|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
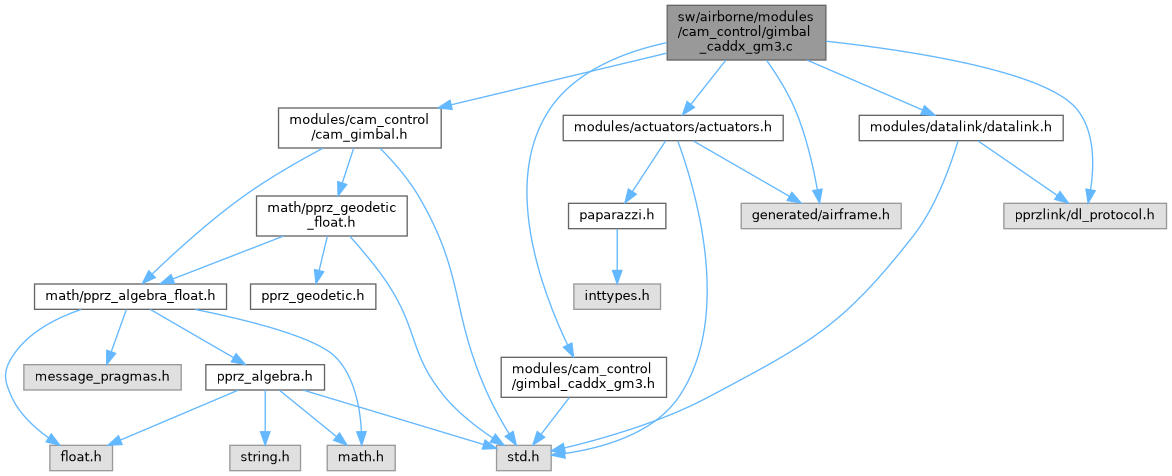
#include "modules/cam_control/gimbal_caddx_gm3.h"#include "modules/cam_control/cam_gimbal.h"#include "modules/actuators/actuators.h"#include "generated/airframe.h"#include "modules/datalink/datalink.h"#include "pprzlink/dl_protocol.h" Include dependency graph for gimbal_caddx_gm3.c:
Include dependency graph for gimbal_caddx_gm3.c:Go to the source code of this file.
Macros | |
| #define | GIMBAL_CADDX_PAN_MAX RadOfDeg(160.f) |
| #define | GIMBAL_CADDX_TILT_MAX RadOfDeg(120.f) |
| #define | GIMBAL_CADDX_ROLL_MAX RadOfDeg(60.f) |
| #define | GIMBAL_CADDX_TILT_OFFSET RadOfDeg(15.f) |
Functions | |
| static void | gimbal_caddx_compute_angles (struct FloatVect3 dir, float *pan, float *tilt) |
| Compute pan and tilt angle for the 3-axis gimbal CaddX GM3. | |
| void | gimbal_caddx_gm3_init (void) |
| void | gimbal_caddx_gm3_periodic (void) |
Variables | |
| float | gimbal_caddx_gm3_roll |
Definition in file gimbal_caddx_gm3.c.
Definition at line 35 of file gimbal_caddx_gm3.c.
Definition at line 37 of file gimbal_caddx_gm3.c.
Definition at line 36 of file gimbal_caddx_gm3.c.
Definition at line 38 of file gimbal_caddx_gm3.c.
|
static |
Compute pan and tilt angle for the 3-axis gimbal CaddX GM3.
The rotations from gimbal to camera frame are: pan (z), roll (x), tilt (y) In addition, an extra mechanical offset exists along the tilt axis between the pan and roll rotations. Considering the wide angle camera and the pain to inverse the resulting equation, this angle is neglected. Therefore, we have: -> sin(tilt) = - uz / cos(roll) -> tan(pan) = (uy / ux) - sin(roll)*tan(tilt)
Definition at line 53 of file gimbal_caddx_gm3.c.
References dir, foo, gimbal_caddx_gm3_roll, and GIMBAL_CADDX_ROLL_MAX.
Referenced by gimbal_caddx_gm3_init().
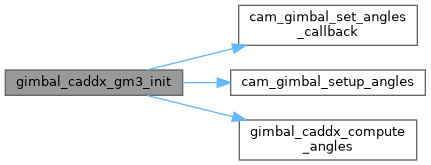
Here is the caller graph for this function:Definition at line 61 of file gimbal_caddx_gm3.c.
References cam_gimbal, cam_gimbal_set_angles_callback(), cam_gimbal_setup_angles(), foo, gimbal_caddx_compute_angles(), gimbal_caddx_gm3_roll, GIMBAL_CADDX_PAN_MAX, GIMBAL_CADDX_TILT_MAX, and MIN_PPRZ.
Here is the call graph for this function:Definition at line 84 of file gimbal_caddx_gm3.c.
References foo, gimbal_caddx_gm3_roll, GIMBAL_CADDX_ROLL_MAX, and MAX_PPRZ.
| float gimbal_caddx_gm3_roll |
Definition at line 41 of file gimbal_caddx_gm3.c.
Referenced by gimbal_caddx_compute_angles(), gimbal_caddx_gm3_init(), and gimbal_caddx_gm3_periodic().