int.h.
| #define int32_rmat_of_eulers int32_rmat_of_eulers_321 |
Rotation matrix from Euler angles.
Definition at line 408 of file pprz_algebra_int.h.
Referenced by mag_hmc58xx_module_init(), orientationCalcRMat_i(), and set_body_state_from_euler().
| #define INT32_RMAT_OF_EULERS | ( | _rm, | |
| _e | |||
| ) | WARNING("INT32_RMAT_OF_EULERS macro is deprecated, use the lower case function instead") int32_rmat_of_eulers_321(&(_rm), &(_e)) |
Definition at line 419 of file pprz_algebra_int.h.
| #define INT32_RMAT_OF_EULERS_312 | ( | _rm, | |
| _e | |||
| ) | WARNING("INT32_RMAT_OF_EULERS_312 macro is deprecated, use the lower case function instead") int32_rmat_of_eulers_312(&(_rm), &(_e)) |
Definition at line 421 of file pprz_algebra_int.h.
| #define INT32_RMAT_OF_EULERS_321 | ( | _rm, | |
| _e | |||
| ) | WARNING("INT32_RMAT_OF_EULERS_321 macro is deprecated, use the lower case function instead") int32_rmat_of_eulers_321(&(_rm), &(_e)) |
Definition at line 420 of file pprz_algebra_int.h.
| #define INT32_RMAT_OF_QUAT | ( | _rm, | |
| _q | |||
| ) | WARNING("INT32_RMAT_OF_QUAT macro is deprecated, use the lower case function instead") int32_rmat_of_quat(&(_rm), &(_q)) |
Definition at line 418 of file pprz_algebra_int.h.
| #define INT32_RMAT_RATEMULT | ( | _rb, | |
| _m_a2b, | |||
| _ra | |||
| ) | WARNING("INT32_RMAT_RATEMULT macro is deprecated, use the lower case function instead") int32_rmat_ratemult(&(_rb), &(_m_a2b), &(_ra)) |
Definition at line 415 of file pprz_algebra_int.h.
| #define INT32_RMAT_TRANSP_RATEMULT | ( | _rb, | |
| _m_b2a, | |||
| _ra | |||
| ) | WARNING("INT32_RMAT_TRANSP_RATEMULT macro is deprecated, use the lower case function instead") int32_rmat_ratemult(&(_rb), &(_m_b2a), &(_ra)) |
Definition at line 416 of file pprz_algebra_int.h.
| #define INT32_RMAT_TRANSP_VMULT | ( | _vb, | |
| _m_b2a, | |||
| _va | |||
| ) | WARNING("INT32_RMAT_TRANSP_VMULT macro is deprecated, use the lower case function instead") int32_rmat_transp_vmult(&(_vb), &(_m_b2a), &(_va)) |
Definition at line 414 of file pprz_algebra_int.h.
| #define INT32_RMAT_VMULT | ( | _vb, | |
| _m_a2b, | |||
| _va | |||
| ) | WARNING("INT32_RMAT_VMULT macro is deprecated, use the lower case function instead") int32_rmat_vmult(&(_vb), &(_m_a2b), &(_va)) |
Definition at line 413 of file pprz_algebra_int.h.
| #define INT32_SPEED_FRAC 19 |
Definition at line 73 of file pprz_algebra_int.h.
Referenced by computeOptiTrack(), gh_set_ref(), gh_update_ref_from_speed_sp(), guidance_h_traj_run(), guidance_h_update_reference(), gv_adapt_run(), gv_set_ref(), gv_update_ref_from_zd_sp(), hott_update_eam_msg(), nav_approaching_from(), navigation_update_wp_from_speed(), run_hover_loop(), and stateCalcHorizontalSpeedNorm_i().
| #define INT32_SPEED_OF_CM_S 5242.88 |
Definition at line 74 of file pprz_algebra_int.h.
| #define INT32_SPEED_OF_CM_S_DEN 8 |
Definition at line 76 of file pprz_algebra_int.h.
Referenced by gps_cb(), gps_sim_hitl_event(), ins_int_update_gps(), and ins_module_update_gps().
| #define INT32_SPEED_OF_CM_S_NUM 41943 |
Definition at line 75 of file pprz_algebra_int.h.
Referenced by gps_cb(), gps_sim_hitl_event(), ins_int_update_gps(), and ins_module_update_gps().
| #define INT32_SQRT | ( | _out, | |
| _in | |||
| ) | WARNING("INT32_SQRT macro is deprecated, use the lower case function instead") { _out = int32_sqrt(_in); } |
Definition at line 230 of file pprz_algebra_int.h.
| #define INT32_TRIG_FRAC 14 |
Definition at line 154 of file pprz_algebra_int.h.
Referenced by ahrs_int_get_euler_from_accel_mag(), computeOptiTrack(), georeference_project(), get_phi_theta_measurement_fom_accel(), get_psi_measurement_from_mag(), get_vertical_thrust_coeff(), gh_compute_ref_max(), gh_compute_ref_max_accel(), gh_compute_ref_max_speed(), guidance_h_traj_run(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_position_to_airspeed(), guidance_v_init(), guidance_v_thrust_adapt(), int32_eulers_dot_321_of_rates(), int32_eulers_of_quat(), int32_quat_of_axis_angle(), int32_quat_of_eulers(), int32_quat_of_rmat(), int32_rates_of_eulers_dot_321(), int32_rmat_comp(), int32_rmat_comp_inv(), int32_rmat_of_eulers_312(), int32_rmat_of_eulers_321(), int32_rmat_of_quat(), int32_rmat_ratemult(), int32_rmat_transp_ratemult(), int32_rmat_transp_vmult(), int32_rmat_vmult(), nav_circle(), navigation_update_wp_from_speed(), read_rc_setpoint_speed_i(), run_hover_loop(), stabilization_attitude_get_heading_i(), stabilization_attitude_set_earth_cmd_i(), and stabilization_indi_set_earth_cmd_i().
| #define INT32_VECT2_LSHIFT | ( | _o, | |
| _i, | |||
| _l | |||
| ) |
Definition at line 273 of file pprz_algebra_int.h.
Referenced by gh_compute_ref_max(), gh_compute_ref_max_speed(), and guidance_h_update_reference().
| #define INT32_VECT2_NORM | ( | _v | ) | int32_sqrt(VECT2_NORM2(_v)) |
Definition at line 240 of file pprz_algebra_int.h.
Referenced by rotorcraft_cam_periodic().
| #define INT32_VECT2_NORMALIZE | ( | _v, | |
| _frac | |||
| ) | WARNING("INT32_VECT2_NORMALIZE macro is deprecated, use the lower case function instead") int32_vect2_normalize(&(_v), _frac) |
Definition at line 265 of file pprz_algebra_int.h.
| #define INT32_VECT2_RSHIFT | ( | _o, | |
| _i, | |||
| _r | |||
| ) |
Definition at line 268 of file pprz_algebra_int.h.
Referenced by gh_set_ref(), gh_update_ref_from_pos_sp(), gh_update_ref_from_speed_sp(), guidance_h_update_reference(), guidance_hybrid_determine_wind_estimate(), nav_approaching_from(), nav_circle(), nav_route(), and rotorcraft_cam_periodic().
| #define INT32_VECT2_SCALE_2 | ( | _a, | |
| _b, | |||
| _num, | |||
| _den | |||
| ) |
Definition at line 278 of file pprz_algebra_int.h.
Referenced by ins_int_update_gps().
| #define INT32_VECT3_LSHIFT | ( | _o, | |
| _i, | |||
| _l | |||
| ) |
Definition at line 304 of file pprz_algebra_int.h.
Referenced by enu_of_ecef_pos_i(), and georeference_project().
| #define INT32_VECT3_NORM | ( | _v | ) | int32_sqrt(VECT3_NORM2(_v)) |
Definition at line 296 of file pprz_algebra_int.h.
| #define INT32_VECT3_RSHIFT | ( | _o, | |
| _i, | |||
| _r | |||
| ) |
Definition at line 298 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_accel(), ecef_of_enu_pos_i(), and navigation_update_wp_from_speed().
| #define INT32_VECT3_SCALE_2 | ( | _a, | |
| _b, | |||
| _num, | |||
| _den | |||
| ) |
Definition at line 290 of file pprz_algebra_int.h.
Referenced by gps_cb(), ins_float_invariant_update_gps(), and ins_module_update_gps().
| #define INT32_VECT3_ZERO | ( | _v | ) | VECT3_ASSIGN(_v, 0, 0, 0) |
Definition at line 288 of file pprz_algebra_int.h.
Referenced by ahrs_vectornav_init(), georeference_init(), ins_gps_passthrough_init(), ins_int_init(), ins_module_wrapper_init(), and ins_vectornav_init().
| #define INT_EULERS_ZERO | ( | _e | ) | EULERS_ASSIGN(_e, 0, 0, 0) |
Definition at line 549 of file pprz_algebra_int.h.
Referenced by ahrs_ice_init(), attitude_ref_euler_int_init(), attitude_ref_quat_int_init(), guidance_hybrid_init(), int32_eulers_dot_321_of_rates(), stabilization_attitude_enter(), stabilization_attitude_init(), stabilization_attitude_run(), vi_init(), and vi_periodic().
| #define INT_MULT_RSHIFT | ( | _a, | |
| _b, | |||
| _r | |||
| ) | (((_a)*(_b))>>(_r)) |
Definition at line 225 of file pprz_algebra_int.h.
Referenced by ahrs_int_get_euler_from_accel_mag(), get_phi_theta_measurement_fom_accel(), gh_compute_ref_max(), gh_compute_ref_max_accel(), gh_compute_ref_max_speed(), guidance_hybrid_position_to_airspeed(), guidance_hybrid_vertical(), int32_eulers_dot_321_of_rates(), int32_eulers_of_quat(), int32_quat_of_eulers(), int32_rates_of_eulers_dot_321(), int32_rmat_of_eulers_312(), int32_rmat_of_eulers_321(), int32_rmat_of_quat(), stabilization_attitude_get_heading_i(), stabilization_attitude_read_rc_setpoint_eulers(), and transition_run().
| #define INT_RATES_LSHIFT | ( | _o, | |
| _i, | |||
| _r | |||
| ) |
Definition at line 583 of file pprz_algebra_int.h.
Referenced by ahrs_icq_align().
| #define INT_RATES_RSHIFT | ( | _o, | |
| _i, | |||
| _r | |||
| ) |
Definition at line 577 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_accel(), ahrs_icq_update_heading(), ahrs_icq_update_mag_2d(), and ahrs_icq_update_mag_full().
| #define INT_RATES_ZERO | ( | _e | ) | RATES_ASSIGN(_e, 0, 0, 0) |
Definition at line 575 of file pprz_algebra_int.h.
Referenced by ahrs_aligner_init(), ahrs_aligner_run(), ahrs_ice_init(), ahrs_icq_init(), ahrs_icq_propagate(), attitude_ref_euler_int_init(), attitude_ref_quat_int_init(), stabilization_attitude_run(), stabilization_none_enter(), and stabilization_none_init().
| #define INT_VECT2_ZERO | ( | _v | ) | VECT2_ASSIGN(_v, 0, 0) |
Definition at line 237 of file pprz_algebra_int.h.
Referenced by gps_sim_hitl_event(), guidance_h_init(), guidance_h_set_igain(), guidance_h_traj_run(), guidance_h_update_reference(), guidance_hybrid_init(), guidance_hybrid_position_to_airspeed(), and reset_guidance_reference_from_current_position().
| #define INT_VECT3_ZERO | ( | _v | ) | VECT3_ASSIGN(_v, 0, 0, 0) |
Definition at line 287 of file pprz_algebra_int.h.
Referenced by ahrs_aligner_init(), ahrs_aligner_run(), imu_init(), imu_krooz_periodic(), ms2100_init(), and nav_check_wp_time().
| #define MAG_BFP_OF_REAL | ( | _af | ) | BFP_OF_REAL((_af), INT32_MAG_FRAC) |
Definition at line 222 of file pprz_algebra_int.h.
Referenced by ahrs_icq_init(), geo_mag_cb(), handle_ins_msg(), and mag_calib_ukf_run().
| #define MAG_FLOAT_OF_BFP | ( | _ai | ) | FLOAT_OF_BFP((_ai), INT32_MAG_FRAC) |
Definition at line 223 of file pprz_algebra_int.h.
Referenced by mag_calib_ukf_run(), and send_geo_mag().
| #define POS_BFP_OF_REAL | ( | _af | ) | BFP_OF_REAL((_af), INT32_POS_FRAC) |
Definition at line 216 of file pprz_algebra_int.h.
Referenced by calculateForwards(), dc_send_command(), fc_read_msg(), follow_wp(), guidance_h_set_guided_pos(), guidance_hybrid_position_to_airspeed(), guidance_v_set_guided_z(), ins_update_from_vff(), mission_nav_circle(), nav_init(), nav_oval(), nav_set_altitude(), NavCircleWaypoint(), pos_est_cb(), run_avoid_navigation_onvision(), send_fp(), vel_est_cb(), waypoint_localize(), and waypoint_set_alt().
| #define POS_FLOAT_OF_BFP | ( | _ai | ) | FLOAT_OF_BFP((_ai), INT32_POS_FRAC) |
Definition at line 217 of file pprz_algebra_int.h.
Referenced by calculateForwards(), get_dist2_to_point(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_position_to_airspeed(), guidance_indi_run(), mission_nav_circle(), mission_nav_path(), mission_nav_segment(), mission_nav_wp(), moveWaypoint(), nav_approaching_from(), nav_check_wp_time(), nav_set_heading_towards_target(), NavGlide(), send_circle(), send_segment(), waypoint_set_alt_i(), and waypoint_set_xy_i().
| #define QUAT1_BFP_OF_REAL | ( | _qf | ) | BFP_OF_REAL((_qf), INT32_QUAT_FRAC) |
Definition at line 212 of file pprz_algebra_int.h.
Referenced by int32_quat_identity(), int32_quat_normalize(), and int32_quat_vmult().
| #define QUAT1_FLOAT_OF_BFP | ( | _qi | ) | FLOAT_OF_BFP((_qi), INT32_QUAT_FRAC) |
Definition at line 213 of file pprz_algebra_int.h.
Referenced by attitude_run_fb(), and stabilization_indi_calc_cmd().
| #define RATE_BFP_OF_REAL | ( | _af | ) | BFP_OF_REAL((_af), INT32_RATE_FRAC) |
Definition at line 208 of file pprz_algebra_int.h.
Referenced by handle_ins_msg().
| #define RATE_FLOAT_OF_BFP | ( | _ai | ) | FLOAT_OF_BFP((_ai), INT32_RATE_FRAC) |
Definition at line 209 of file pprz_algebra_int.h.
Referenced by ArduIMU_event(), attitude_run_fb(), attitude_run_ff(), and nps_ivy_display().
| #define SPEED_BFP_OF_REAL | ( | _af | ) | BFP_OF_REAL((_af), INT32_SPEED_FRAC) |
Definition at line 218 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_gps(), autopilot_static_set_mode(), guidance_h_set_guided_vel(), guidance_v_read_rc(), guidance_v_set_guided_vz(), ins_update_from_vff(), read_rc_setpoint_speed_i(), stateCalcAirspeed_i(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_i(), stateCalcHorizontalWindspeed_i(), stateCalcVerticalWindspeed_i(), and vel_est_cb().
| #define SPEED_FLOAT_OF_BFP | ( | _ai | ) | FLOAT_OF_BFP((_ai), INT32_SPEED_FRAC) |
Definition at line 219 of file pprz_algebra_int.h.
Referenced by stateCalcAirspeed_f(), stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalWindspeed_f(), and stateCalcVerticalWindspeed_f().
| #define TRIG_BFP_OF_REAL | ( | _tf | ) | BFP_OF_REAL((_tf), INT32_TRIG_FRAC) |
Definition at line 214 of file pprz_algebra_int.h.
Referenced by ahrs_icq_update_heading(), int32_eulers_of_quat(), int32_quat_of_rmat(), int32_rmat_identity(), and int32_rmat_of_quat().
| #define TRIG_FLOAT_OF_BFP | ( | _ti | ) | FLOAT_OF_BFP((_ti),INT32_TRIG_FRAC) |
Definition at line 215 of file pprz_algebra_int.h.
Referenced by int32_eulers_of_rmat().
| void int32_eulers_dot_321_of_rates | ( | struct Int32Eulers * | ed, |
| struct Int32Eulers * | e, | ||
| struct Int32Rates * | r | ||
| ) |
Definition at line 588 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, INT_EULERS_ZERO, INT_MULT_RSHIFT, Int32Rates::p, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, Int32Rates::q, Int32Rates::r, and Int32Eulers::theta.
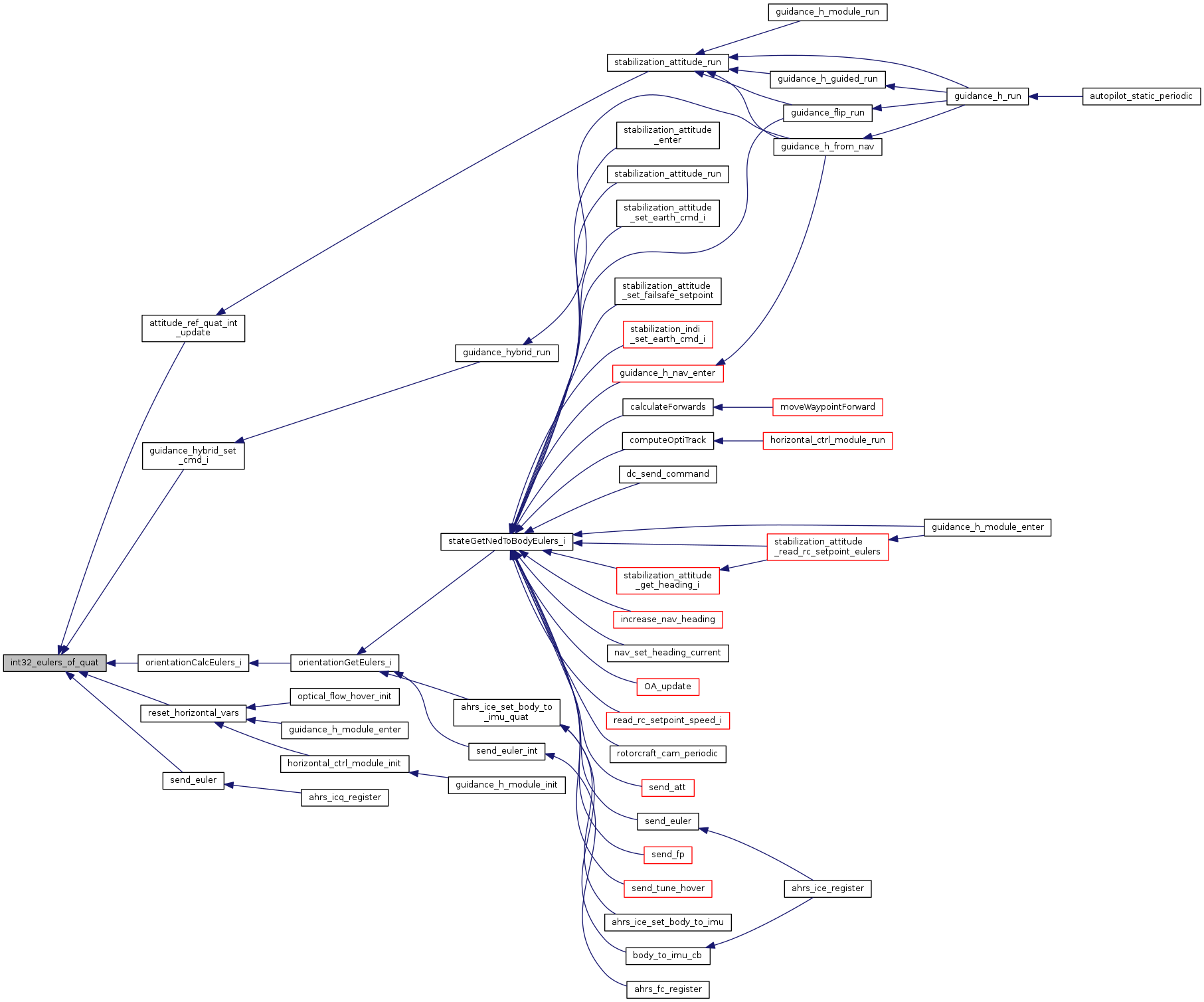
| void int32_eulers_of_quat | ( | struct Int32Eulers * | e, |
| struct Int32Quat * | q | ||
| ) |
Definition at line 519 of file pprz_algebra_int.c.
References ANGLE_BFP_OF_REAL, INT32_QUAT_FRAC, INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32Eulers::phi, Int32Eulers::psi, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, Int32Eulers::theta, and TRIG_BFP_OF_REAL.
Referenced by attitude_ref_quat_int_update(), guidance_hybrid_set_cmd_i(), orientationCalcEulers_i(), reset_horizontal_vars(), and send_euler().
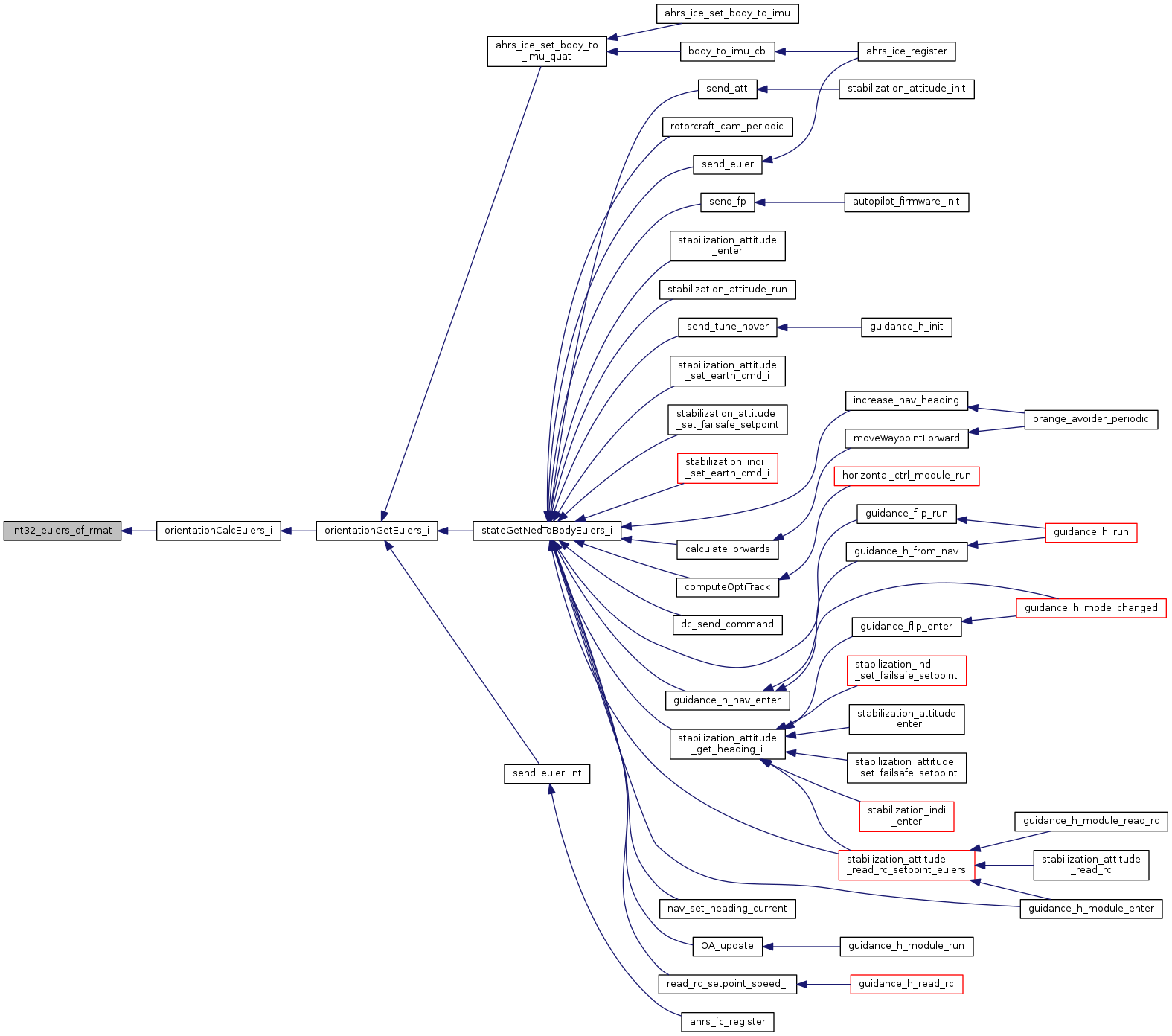
Here is the caller graph for this function:| void int32_eulers_of_rmat | ( | struct Int32Eulers * | e, |
| struct Int32RMat * | rm | ||
| ) |
Definition at line 504 of file pprz_algebra_int.c.
References ANGLE_BFP_OF_REAL, Int32RMat::m, Int32Eulers::phi, Int32Eulers::psi, Int32Eulers::theta, and TRIG_FLOAT_OF_BFP.
Referenced by orientationCalcEulers_i().
Here is the caller graph for this function:Definition at line 52 of file pprz_algebra_int.c.
Referenced by mt9f002_set_blanking().
Here is the caller graph for this function:Composition (multiplication) of two quaternions.
a2c = a2b comp b2c , aka a2c = a2b * b2c
Definition at line 269 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, and Int32Quat::qz.
Referenced by ahrs_icq_realign_heading(), guidance_hybrid_set_cmd_i(), and int32_quat_comp_norm_shortest().
Here is the caller graph for this function:Composition (multiplication) of two quaternions.
a2b = a2c comp_inv b2c , aka a2b = a2c * inv(b2c)
Definition at line 277 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, and Int32Quat::qz.
Referenced by ahrs_icq_realign_heading(), ahrs_icq_update_heading(), int32_quat_comp_inv_norm_shortest(), set_body_state_from_quat(), and stabilization_attitude_run().
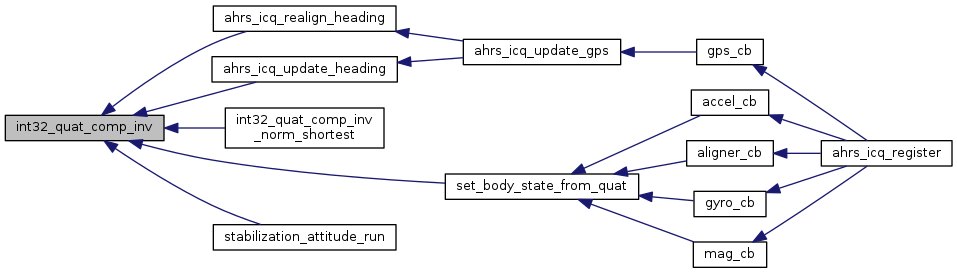
Here is the caller graph for this function:| void int32_quat_comp_inv_norm_shortest | ( | struct Int32Quat * | a2b, |
| struct Int32Quat * | a2c, | ||
| struct Int32Quat * | b2c | ||
| ) |
Composition (multiplication) of two quaternions with normalization.
a2b = a2c comp_inv b2c , aka a2b = a2c * inv(b2c)
Definition at line 300 of file pprz_algebra_int.c.
References int32_quat_comp_inv(), int32_quat_normalize(), and int32_quat_wrap_shortest().
Here is the call graph for this function:| void int32_quat_comp_norm_shortest | ( | struct Int32Quat * | a2c, |
| struct Int32Quat * | a2b, | ||
| struct Int32Quat * | b2c | ||
| ) |
Composition (multiplication) of two quaternions with normalization.
a2c = a2b comp b2c , aka a2c = a2b * b2c
Definition at line 293 of file pprz_algebra_int.c.
References int32_quat_comp(), int32_quat_normalize(), and int32_quat_wrap_shortest().
Referenced by ahrs_icq_realign_heading().
Here is the call graph for this function: Here is the caller graph for this function:| void int32_quat_derivative | ( | struct Int32Quat * | qd, |
| const struct Int32Rates * | r, | ||
| struct Int32Quat * | q | ||
| ) |
Quaternion derivative from rotational velocity.
qd = -0.5*omega(r) * q or equally: qd = 0.5 * q * omega(r)
qd = -0.5*omega(r) * q or equally: qd = 0.5 * q * omega(r) Multiplication with 0.5 is done by shifting one more bit to the right.
Definition at line 320 of file pprz_algebra_int.c.
References INT32_RATE_FRAC, Int32Rates::p, Int32Rates::q, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, and Int32Rates::r.
Referenced by attitude_ref_quat_int_update().
Here is the caller graph for this function:
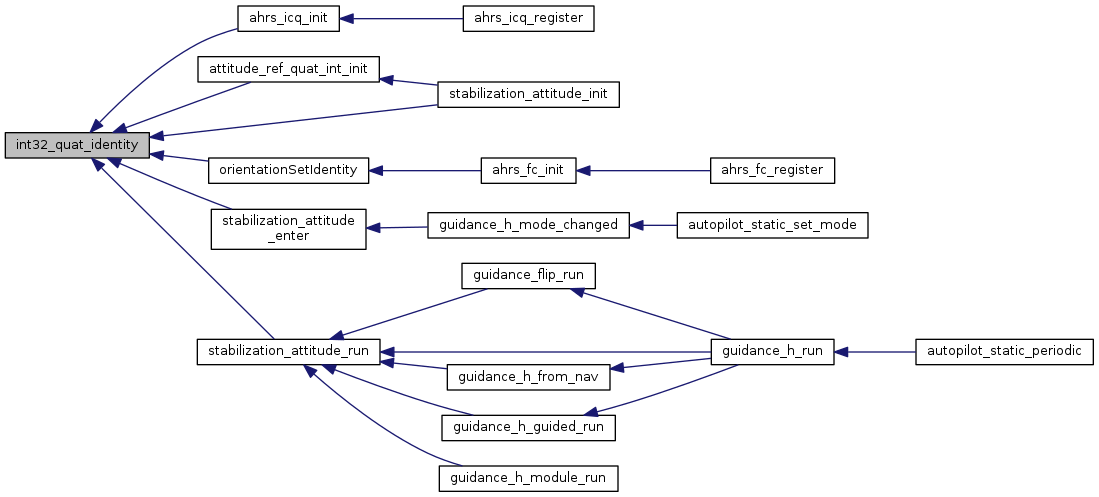
|
inlinestatic |
initialises a quaternion to identity
Definition at line 431 of file pprz_algebra_int.h.
References Int32Quat::qi, QUAT1_BFP_OF_REAL, Int32Quat::qx, Int32Quat::qy, and Int32Quat::qz.
Referenced by ahrs_icq_init(), attitude_ref_quat_int_init(), orientationSetIdentity(), stabilization_attitude_enter(), stabilization_attitude_init(), and stabilization_attitude_run().
Here is the caller graph for this function:| void int32_quat_integrate_fi | ( | struct Int32Quat * | q, |
| struct Int64Quat * | hr, | ||
| struct Int32Rates * | omega, | ||
| int | freq | ||
| ) |
in place quaternion first order integration with constant rotational velocity.
Definition at line 329 of file pprz_algebra_int.c.
References INT32_RATE_FRAC, Int32Rates::p, Int32Rates::q, Int32Quat::qi, Int64Quat::qi, Int32Quat::qx, Int64Quat::qx, Int32Quat::qy, Int64Quat::qy, Int32Quat::qz, Int64Quat::qz, and Int32Rates::r.
Referenced by ahrs_icq_propagate().
Here is the caller graph for this function:Composition (multiplication) of two quaternions.
b2c = a2b inv_comp a2c , aka b2c = inv(_a2b) * a2c
Definition at line 285 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, and Int32Quat::qz.
Referenced by attitude_ref_quat_int_update(), int32_quat_inv_comp_norm_shortest(), stabilization_attitude_run(), and stabilization_indi_run().
Here is the caller graph for this function:| void int32_quat_inv_comp_norm_shortest | ( | struct Int32Quat * | b2c, |
| struct Int32Quat * | a2b, | ||
| struct Int32Quat * | a2c | ||
| ) |
Composition (multiplication) of two quaternions with normalization.
b2c = a2b inv_comp a2c , aka b2c = inv(_a2b) * a2c
Definition at line 307 of file pprz_algebra_int.c.
References int32_quat_inv_comp(), int32_quat_normalize(), and int32_quat_wrap_shortest().
Referenced by ahrs_icq_realign_heading().
Here is the call graph for this function: Here is the caller graph for this function:Norm of a quaternion.
Definition at line 441 of file pprz_algebra_int.h.
References int32_sqrt(), Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, and Int32Quat::qz.
Referenced by int32_quat_normalize().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
normalize a quaternion inplace
Definition at line 455 of file pprz_algebra_int.h.
References int32_quat_norm(), Int32Quat::qi, QUAT1_BFP_OF_REAL, Int32Quat::qx, Int32Quat::qy, and Int32Quat::qz.
Referenced by ahrs_icq_propagate(), ahrs_icq_realign_heading(), attitude_ref_quat_int_update(), int32_quat_comp_inv_norm_shortest(), int32_quat_comp_norm_shortest(), int32_quat_inv_comp_norm_shortest(), stabilization_attitude_run(), and stabilization_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void int32_quat_of_axis_angle | ( | struct Int32Quat * | q, |
| struct Int32Vect3 * | uv, | ||
| int32_t | angle | ||
| ) |
Quaternion from unit vector and angle.
Output quaternion is not normalized. The output resolution depends on the resolution of the resolution of the unit vector. If the unit vector has no fractional part (ex: [0, 0, 1]), the quaternion is unitary.
Definition at line 409 of file pprz_algebra_int.c.
References can2, INT32_QUAT_FRAC, INT32_TRIG_FRAC, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by guidance_hybrid_set_cmd_i().
Here is the caller graph for this function:| void int32_quat_of_eulers | ( | struct Int32Quat * | q, |
| struct Int32Eulers * | e | ||
| ) |
Quaternion from Euler angles.
Definition at line 375 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, and Int32Eulers::theta.
Referenced by attitude_ref_quat_int_enter(), orientationCalcQuat_i(), stabilization_attitude_set_rpy_setpoint_i(), and stabilization_indi_set_rpy_setpoint_i().
Here is the caller graph for this function:Quaternion from rotation matrix.
Definition at line 421 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, int32_sqrt(), INT32_TRIG_FRAC, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, RMAT_ELMT, RMAT_TRACE, and TRIG_BFP_OF_REAL.
Referenced by orientationCalcQuat_i().
Here is the call graph for this function: Here is the caller graph for this function:| void int32_quat_vmult | ( | struct Int32Vect3 * | v_out, |
| struct Int32Quat * | q, | ||
| struct Int32Vect3 * | v_in | ||
| ) |
rotate 3D vector by quaternion.
vb = q_a2b * va * q_a2b^-1 Doesn't support inplace rotation, meaning v_out mustn't be a pointer to same struct as v_in.
Definition at line 353 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, Int32Quat::qi, QUAT1_BFP_OF_REAL, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by ins_int_update_gps().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 447 of file pprz_algebra_int.h.
References Int32Quat::qi, and QUAT_EXPLEMENTARY.
Referenced by attitude_ref_quat_int_enter(), attitude_ref_quat_int_update(), int32_quat_comp_inv_norm_shortest(), int32_quat_comp_norm_shortest(), int32_quat_inv_comp_norm_shortest(), stabilization_attitude_run(), and stabilization_indi_run().
Here is the caller graph for this function:| void int32_rates_of_eulers_dot_321 | ( | struct Int32Rates * | r, |
| struct Int32Eulers * | e, | ||
| struct Int32Eulers * | ed | ||
| ) |
Definition at line 569 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32Rates::p, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, Int32Rates::q, Int32Rates::r, and Int32Eulers::theta.
| void int32_rmat_comp | ( | struct Int32RMat * | m_a2c, |
| struct Int32RMat * | m_a2b, | ||
| struct Int32RMat * | m_b2c | ||
| ) |
Composition (multiplication) of two rotation matrices.
m_a2c = m_a2b comp m_b2c , aka m_a2c = m_b2c * m_a2b
_m_a2c = _m_a2b comp _m_b2c , aka _m_a2c = _m_b2c * _m_a2b
Definition at line 75 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, and Int32RMat::m.
| void int32_rmat_comp_inv | ( | struct Int32RMat * | m_a2b, |
| struct Int32RMat * | m_a2c, | ||
| struct Int32RMat * | m_b2c | ||
| ) |
Composition (multiplication) of two rotation matrices.
m_a2b = m_a2c comp_inv m_b2c , aka m_a2b = inv(_m_b2c) * m_a2c
_m_a2b = _m_a2c comp_inv _m_b2c , aka _m_a2b = inv(_m_b2c) * _m_a2c
Definition at line 91 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, and Int32RMat::m.
Referenced by set_body_state_from_euler().
Here is the caller graph for this function:
|
inlinestatic |
initialises a rotation matrix to identity
Definition at line 346 of file pprz_algebra_int.h.
References INT32_MAT33_DIAG, and TRIG_BFP_OF_REAL.
| void int32_rmat_of_eulers_312 | ( | struct Int32RMat * | rm, |
| struct Int32Eulers * | e | ||
| ) |
Rotation matrix from 312 Euler angles.
Definition at line 220 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, RMAT_ELMT, and Int32Eulers::theta.
| void int32_rmat_of_eulers_321 | ( | struct Int32RMat * | rm, |
| struct Int32Eulers * | e | ||
| ) |
Rotation matrix from 321 Euler angles (int).
The Euler angles are interpreted as zy'x'' (intrinsic) rotation. First rotate around z with psi, then around the new y' with theta, then around new x'' with phi. This is the same as a xyz (extrinsic) rotation, rotating around the fixed x, then y then z axis.
| [out] | rm | pointer to rotation matrix |
| [in] | e | pointer to Euler angles |
Definition at line 177 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, RMAT_ELMT, and Int32Eulers::theta.
Convert unit quaternion to rotation matrix.
Definition at line 148 of file pprz_algebra_int.c.
References INT32_QUAT_FRAC, INT32_TRIG_FRAC, INT_MULT_RSHIFT, Int32RMat::m, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, and TRIG_BFP_OF_REAL.
Referenced by ahrs_icq_update_accel(), ahrs_icq_update_heading(), ahrs_icq_update_mag_2d(), ahrs_icq_update_mag_full(), and orientationCalcRMat_i().
Here is the caller graph for this function:| void int32_rmat_ratemult | ( | struct Int32Rates * | rb, |
| struct Int32RMat * | m_a2b, | ||
| struct Int32Rates * | ra | ||
| ) |
rotate anglular rates by rotation matrix.
rb = m_a2b * ra
Definition at line 127 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, Int32RMat::m, Int32Rates::p, Int32Rates::q, and Int32Rates::r.
| void int32_rmat_transp_ratemult | ( | struct Int32Rates * | rb, |
| struct Int32RMat * | m_b2a, | ||
| struct Int32Rates * | ra | ||
| ) |
rotate anglular rates by transposed rotation matrix.
rb = m_b2a^T * ra
Definition at line 137 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, Int32RMat::m, Int32Rates::p, Int32Rates::q, and Int32Rates::r.
Referenced by ahrs_icq_update_accel(), set_body_state_from_euler(), and set_body_state_from_quat().
Here is the caller graph for this function:| void int32_rmat_transp_vmult | ( | struct Int32Vect3 * | vb, |
| struct Int32RMat * | m_b2a, | ||
| struct Int32Vect3 * | va | ||
| ) |
rotate 3D vector by transposed rotation matrix.
vb = m_b2a^T * va
Definition at line 117 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, Int32RMat::m, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by accel_cb(), ahrs_icq_update_mag_2d(), georeference_project(), hff_propagate(), ins_int_propagate(), and ins_module_propagate().
Here is the caller graph for this function:| void int32_rmat_vmult | ( | struct Int32Vect3 * | vb, |
| struct Int32RMat * | m_a2b, | ||
| struct Int32Vect3 * | va | ||
| ) |
rotate 3D vector by rotation matrix.
vb = m_a2b * va
Definition at line 107 of file pprz_algebra_int.c.
References INT32_TRIG_FRAC, Int32RMat::m, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by ahrs_icq_update_accel(), ahrs_icq_update_heading(), ahrs_icq_update_mag_2d(), ahrs_icq_update_mag_full(), imu_bebop_event(), mag_hmc58xx_module_event(), mag_pitot_parse_msg(), and stabilization_attitude_run().
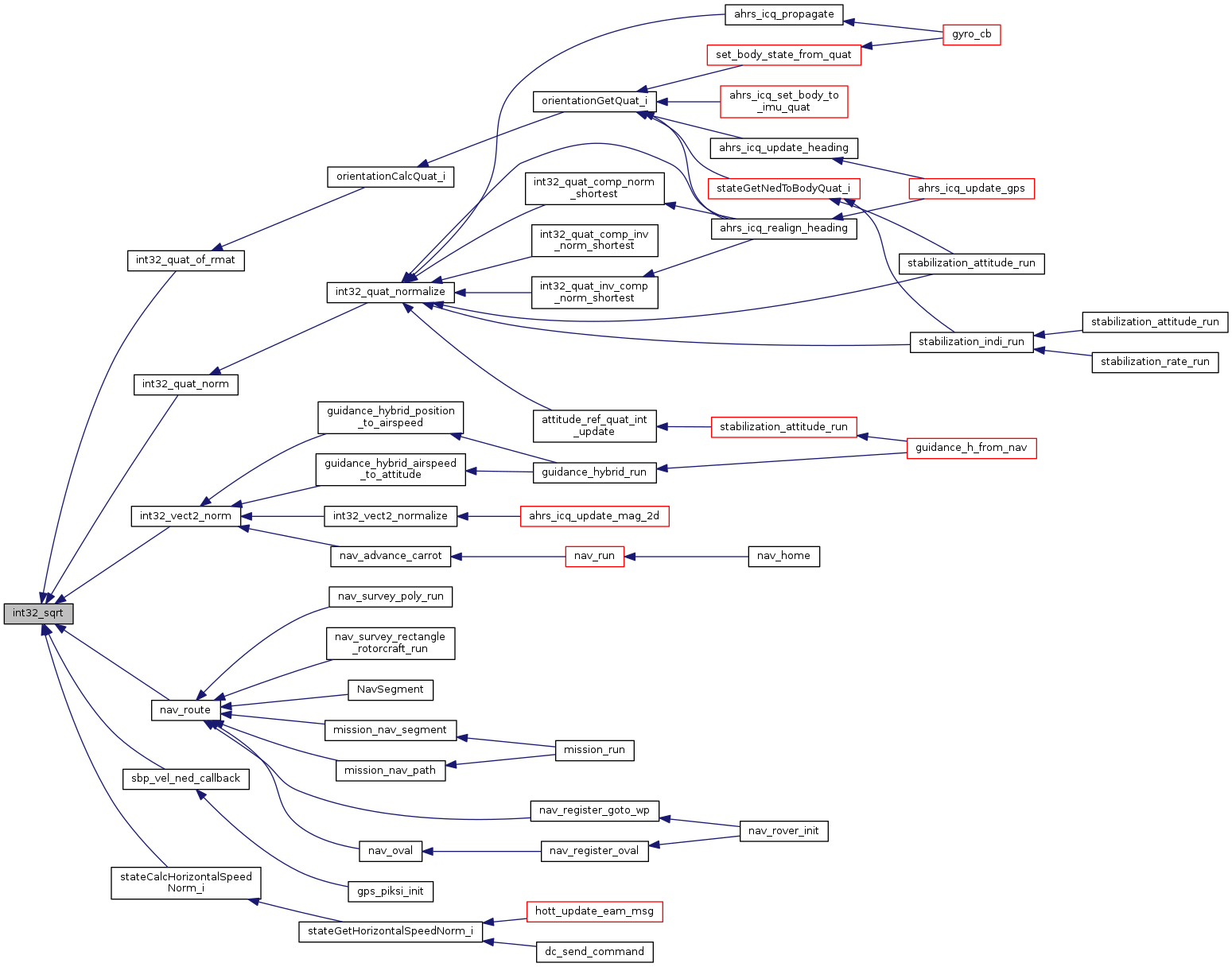
Here is the caller graph for this function:Definition at line 30 of file pprz_algebra_int.c.
References INT32_SQRT_MAX_ITER.
Referenced by int32_quat_norm(), int32_quat_of_rmat(), int32_vect2_norm(), nav_route(), sbp_vel_ned_callback(), and stateCalcHorizontalSpeedNorm_i().
Here is the caller graph for this function:
|
inlinestatic |
return norm of 2D vector
Definition at line 249 of file pprz_algebra_int.h.
References int32_sqrt(), and int32_vect2_norm2().
Referenced by guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_position_to_airspeed(), int32_vect2_normalize(), and nav_advance_carrot().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
return squared norm of 2D vector
Definition at line 243 of file pprz_algebra_int.h.
References Int32Vect2::x, and Int32Vect2::y.
Referenced by int32_vect2_norm().
Here is the caller graph for this function:
|
inlinestatic |
normalize 2D vector inplace
Definition at line 255 of file pprz_algebra_int.h.
References BFP_OF_REAL, int32_vect2_norm(), Int32Vect2::x, and Int32Vect2::y.
Referenced by ahrs_icq_update_mag_2d().
Here is the call graph for this function: Here is the caller graph for this function:a += b
Definition at line 652 of file pprz_algebra_int.h.
a = b
Definition at line 624 of file pprz_algebra_int.h.
Referenced by stabilization_attitude_run().
Here is the caller graph for this function:
|
inlinestatic |
o = a - b
Definition at line 638 of file pprz_algebra_int.h.
Referenced by stabilization_attitude_run().
Here is the caller graph for this function:
|
inlinestatic |
Find value s in array a.
Returns 1 if found, 0 if not found. If the value is found loc = index of found value in array, else loc = -1
Definition at line 675 of file pprz_algebra_int.h.
Referenced by range_msg_callback().
Here is the caller graph for this function:
|
inlinestatic |
o = a * b (element wise)
Definition at line 645 of file pprz_algebra_int.h.
a = v * ones(n,1)
Definition at line 616 of file pprz_algebra_int.h.
Referenced by relative_localization_filter_init().
Here is the caller graph for this function:
|
inlinestatic |
o = a * s
Definition at line 666 of file pprz_algebra_int.h.
a -= b
Definition at line 659 of file pprz_algebra_int.h.
|
inlinestatic |
o = a + b
Definition at line 631 of file pprz_algebra_int.h.
Referenced by stabilization_attitude_run().
Here is the caller graph for this function:
|
inlinestatic |
a = 0
Definition at line 609 of file pprz_algebra_int.h.
 1.8.8
1.8.8