|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
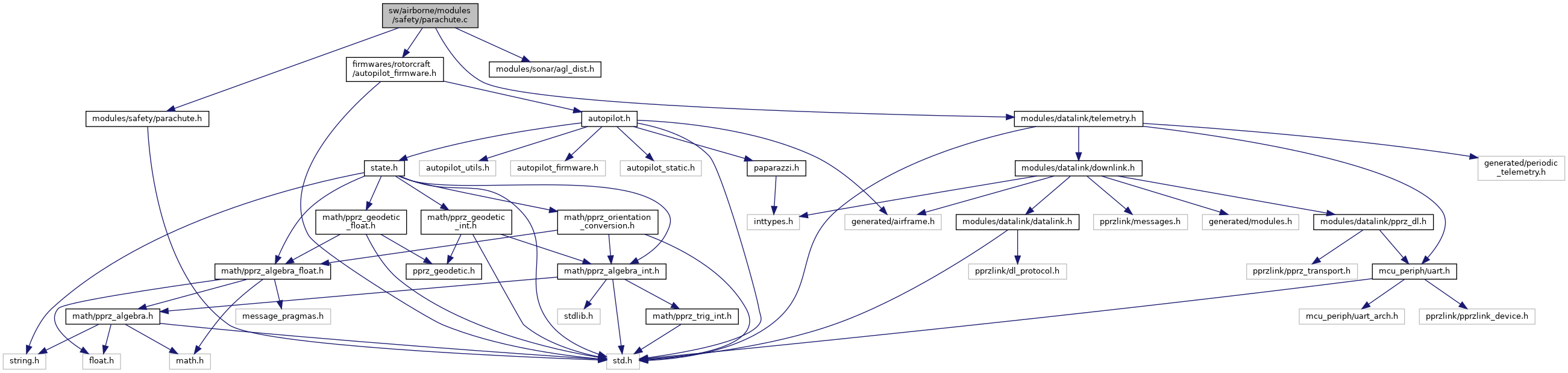
#include "modules/safety/parachute.h"#include "firmwares/rotorcraft/autopilot_firmware.h"#include "modules/sonar/agl_dist.h"#include "modules/datalink/telemetry.h" Include dependency graph for parachute.c:
Include dependency graph for parachute.c:Go to the source code of this file.
Macros | |
| #define | PARACHUTE_AGL_THRESHOLD 6.0 |
| #define | PARACHUTE_AGL_COUNTER_TRIGGER 10 |
| #define | PARACHUTE_ATT_ANGLE_THRESHOLD RadOfDeg(55.f) |
Functions | |
| void | check_parachute_arming (void) |
| void | check_parachute_trigger (void) |
| static void | send_parachute (struct transport_tx *trans, struct link_device *dev) |
| void | init_parachute (void) |
| void | periodic_parachute (void) |
Variables | |
| struct Parachute | parachute |
| bool | close_to_ground = true |
Definition in file parachute.c.
| #define PARACHUTE_AGL_COUNTER_TRIGGER 10 |
Definition at line 35 of file parachute.c.
| #define PARACHUTE_AGL_THRESHOLD 6.0 |
Definition at line 31 of file parachute.c.
Definition at line 40 of file parachute.c.
Definition at line 88 of file parachute.c.
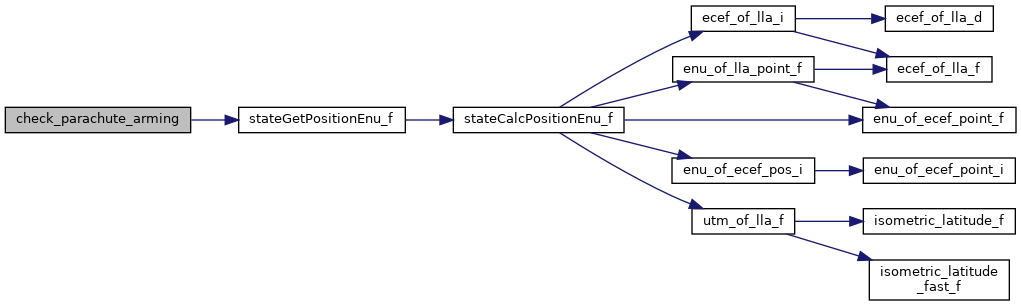
References agl_dist_valid, agl_dist_value_filtered, AP_MODE_RATE_DIRECT, Parachute::armed, autopilot, close_to_ground, foo, pprz_autopilot::mode, parachute, PARACHUTE_AGL_COUNTER_TRIGGER, PARACHUTE_AGL_THRESHOLD, and stateGetPositionEnu_f().
Referenced by periodic_parachute().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 121 of file parachute.c.
References AP_MODE_KILL, autopilot, Parachute::deploy, foo, pprz_autopilot::mode, parachute, PARACHUTE_ATT_ANGLE_THRESHOLD, FloatEulers::phi, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by periodic_parachute().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 59 of file parachute.c.
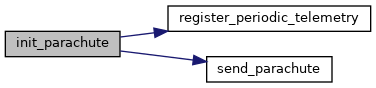
References Parachute::armed, Parachute::arming_method, AUTO, DefaultPeriodic, Parachute::deploy, foo, parachute, register_periodic_telemetry(), and send_parachute().
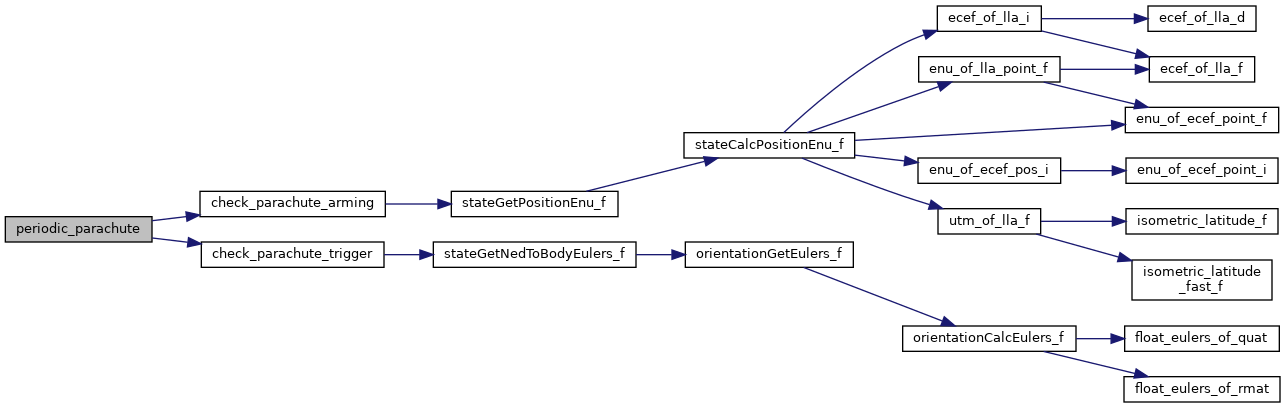
Here is the call graph for this function:Definition at line 71 of file parachute.c.
References Parachute::armed, Parachute::arming_method, AUTO, check_parachute_arming(), check_parachute_trigger(), OFF, and parachute.
Here is the call graph for this function:
|
static |
Definition at line 52 of file parachute.c.
References Parachute::armed, Parachute::arming_method, Parachute::deploy, dev, foo, msg, and parachute.
Referenced by init_parachute().
Here is the caller graph for this function:Definition at line 45 of file parachute.c.
Referenced by check_parachute_arming().
| struct Parachute parachute |
Definition at line 43 of file parachute.c.
Referenced by check_parachute_arming(), check_parachute_trigger(), init_parachute(), periodic_parachute(), and send_parachute().