|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Fixedwing autopilot inititalization. More...
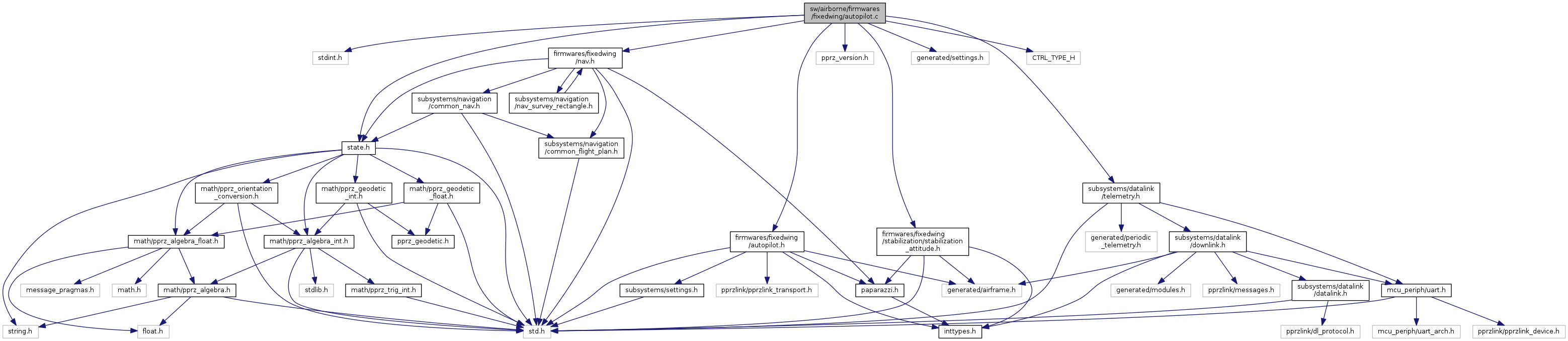
#include <stdint.h>#include "firmwares/fixedwing/autopilot.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include "pprz_version.h"#include "subsystems/datalink/telemetry.h"#include "generated/settings.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include <CTRL_TYPE_H> Include dependency graph for autopilot.c:
Include dependency graph for autopilot.c:Go to the source code of this file.
Functions | |
| void | send_autopilot_version (struct transport_tx *trans, struct link_device *dev) |
| static void | send_alive (struct transport_tx *trans, struct link_device *dev) |
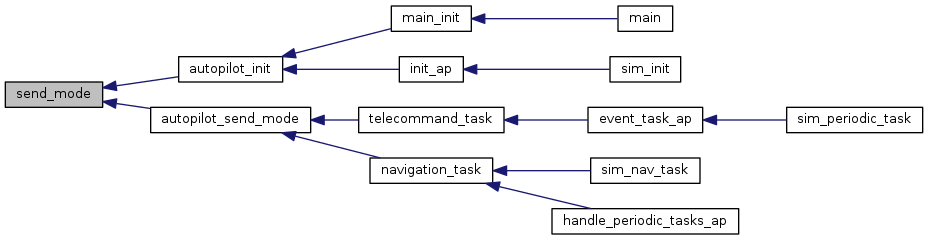
| static void | send_mode (struct transport_tx *trans, struct link_device *dev) |
| static void | send_attitude (struct transport_tx *trans, struct link_device *dev) |
| static void | send_estimator (struct transport_tx *trans, struct link_device *dev) |
| static void | send_bat (struct transport_tx *trans, struct link_device *dev) |
| static void | send_energy (struct transport_tx *trans, struct link_device *dev) |
| static void | send_dl_value (struct transport_tx *trans, struct link_device *dev) |
| static void | send_desired (struct transport_tx *trans, struct link_device *dev) |
| static void | send_airspeed (struct transport_tx *trans, struct link_device *dev) |
| void | autopilot_send_mode (void) |
| Send mode over telemetry. More... | |
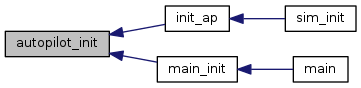
| void | autopilot_init (void) |
| Autopilot inititalization. More... | |
Variables | |
| uint8_t | pprz_mode |
| bool | kill_throttle |
| uint8_t | mcu1_status |
| bool | launch |
| uint16_t | autopilot_flight_time |
| flight time in seconds. More... | |
| uint8_t | lateral_mode |
| uint16_t | vsupply |
| Supply voltage in deciVolt. More... | |
| int32_t | current |
| Supply current in milliAmpere. More... | |
| float | energy |
| Energy consumption (mAh) This is the ap copy of the measurement from fbw. More... | |
| bool | gps_lost |
| bool | power_switch |
| Power switch control. More... | |
| uint8_t | rc_settings_mode = 0 |
Fixedwing autopilot inititalization.
Definition in file autopilot.c.
| void autopilot_init | ( | void | ) |
Autopilot inititalization.
Definition at line 175 of file autopilot.c.
Referenced by init_ap(), and main_init().
Here is the caller graph for this function:| void autopilot_send_mode | ( | void | ) |
Send mode over telemetry.
Definition at line 167 of file autopilot.c.
References DefaultChannel, DefaultDevice, and send_mode().
Referenced by navigation_task(), and telecommand_task().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 152 of file autopilot.c.
References stateGetAirspeed_f(), v_ctl_auto_airspeed_controlled, v_ctl_auto_airspeed_setpoint, and v_ctl_auto_groundspeed_setpoint.
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 71 of file autopilot.c.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 94 of file autopilot.c.
References FloatEulers::phi, FloatEulers::psi, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:| void send_autopilot_version | ( | struct transport_tx * | trans, |
| struct link_device * | dev | ||
| ) |
Definition at line 64 of file autopilot.c.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 107 of file autopilot.c.
References autopilot_flight_time, block_time, current, energy, kill_throttle, stage_time, v_ctl_throttle_slewed, and vsupply.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 141 of file autopilot.c.
References desired_x, desired_y, h_ctl_course_setpoint, h_ctl_pitch_loop_setpoint, h_ctl_roll_setpoint, v_ctl_altitude_setpoint, v_ctl_auto_airspeed_setpoint, and v_ctl_climb_setpoint.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 133 of file autopilot.c.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 121 of file autopilot.c.
References current, energy, and vsupply.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 101 of file autopilot.c.
References stateGetPositionUtm_f(), and stateGetSpeedEnu_f().
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 88 of file autopilot.c.
References horizontal_mode, lateral_mode, mcu1_status, pprz_mode, and v_ctl_mode.
Referenced by autopilot_init(), and autopilot_send_mode().
Here is the caller graph for this function:| uint16_t autopilot_flight_time |
flight time in seconds.
Definition at line 48 of file autopilot.c.
Referenced by attitude_loop(), autopilot_init(), generic_com_periodic(), gsm_send_report_continue(), main_periodic(), mf_daq_send_state(), monitor_task(), nav_check_wp_time(), parse_mf_daq_msg(), send_bat(), send_fp(), and telecommand_task().
| int32_t current |
Supply current in milliAmpere.
This the ap copy of the measurement from fbw
Definition at line 53 of file autopilot.c.
Referenced by send_bat(), send_energy(), and telecommand_task().
| float energy |
Energy consumption (mAh) This is the ap copy of the measurement from fbw.
Definition at line 54 of file autopilot.c.
Referenced by generic_com_periodic(), send_bat(), send_energy(), and telecommand_task().
| bool gps_lost |
Definition at line 56 of file autopilot.c.
Referenced by autopilot_init(), and navigation_task().
| bool kill_throttle |
Definition at line 42 of file autopilot.c.
Referenced by attitude_loop(), autopilot_init(), autopilot_on_rc_frame(), autopilot_set_motors_on(), electrical_periodic(), geo_mag_periodic(), mavlink_send_heartbeat(), monitor_task(), nav_bungee_takeoff_run(), nav_bungee_takeoff_setup(), nav_launcher_run(), nav_launcher_setup(), nav_skid_landing_run(), nps_autopilot_run_step(), send_bat(), v_ctl_climb_loop(), and v_ctl_landing_loop().
| uint8_t lateral_mode |
Definition at line 50 of file autopilot.c.
Referenced by autopilot_init(), fly_to_xy(), nav_without_gps(), navigation_task(), send_mode(), and v_ctl_landing_loop().
| bool launch |
Definition at line 45 of file autopilot.c.
Referenced by autopilot_init().
| uint8_t mcu1_status |
Definition at line 43 of file autopilot.c.
Referenced by mcu1_status_update(), and send_mode().
| bool power_switch |
| uint8_t pprz_mode |
Definition at line 41 of file autopilot.c.
Referenced by attitude_loop(), autopilot_init(), cam_periodic(), generic_com_periodic(), h_ctl_pitch_loop(), h_ctl_roll_loop(), mavlink_send_heartbeat(), navigation_task(), periodic_auto1_commands(), pprz_mode_update(), send_mode(), takeoff_detect_periodic(), telecommand_task(), v_ctl_set_pitch(), v_ctl_set_throttle(), and vPoint().
| uint8_t rc_settings_mode = 0 |
Definition at line 85 of file autopilot.c.
| uint16_t vsupply |
Supply voltage in deciVolt.
This the ap copy of the measurement from fbw
Definition at line 52 of file autopilot.c.
Referenced by attitude_loop(), gsm_send_report_continue(), monitor_task(), send_bat(), send_energy(), and telecommand_task().
 1.8.8
1.8.8