|
Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
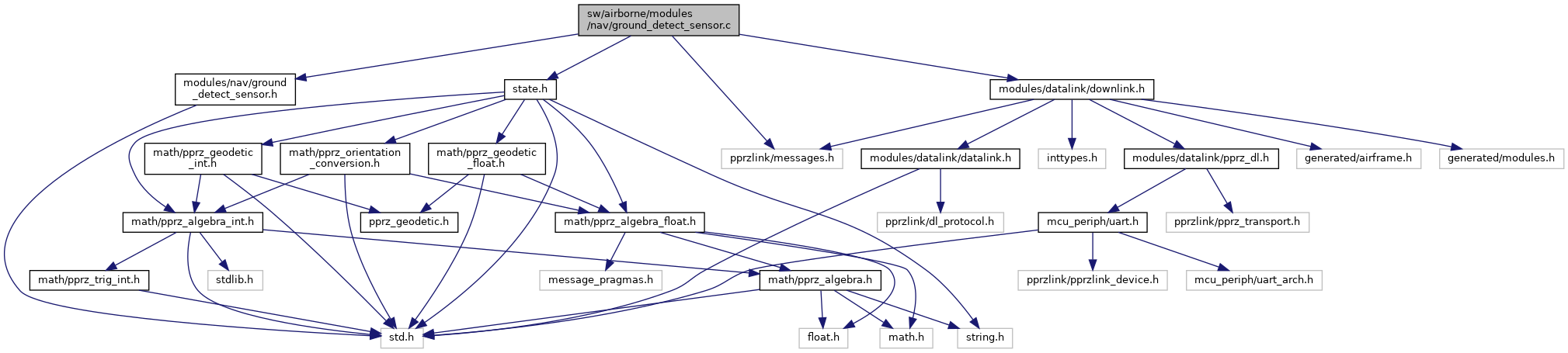
#include "modules/nav/ground_detect_sensor.h"#include "state.h"#include "pprzlink/messages.h"#include "modules/datalink/downlink.h" Include dependency graph for ground_detect_sensor.c:
Include dependency graph for ground_detect_sensor.c:Go to the source code of this file.
Macros | |
| #define | GROUND_DETECT_SENSOR_COUNTER_TRIGGER 10 |
| #define | GROUND_DETECT_SENSOR_SPECIFIC_THRUST_THRESHOLD -5.0 |
Functions | |
| void | ground_detect_sensor_init (void) |
| bool | ground_detect (void) |
| void | ground_detect_sensor_periodic (void) |
Variables | |
| bool | ground_detected = false |
Definition in file ground_detect_sensor.c.
| #define GROUND_DETECT_SENSOR_COUNTER_TRIGGER 10 |
Definition at line 45 of file ground_detect_sensor.c.
| #define GROUND_DETECT_SENSOR_SPECIFIC_THRUST_THRESHOLD -5.0 |
Definition at line 49 of file ground_detect_sensor.c.
| bool ground_detect | ( | void | ) |
Definition at line 58 of file ground_detect_sensor.c.
References ground_detected.
| void ground_detect_sensor_init | ( | void | ) |
Definition at line 53 of file ground_detect_sensor.c.
References ground_detected.
| void ground_detect_sensor_periodic | ( | void | ) |
Definition at line 62 of file ground_detect_sensor.c.
References act_is_servo, actuator_state_filt_vect, agl_dist_valid, agl_dist_value_filtered, DefaultChannel, DefaultDevice, g1g2, GROUND_DETECT_SENSOR_COUNTER_TRIGGER, GROUND_DETECT_SENSOR_SPECIFIC_THRUST_THRESHOLD, ground_detected, stateGetAccelNed_f(), and NedCoor_f::z.
Here is the call graph for this function:| bool ground_detected = false |
Definition at line 41 of file ground_detect_sensor.c.
Referenced by ground_detect(), ground_detect_sensor_init(), and ground_detect_sensor_periodic().