|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
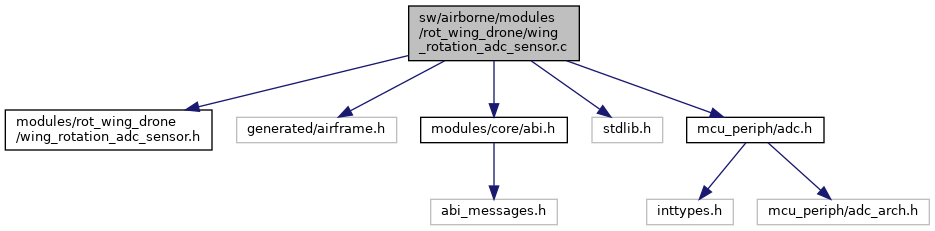
#include "modules/rotwing_drone/wing_rotation_adc_sensor.h"#include "generated/airframe.h"#include "modules/core/abi.h"#include <stdlib.h>#include "mcu_periph/adc.h" Include dependency graph for wing_rotation_adc_sensor.c:
Include dependency graph for wing_rotation_adc_sensor.c:Go to the source code of this file.
Macros | |
| #define | ADC_CHANNEL_WING_ROTATION_CONTROLLER_POSITION ADC_5 |
| #define | ADC_CHANNEL_WING_ROTATION_CONTROLLER_POSITION_NB_SAMPLES 16 |
Functions | |
| void | wing_rotation_adc_init (void) |
| void | wing_rotation_adc_to_deg (void) |
Variables | |
| static struct adc_buf | buf_wing_rot_pos |
Definition in file wing_rotation_adc_sensor.c.
Definition at line 35 of file wing_rotation_adc_sensor.c.
| #define ADC_CHANNEL_WING_ROTATION_CONTROLLER_POSITION_NB_SAMPLES 16 |
Definition at line 39 of file wing_rotation_adc_sensor.c.
Definition at line 60 of file wing_rotation_adc_sensor.c.
References adc_buf_channel(), ADC_CHANNEL_WING_ROTATION_CONTROLLER_POSITION, ADC_CHANNEL_WING_ROTATION_CONTROLLER_POSITION_NB_SAMPLES, and buf_wing_rot_pos.
Here is the call graph for this function:Definition at line 67 of file wing_rotation_adc_sensor.c.
References ACT_FEEDBACK_UAVCAN_ID, adc_buf::av_nb_sample, buf_wing_rot_pos, foo, act_feedback_t::idx, act_feedback_t::act_feedback_set_t::position, act_feedback_t::position, act_feedback_t::set, and adc_buf::sum.
|
static |
Definition at line 58 of file wing_rotation_adc_sensor.c.
Referenced by wing_rotation_adc_init(), and wing_rotation_adc_to_deg().