|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | wind_estimation_quadrotor_params |
Variables | |
| struct wind_estimation_quadrotor_params | we_quad_params |
Definition in file wind_estimation_quadrotor.h.
| struct wind_estimation_quadrotor_params |
Definition at line 29 of file wind_estimation_quadrotor.h.
| Data Fields | ||
|---|---|---|
| float | Q_va | model noise on airspeed |
| float | Q_w | model noise on wind |
| float | R | measurement noise (ground speed) |
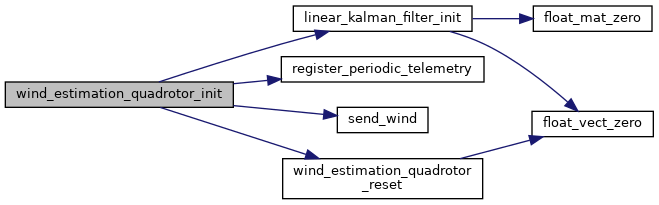
Definition at line 98 of file wind_estimation_quadrotor.c.
References linear_kalman_filter::A, linear_kalman_filter::B, linear_kalman_filter::C, DefaultPeriodic, wind_estimation_quadrotor::filter, foo, linear_kalman_filter_init(), linear_kalman_filter::Q, wind_estimation_quadrotor_params::Q_va, wind_estimation_quadrotor_params::Q_w, linear_kalman_filter::R, wind_estimation_quadrotor_params::R, register_periodic_telemetry(), send_wind(), wind_estimation_quadrotor::status, we_dt, we_quad, WE_QUAD_CMD_SIZE, WE_QUAD_MEAS_SIZE, we_quad_params, WE_QUAD_Q_VA, WE_QUAD_Q_W, WE_QUAD_R, WE_QUAD_STATE_SIZE, WE_QUAD_STATUS_IDLE, and wind_estimation_quadrotor_reset().
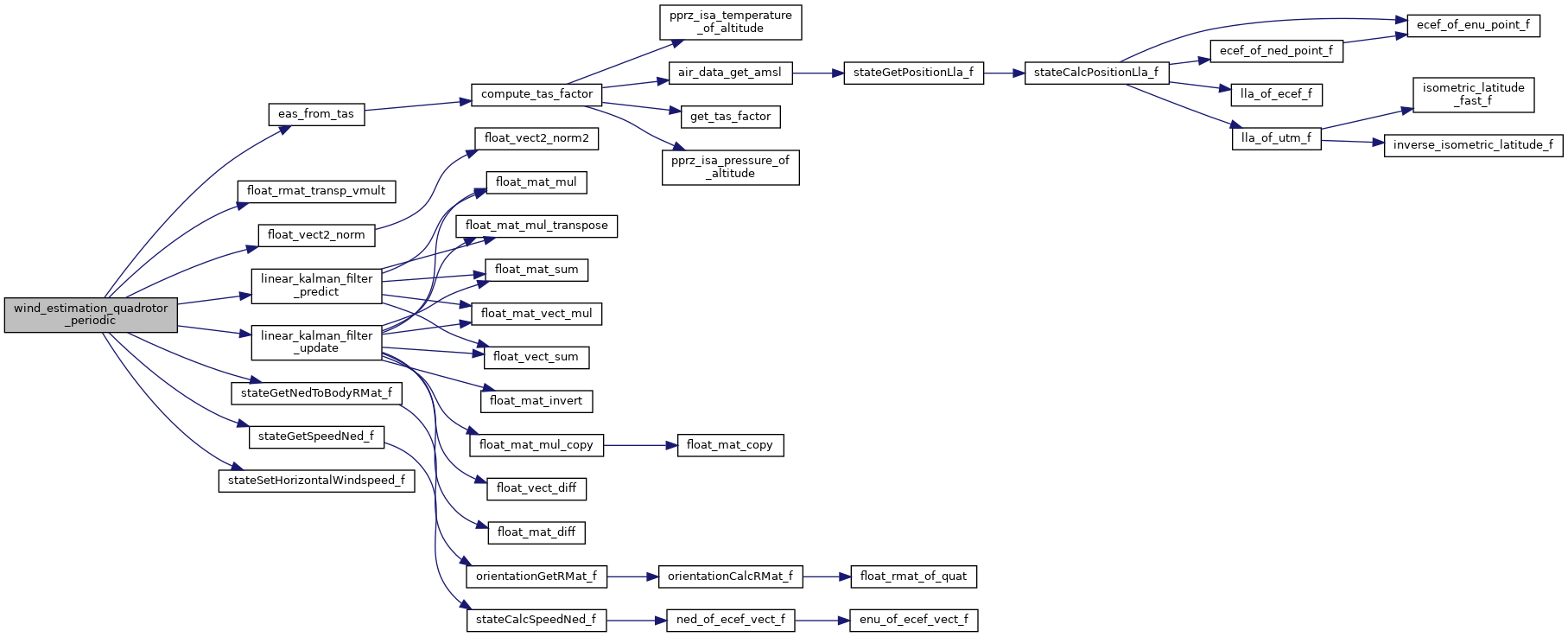
Here is the call graph for this function:Definition at line 133 of file wind_estimation_quadrotor.c.
References AIRSPEED_WE_QUAD_ID, eas_from_tas(), wind_estimation_quadrotor::filter, float_rmat_transp_vmult(), float_vect2_norm(), foo, linear_kalman_filter_predict(), linear_kalman_filter_update(), MAT33_ELMT, PPRZ_ISA_GRAVITY, stateGetNedToBodyRMat_f(), stateGetSpeedNed_f(), stateSetHorizontalWindspeed_f(), we_quad, WE_QUAD_CMD_SIZE, WE_QUAD_MEAS_SIZE, WE_QUAD_VA_X, WE_QUAD_VA_Y, WE_QUAD_W_X, WE_QUAD_W_Y, linear_kalman_filter::X, NedCoor_f::x, and NedCoor_f::y.
Here is the call graph for this function:Definition at line 208 of file wind_estimation_quadrotor.c.
References DefaultChannel, DefaultDevice, wind_estimation_quadrotor::filter, foo, we_quad, WE_QUAD_STATE_SIZE, and linear_kalman_filter::X.
Definition at line 184 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, linear_kalman_filter::Q, wind_estimation_quadrotor_params::Q_va, we_quad, and we_quad_params.
Definition at line 192 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, linear_kalman_filter::Q, wind_estimation_quadrotor_params::Q_w, we_quad, and we_quad_params.
Definition at line 200 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, linear_kalman_filter::R, wind_estimation_quadrotor_params::R, we_quad, and we_quad_params.
Definition at line 178 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::status, we_quad, WE_QUAD_STATUS_RUN, and wind_estimation_quadrotor_reset().
Here is the call graph for this function:Definition at line 169 of file wind_estimation_quadrotor.c.
References foo, stateSetHorizontalWindspeed_f(), wind_estimation_quadrotor::status, we_quad, and WE_QUAD_STATUS_IDLE.
Here is the call graph for this function:
|
extern |
Definition at line 87 of file wind_estimation_quadrotor.c.
Referenced by wind_estimation_quadrotor_init(), wind_estimation_quadrotor_SetQva(), wind_estimation_quadrotor_SetQw(), and wind_estimation_quadrotor_SetR().