|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
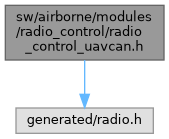
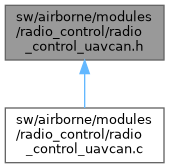
#include "generated/radio.h" Include dependency graph for radio_control_uavcan.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for radio_control_uavcan.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | RC_PPM_TICKS_OF_USEC(_x) (_x) |
| #define | RC_PPM_SIGNED_TICKS_OF_USEC(_x) (_x) |
| #define | USEC_OF_RC_PPM_TICKS(_x) (_x) |
Functions | |
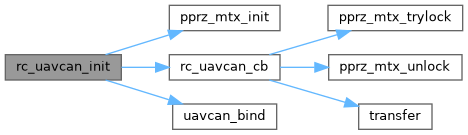
| void | rc_uavcan_init (void) |
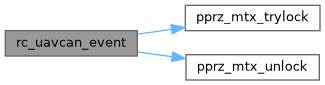
| void | rc_uavcan_event (void) |
Definition in file radio_control_uavcan.h.
Definition at line 18 of file radio_control_uavcan.h.
Definition at line 17 of file radio_control_uavcan.h.
Definition at line 19 of file radio_control_uavcan.h.
Definition at line 46 of file radio_control_uavcan.c.
References foo, RadioControl::frame_cpt, RadioControl::nb_channel, pprz_mtx_trylock(), pprz_mtx_unlock(), radio_control, RADIO_CONTROL_UAVCAN_ID, RadioControl::radio_ok_cpt, rc_dronecan_msg, rc_frame_available, rc_mtx, RC_OK, RadioControl::status, and RadioControl::time_since_last_frame.
Here is the call graph for this function:Definition at line 37 of file radio_control_uavcan.c.
References foo, RadioControl::nb_channel, pprz_mtx_init(), radio_control, rc_frame_available, rc_mtx, rc_uavcan_cb(), rc_uavcan_ev, and uavcan_bind().
Here is the call graph for this function: