|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Get data from Cloud Sensor. More...
#include "std.h" Include dependency graph for cloud_sensor.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for cloud_sensor.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | CLOUD_SENSOR_COEF_NONE 0 |
| #define | CLOUD_SENSOR_COEF_SINGLE 1 |
| #define | CLOUD_SENSOR_COEF_ANGSTROM 2 |
Functions | |
| void | cloud_sensor_update_tau (float tau) |
| void | cloud_sensor_init (void) |
| Init function. | |
| void | cloud_sensor_callback (uint8_t *buf) |
| New message/data callback. | |
| void | LWC_callback (uint8_t *buf) |
| void | cloud_sensor_report (void) |
| Report function. | |
Get data from Cloud Sensor.
Definition in file cloud_sensor.h.
| #define CLOUD_SENSOR_COEF_ANGSTROM 2 |
Definition at line 40 of file cloud_sensor.h.
| #define CLOUD_SENSOR_COEF_NONE 0 |
Definition at line 38 of file cloud_sensor.h.
| #define CLOUD_SENSOR_COEF_SINGLE 1 |
Definition at line 39 of file cloud_sensor.h.
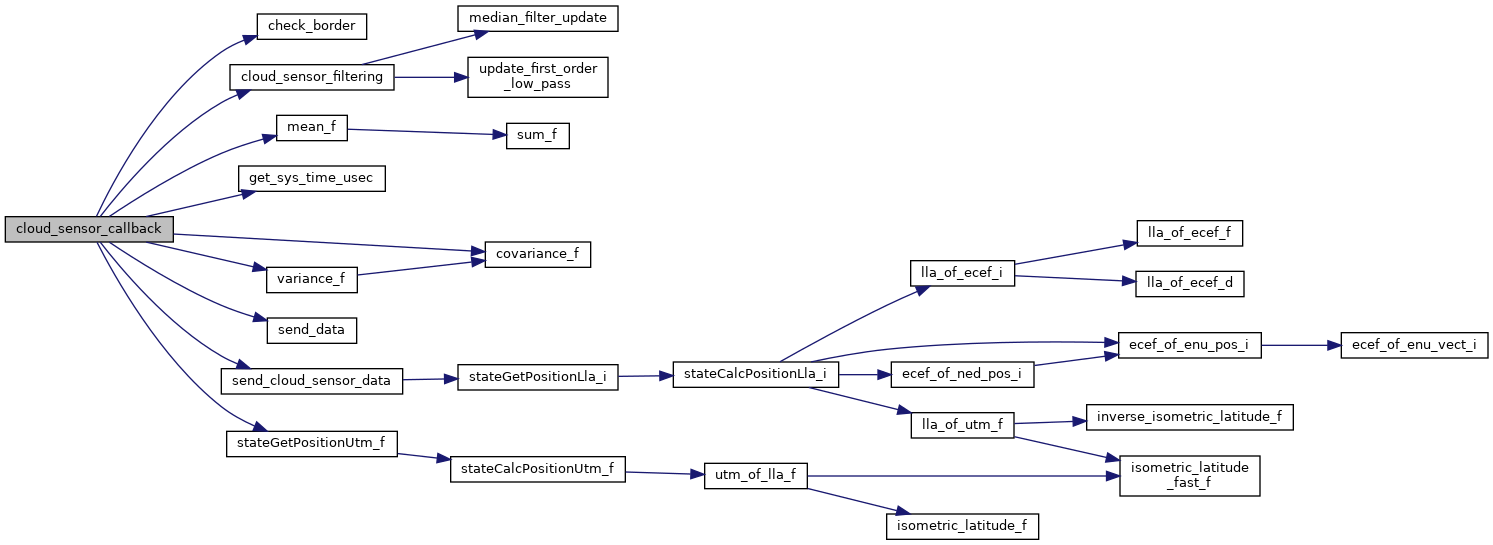
New message/data callback.
New message/data callback.
Definition at line 397 of file cloud_sensor.c.
References angstrom_coef, angstrom_offset, CloudSensor::background, check_border(), cloud_sensor, cloud_sensor_background, CLOUD_SENSOR_BACKGROUND_HYSTERESIS_COEF, CLOUD_SENSOR_BACKGROUND_NB, CLOUD_SENSOR_BACKGROUND_THRESHOLD_COEF, CLOUD_SENSOR_COEF_ANGSTROM, CLOUD_SENSOR_COEF_SINGLE, cloud_sensor_compute_background, cloud_sensor_compute_coef, cloud_sensor_filtering(), cloud_sensor_hysteresis, CLOUD_SENSOR_LOG_FILE, CLOUD_SENSOR_NB, CLOUD_SENSOR_OFFSET, CLOUD_SENSOR_RAW_MAX, CLOUD_SENSOR_SINGLE_CHANNEL, cloud_sensor_threshold, CloudSensor::coef, covariance_f(), UtmCoor_f::east, GpsState::fix, foo, get_sys_time_usec(), gps, GpsFixValid, GpsState::hmsl, Background::idx, idx, LinReg::lambda, log_tagged, lowPassFilter0, Background::mean, mean_f(), medianFilter0, Min, CloudSensor::nb_raw, UtmCoor_f::north, pprzlog_tp, Background::raw, CloudSensor::raw, CloudSensor::reg, send_cloud_sensor_data(), send_data(), stateGetPositionUtm_f(), Background::std, GpsState::tow, CloudSensor::values, LinReg::var_lambda, variance_f(), and GpsState::week.
Here is the call graph for this function:Init function.
Definition at line 290 of file cloud_sensor.c.
References CloudSensor::background, cloud_sensor, cloud_sensor_background, CLOUD_SENSOR_BORDER_HYSTERESIS, CLOUD_SENSOR_BORDER_THRESHOLD, CLOUD_SENSOR_CALIB_ALPHA, cloud_sensor_calib_alpha, CLOUD_SENSOR_CALIB_BETA, cloud_sensor_calib_beta, CLOUD_SENSOR_CHANNEL_SCALE, cloud_sensor_channel_scale, CLOUD_SENSOR_COEF_SINGLE, cloud_sensor_compute_coef, cloud_sensor_hysteresis, CLOUD_SENSOR_NB, CLOUD_SENSOR_TAU, cloud_sensor_tau, cloud_sensor_threshold, CloudSensor::coef, MedianFilter::current, foo, Background::idx, init_first_order_low_pass(), CloudSensor::inside_cloud, LinReg::lambda, lambdas, MedianFilter::length, log_tagged, lowPassFilter0, Background::mean, medianFilter0, CloudSensor::nb_raw, CloudSensor::reg, Background::std, CloudSensor::values, LinReg::var_lambda, and variance_f().
Here is the call graph for this function:Report function.
Definition at line 547 of file cloud_sensor.c.
References DefaultChannel, DefaultDevice, and send_cloud_sensor_data().
Here is the call graph for this function:Definition at line 324 of file cloud_sensor.c.
References cloud_sensor_tau, lowPassFilter0, and update_first_order_low_pass_tau().
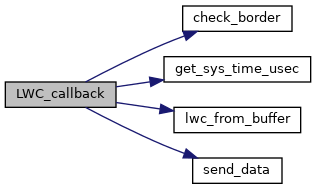
Here is the call graph for this function:Definition at line 532 of file cloud_sensor.c.
References check_border(), cloud_sensor, CloudSensor::coef, dl_buffer, foo, get_sys_time_usec(), lwc_from_buffer(), and send_data().
Here is the call graph for this function:
|
extern |
Definition at line 200 of file cloud_sensor.c.
Referenced by cloud_sensor_callback(), and cloud_sensor_init().
|
extern |
Definition at line 201 of file cloud_sensor.c.
Referenced by cloud_sensor_filtering(), and cloud_sensor_init().
|
extern |
Definition at line 202 of file cloud_sensor.c.
Referenced by cloud_sensor_filtering(), and cloud_sensor_init().
|
extern |
Definition at line 203 of file cloud_sensor.c.
Referenced by cloud_sensor_filtering(), and cloud_sensor_init().
|
extern |
Definition at line 197 of file cloud_sensor.c.
Referenced by cloud_sensor_callback().
|
extern |
variables for settings
variables for settings
Definition at line 196 of file cloud_sensor.c.
Referenced by cloud_sensor_callback(), and cloud_sensor_init().
|
extern |
Definition at line 199 of file cloud_sensor.c.
Referenced by check_border(), cloud_sensor_callback(), and cloud_sensor_init().
|
extern |
Definition at line 204 of file cloud_sensor.c.
Referenced by cloud_sensor_init(), and cloud_sensor_update_tau().
|
extern |
Definition at line 198 of file cloud_sensor.c.
Referenced by check_border(), cloud_sensor_callback(), and cloud_sensor_init().