|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
FBW ( FlyByWire ) process. More...
#include "firmwares/fixedwing/main_fbw.h"#include "generated/airframe.h"#include "mcu.h"#include "mcu_periph/sys_time.h"#include "subsystems/commands.h"#include "subsystems/actuators.h"#include "subsystems/electrical.h"#include "subsystems/radio_control.h"#include "firmwares/fixedwing/autopilot.h"#include "paparazzi.h"#include "mcu_periph/i2c.h"#include "mcu_periph/uart.h"#include "subsystems/datalink/telemetry.h"#include "inter_mcu.h"#include "link_mcu.h" Include dependency graph for main_fbw.c:
Include dependency graph for main_fbw.c:Go to the source code of this file.
Functions | |
| void | radio_lost_mode (void) |
| Defines behavior when the RC is lost, default goes to AUTO. More... | |
| static void | handle_rc_frame (void) |
| void | radio_control_event (void) |
| void | radio_control_periodic_handle (void) |
| void | fbw_datalink_periodic_handle (void) |
| void | fbw_datalink_event_handle (void) |
| void | update_actuators (void) |
| void | inter_mcu_periodic_handle (void) |
| void | inter_mcu_event_handle (void) |
| static void | send_commands (struct transport_tx *trans, struct link_device *dev) |
| static void | send_fbw_status (struct transport_tx *trans, struct link_device *dev) |
| static void | send_rc (struct transport_tx *trans, struct link_device *dev) |
| void | periodic_telemetry_handle (void) |
| void | init_fbw (void) |
| void | event_task_fbw (void) |
| void | periodic_task_fbw (void) |
| void | handle_periodic_tasks_fbw (void) |
Variables | |
| uint8_t | fbw_mode |
| pprz_t | command_roll_trim |
| Trim commands for roll, pitch and yaw. More... | |
| pprz_t | command_pitch_trim |
| pprz_t | command_yaw_trim |
| volatile uint8_t | fbw_new_actuators = 0 |
| uint8_t | ap_has_been_ok = false |
| tid_t | fbw_periodic_tid |
| id for periodic_task_fbw() timer More... | |
| tid_t | electrical_tid |
| id for electrical_periodic() timer More... | |
FBW ( FlyByWire ) process.
This process is responsible for decoding radio control, generating actuators signals either from the radio control or from the commands provided by the AP (autopilot) process. It also performs a telemetry task and a low level monitoring ( for parameters like the supply )
Definition in file main_fbw.c.
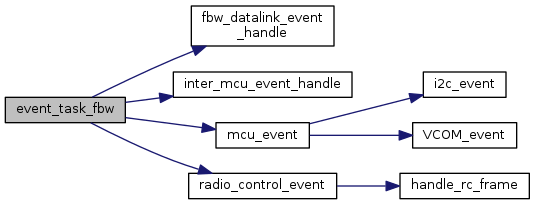
| void event_task_fbw | ( | void | ) |
Definition at line 422 of file main_fbw.c.
References fbw_datalink_event_handle(), inter_mcu_event_handle(), mcu_event(), and radio_control_event().
Referenced by sim_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function:| void fbw_datalink_event_handle | ( | void | ) |
Definition at line 150 of file main_fbw.c.
Referenced by event_task_fbw().
Here is the caller graph for this function:| void fbw_datalink_periodic_handle | ( | void | ) |
Definition at line 149 of file main_fbw.c.
Referenced by periodic_task_fbw().
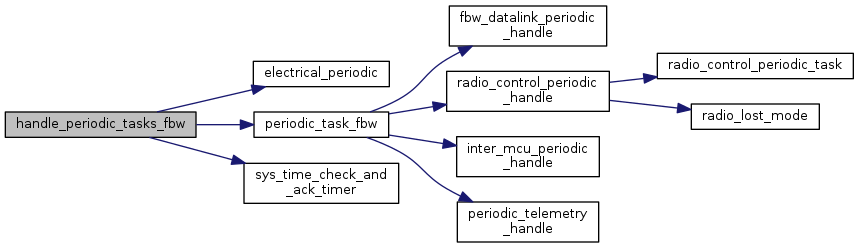
Here is the caller graph for this function:| void handle_periodic_tasks_fbw | ( | void | ) |
Definition at line 446 of file main_fbw.c.
References electrical_periodic(), electrical_tid, fbw_periodic_tid, periodic_task_fbw(), and sys_time_check_and_ack_timer().
Here is the call graph for this function:
|
inlinestatic |
Definition at line 112 of file main_fbw.c.
References commands, fbw_mode, FBW_MODE_MANUAL, FBW_MODE_OF_PPRZ, fbw_new_actuators, radio_control, RADIO_MODE, and RadioControl::values.
Referenced by radio_control_event().
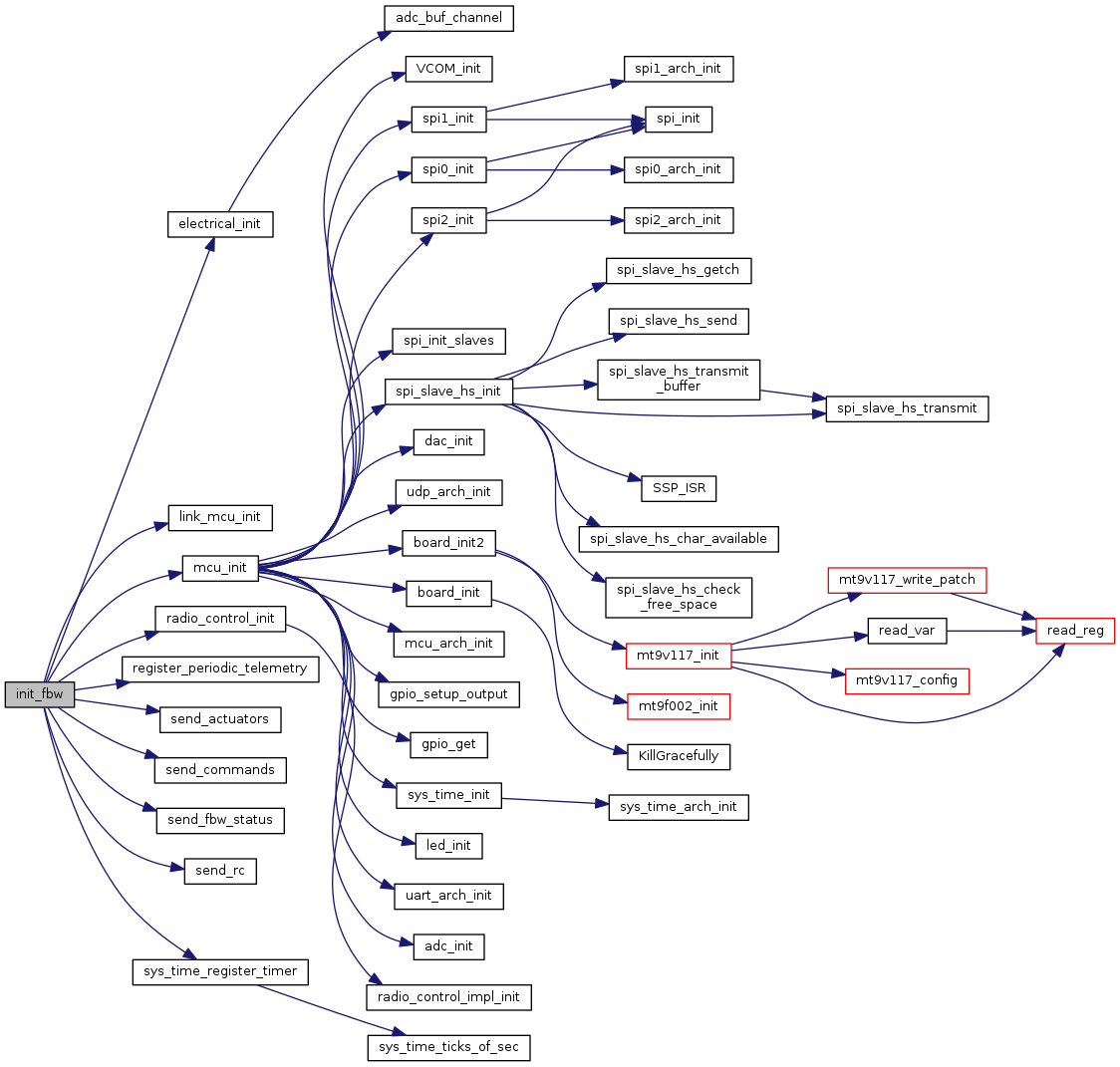
Here is the caller graph for this function:| void init_fbw | ( | void | ) |
Definition at line 363 of file main_fbw.c.
References commands_failsafe, DefaultPeriodic, electrical_init(), electrical_tid, fbw_mode, FBW_MODE_FAILSAFE, fbw_new_actuators, fbw_periodic_tid, link_mcu_init(), mcu_init(), mcu_int_enable, radio_control_init(), register_periodic_telemetry(), send_actuators(), send_commands(), send_fbw_status(), send_rc(), SetCommands, and sys_time_register_timer().
Referenced by sim_init().
Here is the call graph for this function: Here is the caller graph for this function:| void inter_mcu_event_handle | ( | void | ) |
Definition at line 315 of file main_fbw.c.
Referenced by event_task_fbw().
Here is the caller graph for this function:| void inter_mcu_periodic_handle | ( | void | ) |
Definition at line 314 of file main_fbw.c.
Referenced by periodic_task_fbw().
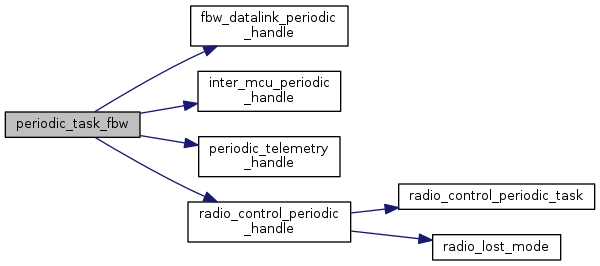
Here is the caller graph for this function:| void periodic_task_fbw | ( | void | ) |
Definition at line 435 of file main_fbw.c.
References fbw_datalink_periodic_handle(), inter_mcu_periodic_handle(), periodic_telemetry_handle(), and radio_control_periodic_handle().
Referenced by handle_periodic_tasks_fbw(), and sim_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function:| void periodic_telemetry_handle | ( | void | ) |
Definition at line 353 of file main_fbw.c.
References DefaultChannel, DefaultDevice, and DefaultPeriodic.
Referenced by periodic_task_fbw().
Here is the caller graph for this function:| void radio_control_event | ( | void | ) |
Definition at line 121 of file main_fbw.c.
References handle_rc_frame(), and RadioControlEvent.
Referenced by event_task_fbw().
Here is the call graph for this function: Here is the caller graph for this function:| void radio_control_periodic_handle | ( | void | ) |
Definition at line 126 of file main_fbw.c.
References fbw_mode, FBW_MODE_MANUAL, radio_control, radio_control_periodic_task(), radio_lost_mode(), RC_REALLY_LOST, and RadioControl::status.
Referenced by periodic_task_fbw().
Here is the call graph for this function: Here is the caller graph for this function:| void radio_lost_mode | ( | void | ) |
Defines behavior when the RC is lost, default goes to AUTO.
Definition at line 88 of file main_fbw.c.
References fbw_mode, and FBW_MODE_AUTO.
Referenced by radio_control_periodic_handle().
Here is the caller graph for this function:
|
static |
Definition at line 320 of file main_fbw.c.
References commands.
Referenced by init_fbw().
Here is the caller graph for this function:
|
static |
Definition at line 326 of file main_fbw.c.
References Electrical::current, electrical, fbw_mode, RadioControl::frame_rate, radio_control, RadioControl::status, and Electrical::vsupply.
Referenced by init_fbw(), and link_mcu_init().
Here is the caller graph for this function:
|
static |
Definition at line 332 of file main_fbw.c.
References radio_control, RADIO_CONTROL_NB_CHANNEL, and RadioControl::values.
Referenced by init_fbw().
Here is the caller graph for this function:| void update_actuators | ( | void | ) |
Definition at line 181 of file main_fbw.c.
| uint8_t ap_has_been_ok = false |
Definition at line 74 of file main_fbw.c.
| pprz_t command_pitch_trim |
Definition at line 69 of file main_fbw.c.
| pprz_t command_roll_trim |
Trim commands for roll, pitch and yaw.
These are updated from the trim commands in ap_state via inter_mcu
Definition at line 68 of file main_fbw.c.
| pprz_t command_yaw_trim |
Definition at line 70 of file main_fbw.c.
| tid_t electrical_tid |
id for electrical_periodic() timer
Definition at line 77 of file main_fbw.c.
Referenced by handle_periodic_tasks(), handle_periodic_tasks_fbw(), init_fbw(), and main_init().
| uint8_t fbw_mode |
Definition at line 63 of file main_fbw.c.
Referenced by fbw_on_ap_command(), fbw_on_rc_frame(), fbw_safety_check(), handle_rc_frame(), init_fbw(), main_init(), main_periodic(), radio_control_periodic_handle(), radio_lost_mode(), send_fbw_status(), and telemetry_periodic().
| volatile uint8_t fbw_new_actuators = 0 |
Definition at line 72 of file main_fbw.c.
Referenced by handle_rc_frame(), and init_fbw().
| tid_t fbw_periodic_tid |
id for periodic_task_fbw() timer
Definition at line 76 of file main_fbw.c.
Referenced by handle_periodic_tasks_fbw(), and init_fbw().
 1.8.8
1.8.8