|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft Inter-MCU on the autopilot. More...
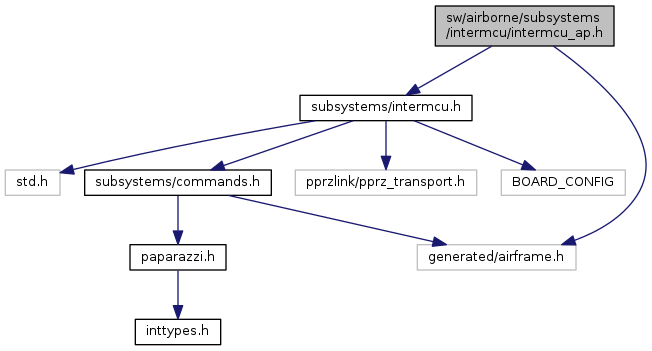
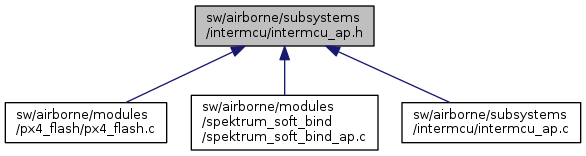
 Include dependency graph for intermcu_ap.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for intermcu_ap.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | fbw_status_t |
Macros | |
| #define | RADIO_THROTTLE 0 |
| #define | RADIO_ROLL 1 |
| #define | RADIO_PITCH 2 |
| #define | RADIO_YAW 3 |
| #define | RADIO_MODE 4 |
| #define | RADIO_KILL_SWITCH 5 |
| #define | RADIO_AUX1 5 |
| #define | RADIO_AUX2 6 |
| #define | RADIO_AUX3 7 |
| #define | RADIO_CONTROL_NB_CHANNEL 8 |
Functions | |
| void | intermcu_set_actuators (pprz_t *command_values, uint8_t ap_mode) |
| void | RadioControlEvent (void(*frame_handler)(void)) |
| void | intermcu_send_spektrum_bind (void) |
| void | intermcu_set_enabled (bool value) |
Rotorcraft Inter-MCU on the autopilot.
Definition in file intermcu_ap.h.
| struct fbw_status_t |
| #define RADIO_AUX1 5 |
Definition at line 45 of file intermcu_ap.h.
Referenced by intermcu_on_rc_frame(), and periodic_auto1_commands().
| #define RADIO_AUX2 6 |
Definition at line 46 of file intermcu_ap.h.
Referenced by intermcu_on_rc_frame(), and periodic_auto1_commands().
| #define RADIO_AUX3 7 |
Definition at line 47 of file intermcu_ap.h.
Referenced by intermcu_on_rc_frame(), and periodic_auto1_commands().
| #define RADIO_CONTROL_NB_CHANNEL 8 |
Definition at line 48 of file intermcu_ap.h.
Referenced by intermcu_on_rc_frame(), link_mcu_on_can_msg(), parse_mavpilot_msg(), ppm_arch_init(), radio_control_impl_init(), radio_control_init(), send_rc(), and spektrum_event().
| #define RADIO_KILL_SWITCH 5 |
Definition at line 44 of file intermcu_ap.h.
Referenced by fbw_on_rc_frame(), intermcu_on_rc_frame(), and send_rotorcraft_rc().
| #define RADIO_MODE 4 |
Definition at line 43 of file intermcu_ap.h.
Referenced by ap_mode_of_3way_switch(), handle_rc_frame(), intermcu_on_rc_frame(), parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), pprz_mode_update(), rc_datalink_normalize(), and send_rotorcraft_rc().
| #define RADIO_PITCH 2 |
Definition at line 41 of file intermcu_ap.h.
Referenced by autopilot_static_on_rc_frame(), get_rc_pitch(), get_rc_pitch_f(), guidance_h_module_read_rc(), guidance_indi_run(), intermcu_on_rc_frame(), parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), rc_datalink_normalize(), read_rc_setpoint_speed_i(), send_rotorcraft_rc(), send_tune_hover(), stabilization_indi_calc_cmd(), stabilization_none_read_rc(), stabilization_rate_read_rc(), stabilization_rate_read_rc_switched_sticks(), and vPoint().
| #define RADIO_ROLL 1 |
Definition at line 40 of file intermcu_ap.h.
Referenced by autopilot_static_on_rc_frame(), get_rc_roll(), get_rc_roll_f(), guidance_h_module_read_rc(), guidance_indi_run(), intermcu_on_rc_frame(), parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), rc_datalink_normalize(), read_rc_setpoint_speed_i(), send_rotorcraft_rc(), send_tune_hover(), stabilization_indi_calc_cmd(), stabilization_none_read_rc(), stabilization_rate_read_rc(), stabilization_rate_read_rc_switched_sticks(), and vPoint().
| #define RADIO_THROTTLE 0 |
Definition at line 39 of file intermcu_ap.h.
Referenced by autopilot_static_on_rc_frame(), guidance_h_module_read_rc(), guidance_indi_run(), guidance_v_read_rc(), intermcu_on_rc_frame(), parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), rc_datalink_normalize(), send_rotorcraft_rc(), spektrum_parse_channel(), and superbitrf_rc_normalize().
| #define RADIO_YAW 3 |
Definition at line 42 of file intermcu_ap.h.
Referenced by autopilot_static_on_rc_frame(), copy_from_to_fbw(), get_rc_yaw(), get_rc_yaw_f(), guidance_h_module_read_rc(), intermcu_on_rc_frame(), parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), rc_datalink_normalize(), send_rotorcraft_rc(), send_tune_hover(), stabilization_indi_calc_cmd(), stabilization_none_read_rc(), stabilization_rate_read_rc(), and stabilization_rate_read_rc_switched_sticks().
| void intermcu_send_spektrum_bind | ( | void | ) |
Definition at line 129 of file intermcu_ap.c.
References intermcu_t::device, intermcu_t::enabled, INTERMCU_AP, and intermcu_t::transport.
Referenced by spektrum_soft_bind_click().
Here is the caller graph for this function:Definition at line 111 of file intermcu_ap.c.
References autopilot_get_motors_on(), intermcu_t::cmd_status, intermcu_t::device, intermcu_t::enabled, INTERMCU_AP, INTERMCU_CMD_MOTORS_ON, INTERMCU_SET_CMD_STATUS, and intermcu_t::transport.
Referenced by main_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| void intermcu_set_enabled | ( | bool | value | ) |
Definition at line 105 of file intermcu_ap.c.
References intermcu_t::enabled.
Referenced by px4flash_event().
Here is the caller graph for this function:| void RadioControlEvent | ( | void(*)(void) | frame_handler | ) |
Definition at line 231 of file intermcu_ap.c.
References intermcu_t::device, intermcu_t::enabled, imcu_msg_buf, intermcu_parse_msg(), intermcu_t::msg_available, and intermcu_t::transport.
Here is the call graph for this function: 1.8.8
1.8.8