|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Fixedwing autopilot modes. More...
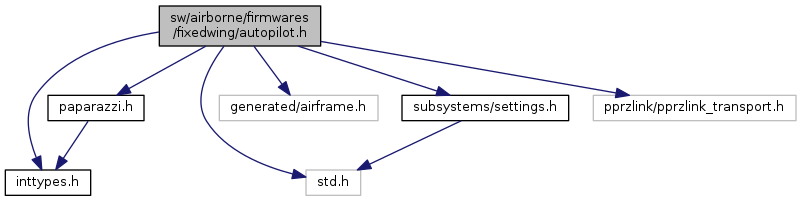
#include <inttypes.h>#include "std.h"#include "paparazzi.h"#include "generated/airframe.h"#include "subsystems/settings.h"#include "pprzlink/pprzlink_transport.h" Include dependency graph for autopilot.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | autopilot_init (void) |
| Autopilot inititalization. More... | |
| void | autopilot_send_mode (void) |
| Send mode over telemetry. More... | |
| static void | autopilot_StoreSettings (float store) |
| static void | autopilot_ClearSettings (float clear) |
| void | send_autopilot_version (struct transport_tx *trans, struct link_device *dev) |
Variables | |
| uint8_t | pprz_mode |
| bool | kill_throttle |
| uint8_t | mcu1_status |
| uint16_t | autopilot_flight_time |
| flight time in seconds. More... | |
| uint8_t | lateral_mode |
| uint16_t | vsupply |
| Supply voltage in deciVolt. More... | |
| int32_t | current |
| Supply current in milliAmpere. More... | |
| float | energy |
| Energy consumption (mAh) This is the ap copy of the measurement from fbw. More... | |
| bool | launch |
| bool | gps_lost |
| bool | power_switch |
| Power switch control. More... | |
Fixedwing autopilot modes.
Definition in file autopilot.h.
| #define autopilot_ResetFlightTimeAndLaunch | ( | _ | ) |
Definition at line 68 of file autopilot.h.
| #define autopilot_SetPowerSwitch | ( | _x | ) | { power_switch = _x; } |
Definition at line 128 of file autopilot.h.
| #define CONTROL_FREQUENCY 60 |
Definition at line 140 of file autopilot.h.
Referenced by init_ap(), and v_ctl_landing_loop().
| #define FLOAT_OF_PPRZ | ( | pprz, | |
| center, | |||
| travel | |||
| ) | ((float)pprz / (float)MAX_PPRZ * travel + center) |
Definition at line 82 of file autopilot.h.
Referenced by telecommand_task().
| #define LATERAL_MODE_COURSE 3 |
Definition at line 77 of file autopilot.h.
Referenced by fly_to_xy(), and navigation_task().
| #define LATERAL_MODE_MANUAL 0 |
Definition at line 74 of file autopilot.h.
Referenced by autopilot_init().
| #define LATERAL_MODE_NB 4 |
Definition at line 78 of file autopilot.h.
| #define LATERAL_MODE_ROLL 2 |
Definition at line 76 of file autopilot.h.
Referenced by fly_to_xy(), nav_without_gps(), and v_ctl_landing_loop().
| #define LATERAL_MODE_ROLL_RATE 1 |
Definition at line 75 of file autopilot.h.
| #define ModeUpdate | ( | _mode, | |
| _value | |||
| ) |
Assignment, returning _old_value != _value Using GCC expression statements.
Definition at line 107 of file autopilot.h.
Referenced by pprz_mode_update().
| #define NAVIGATION_FREQUENCY 4 |
Definition at line 145 of file autopilot.h.
Referenced by init_ap().
| #define PPRZ_MODE_AUTO1 1 |
Definition at line 51 of file autopilot.h.
Referenced by cam_periodic(), mavlink_send_heartbeat(), periodic_auto1_commands(), pprz_mode_update(), and telecommand_task().
| #define PPRZ_MODE_AUTO2 2 |
Definition at line 52 of file autopilot.h.
Referenced by attitude_loop(), autopilot_init(), cam_periodic(), mavlink_send_heartbeat(), navigation_task(), pprz_mode_update(), takeoff_detect_periodic(), telecommand_task(), and vPoint().
| #define PPRZ_MODE_GPS_OUT_OF_ORDER 4 |
Definition at line 54 of file autopilot.h.
Referenced by navigation_task(), pprz_mode_update(), and telecommand_task().
| #define PPRZ_MODE_HOME 3 |
Definition at line 53 of file autopilot.h.
Referenced by mavlink_send_heartbeat(), navigation_task(), pprz_mode_update(), and telecommand_task().
| #define PPRZ_MODE_MANUAL 0 |
AP modes.
Definition at line 50 of file autopilot.h.
Referenced by h_ctl_pitch_loop(), h_ctl_roll_loop(), mavlink_send_heartbeat(), pprz_mode_update(), telecommand_task(), v_ctl_set_pitch(), and v_ctl_set_throttle().
| #define PPRZ_MODE_NB 5 |
Definition at line 55 of file autopilot.h.
| #define PPRZ_MODE_OF_PULSE | ( | pprz | ) |
Definition at line 57 of file autopilot.h.
Referenced by pprz_mode_update().
| #define STICK_PUSHED | ( | pprz | ) | (pprz < THRESHOLD1 || pprz > THRESHOLD2) |
Definition at line 81 of file autopilot.h.
| #define THRESHOLD1 THRESHOLD_MANUAL_PPRZ |
Definition at line 45 of file autopilot.h.
| #define THRESHOLD2 (MAX_PPRZ/2) |
Definition at line 46 of file autopilot.h.
Referenced by pprz_mode_update().
| #define THRESHOLD_MANUAL_PPRZ (MIN_PPRZ / 2) |
Threshold for RC mode detection.
Definition at line 44 of file autopilot.h.
Definition at line 84 of file autopilot.h.
Referenced by telecommand_task().
|
inlinestatic |
Definition at line 159 of file autopilot.h.
References kill_throttle, settings_clear(), and settings_clear_flag.
Here is the call graph for this function:| void autopilot_init | ( | void | ) |
Autopilot inititalization.
Definition at line 175 of file autopilot.c.
| void autopilot_send_mode | ( | void | ) |
Send mode over telemetry.
Definition at line 167 of file autopilot.c.
References DefaultChannel, DefaultDevice, and send_mode().
Referenced by navigation_task(), and telecommand_task().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 151 of file autopilot.h.
References kill_throttle, settings_store(), and settings_store_flag.
Here is the call graph for this function:| void send_autopilot_version | ( | struct transport_tx * | trans, |
| struct link_device * | dev | ||
| ) |
Definition at line 64 of file autopilot.c.
| uint16_t autopilot_flight_time |
flight time in seconds.
Definition at line 48 of file autopilot.c.
| int32_t current |
Supply current in milliAmpere.
This the ap copy of the measurement from fbw
Definition at line 53 of file autopilot.c.
Referenced by send_bat(), send_energy(), and telecommand_task().
| float energy |
Energy consumption (mAh) This is the ap copy of the measurement from fbw.
Definition at line 54 of file autopilot.c.
Referenced by generic_com_periodic(), send_bat(), send_energy(), and telecommand_task().
| bool gps_lost |
Definition at line 56 of file autopilot.c.
Referenced by autopilot_init(), and navigation_task().
| bool kill_throttle |
Definition at line 42 of file autopilot.c.
Referenced by autopilot_ClearSettings(), and autopilot_StoreSettings().
| uint8_t lateral_mode |
Definition at line 50 of file autopilot.c.
Referenced by autopilot_init(), fly_to_xy(), nav_without_gps(), navigation_task(), send_mode(), and v_ctl_landing_loop().
| bool launch |
Definition at line 38 of file sim_ap.c.
Referenced by attitude_loop(), autopilot_init(), Drift_correction(), h_ctl_course_loop(), h_ctl_pitch_loop(), h_ctl_roll_loop(), monitor_task(), nav_catapult_highrate_module(), navigation_task(), nps_autopilot_run_step(), nps_fdm_run_step(), takeoff_detect_periodic(), telecommand_task(), v_ctl_climb_loop(), v_ctl_set_pitch(), and v_ctl_set_throttle().
| uint8_t mcu1_status |
Definition at line 43 of file autopilot.c.
Referenced by mcu1_status_update(), and send_mode().
| bool power_switch |
| uint8_t pprz_mode |
Definition at line 41 of file autopilot.c.
Referenced by attitude_loop(), autopilot_init(), cam_periodic(), generic_com_periodic(), h_ctl_pitch_loop(), h_ctl_roll_loop(), mavlink_send_heartbeat(), navigation_task(), periodic_auto1_commands(), pprz_mode_update(), send_mode(), takeoff_detect_periodic(), telecommand_task(), v_ctl_set_pitch(), v_ctl_set_throttle(), and vPoint().
| uint16_t vsupply |
Supply voltage in deciVolt.
This the ap copy of the measurement from fbw
Definition at line 52 of file autopilot.c.
Referenced by attitude_loop(), gsm_send_report_continue(), monitor_task(), send_bat(), send_energy(), and telecommand_task().
 1.8.8
1.8.8