|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
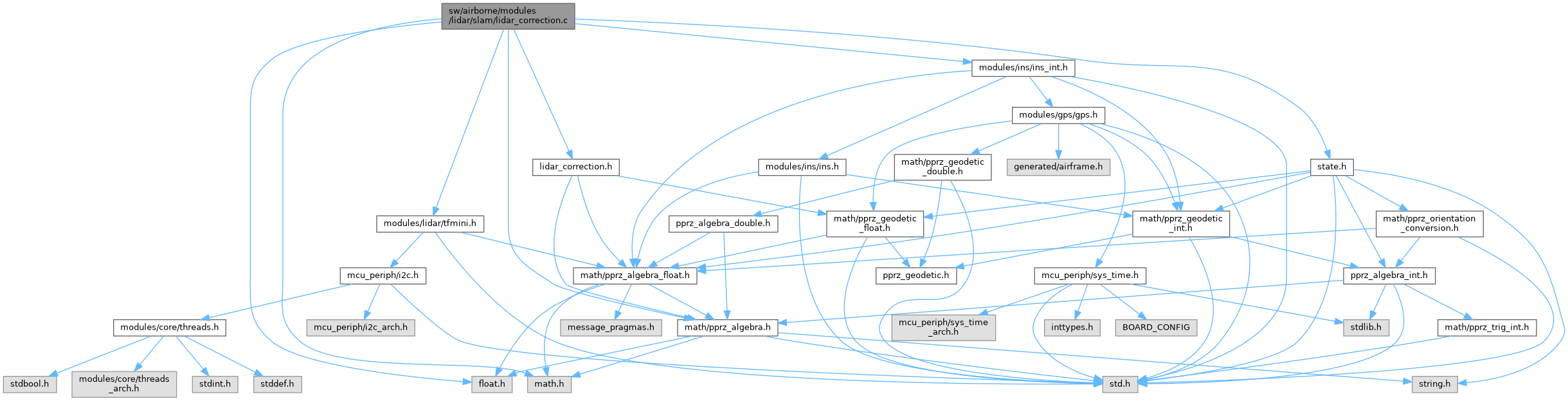
#include "lidar_correction.h"#include "modules/lidar/tfmini.h"#include "modules/ins/ins_int.h"#include "math/pprz_algebra.h"#include <math.h>#include <float.h>#include <state.h> Include dependency graph for lidar_correction.c:
Include dependency graph for lidar_correction.c:Go to the source code of this file.
Functions | |
| float | distance_to_wall (float theta, const struct FloatVect2 *P, const struct FloatVect2 *A, const struct FloatVect2 *B) |
| static float | distance_to_segment (const struct FloatVect2 *P, const struct FloatVect2 *A, const struct FloatVect2 *B, struct FloatVect2 *C) |
| float | find_nearest_wall (const struct FloatVect2 *obstacle_pos, struct FloatVect2 *nearest_point) |
| void | init_walls (void) |
| void | convert_walls_to_ltp (void) |
Variables | |
| struct WallSystem | wall_system |
| const struct WallConfig | obstacle_walls [] = OBSTACLE_WALLS |
Definition at line 168 of file lidar_correction.c.
References Wall::converted, WallSystem::converted_to_ltp, Wall::count, foo, ned_of_lla_point_f(), p, Wall::points_ltp, Wall::points_wgs84, stateGetNedOrigin_f(), stateIsLocalCoordinateValid(), WallSystem::wall_count, wall_system, WallSystem::walls, FloatVect2::x, and FloatVect2::y.
Referenced by ins_update_lidar().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 75 of file lidar_correction.c.
References A, B, foo, P, FloatVect2::x, and FloatVect2::y.
Referenced by find_nearest_wall().
Here is the caller graph for this function:| float distance_to_wall | ( | float | theta, |
| const struct FloatVect2 * | P, | ||
| const struct FloatVect2 * | A, | ||
| const struct FloatVect2 * | B | ||
| ) |
Definition at line 48 of file lidar_correction.c.
References A, B, foo, P, and s.
Referenced by sim_overwrite_lidar().
Here is the caller graph for this function:| float find_nearest_wall | ( | const struct FloatVect2 * | obstacle_pos, |
| struct FloatVect2 * | nearest_point | ||
| ) |
Definition at line 97 of file lidar_correction.c.
References WallSystem::converted_to_ltp, distance_to_segment(), foo, p, WallSystem::wall_count, wall_system, WallSystem::walls, FloatVect2::x, and FloatVect2::y.
Here is the call graph for this function:Definition at line 144 of file lidar_correction.c.
References ObstaclePoint::alt, WallSystem::converted_to_ltp, WallConfig::count, Wall::count, foo, ObstaclePoint::lat_deg, ObstaclePoint::lon_deg, obstacle_walls, p, WallConfig::points, WallSystem::wall_count, wall_system, and WallSystem::walls.
| const struct WallConfig obstacle_walls[] = OBSTACLE_WALLS |
Definition at line 141 of file lidar_correction.c.
Referenced by init_walls().
| struct WallSystem wall_system |
Definition at line 35 of file lidar_correction.c.
Referenced by convert_walls_to_ltp(), find_nearest_wall(), init_walls(), ins_update_lidar(), and sim_overwrite_lidar().