|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
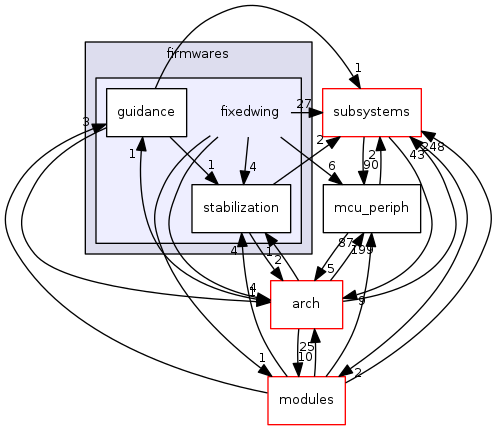
 Directory dependency graph for fixedwing:
Directory dependency graph for fixedwing:Directories | |
| directory | guidance |
| directory | stabilization |
Files | |
| file | ap_downlink.c [code] |
| file | autopilot.c [code] |
| Fixedwing autopilot inititalization. | |
| file | autopilot.h [code] |
| Fixedwing autopilot modes. | |
| file | fbw_datalink.c [code] |
| Datalink through FBW (FlyByWire) process/mcu. | |
| file | fbw_datalink.h [code] |
| Handling of messages coming from ground in FTD. | |
| file | fbw_downlink.c [code] |
| file | fixedwing_datalink.c [code] |
| Handling of messages coming from ground and other A/Cs. | |
| file | joystick.h [code] |
| file | main.c [code] |
| Main loop used both on single and dual MCU configuration. | |
| file | main_ap.c [code] |
| AP ( AutoPilot ) tasks. | |
| file | main_ap.h [code] |
| AP ( AutoPilot ) process API. | |
| file | main_chibios.c [code] |
| file | main_chibios.h [code] |
| file | main_fbw.c [code] |
| FBW ( FlyByWire ) process. | |
| file | main_fbw.h [code] |
| FBW ( FlyByWire ) process API. | |
| file | nav.c [code] |
| Fixedwing functions to compute navigation. | |
| file | nav.h [code] |
| Fixedwing Navigation library. | |
 1.8.8
1.8.8