|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
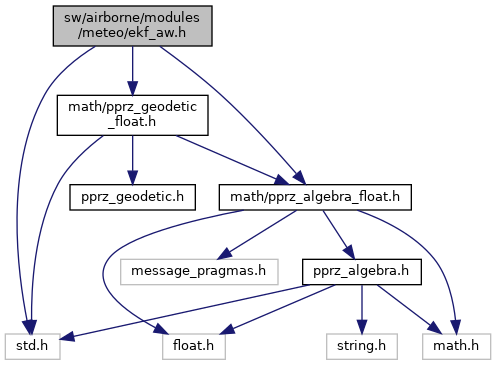
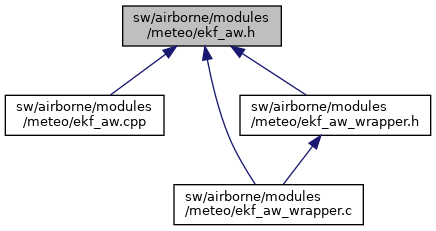
 Include dependency graph for ekf_aw.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ekf_aw.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ekfAwParameters |
| struct | ekfHealth |
Variables | |
| struct ekfAwParameters | ekf_aw_params |
| struct ekfAwParameters |
| Data Fields | ||
|---|---|---|
| float | k_fx_drag[2] | |
| float | k_fx_elev[3] | |
| float | k_fx_fuselage[4] | |
| float | k_fx_hover[3] | |
| float | k_fx_push[3] | |
| float | k_fx_wing[5] | |
| float | k_fy_beta | |
| float | k_fy_v | |
| float | k_fy_wing[5] | |
| float | k_fz_elev[2] | |
| float | k_fz_fuselage[4] | |
| float | k_fz_hover[5] | |
| float | k_fz_wing[4] | |
| bool | propagate_offset | |
| float | Q_accel | accel process noise |
| float | Q_gyro | gyro process noise |
| float | Q_k | offset process noise |
| float | Q_mu | wind process noise |
| bool | quick_convergence | |
| float | R_accel_filt[3] | filtered accel measurement noise |
| float | R_V_gnd | speed measurement noise |
| float | R_V_pitot | airspeed measurement noise |
| bool | use_model[3] | |
| bool | use_pitot | |
| float | vehicle_mass | |
| struct ekfHealth |
Definition at line 1392 of file ekf_aw.cpp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1374 of file ekf_aw.cpp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1295 of file ekf_aw.cpp.
References eawp, and ekfHealth::healthy.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1401 of file ekf_aw.cpp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:
|
extern |
Definition at line 1313 of file ekf_aw.cpp.
References eawp, and FloatVect3::x.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:
|
extern |
Definition at line 1304 of file ekf_aw.cpp.
References eawp, and FloatVect3::x.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1323 of file ekf_aw.cpp.
References eawp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1329 of file ekf_aw.cpp.
References eawp, EKF_AW_R_SIZE, and foo.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1285 of file ekf_aw.cpp.
References eawp, and NedCoor_f::x.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:
|
extern |
Definition at line 1419 of file ekf_aw.cpp.
References ekf_aw_params.
Referenced by ekf_aw_wrapper_init().
Here is the caller graph for this function:Definition at line 1410 of file ekf_aw.cpp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1265 of file ekf_aw.cpp.
References eawp, s, and NedCoor_f::x.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1344 of file ekf_aw.cpp.
References eawp, EKF_AW_COV_SIZE, and foo.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1275 of file ekf_aw.cpp.
References eawp, and NedCoor_f::x.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1383 of file ekf_aw.cpp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:< accel process noise
< gyro process noise
< wind process noise
< offset process noise
< speed measurement noise
< filtered accel measurement noise
< airspeed measurement noise
Definition at line 457 of file ekf_aw.cpp.
References eawp, EKF_AW_K1_FX_DRAG, EKF_AW_K1_FX_ELEV, EKF_AW_K1_FX_FUSELAGE, EKF_AW_K1_FX_HOVER, EKF_AW_K1_FX_PUSH, EKF_AW_K1_FX_WING, EKF_AW_K1_FY_WING, EKF_AW_K1_FZ_ELEV, EKF_AW_K1_FZ_FUSELAGE, EKF_AW_K1_FZ_HOVER, EKF_AW_K1_FZ_WING, EKF_AW_K2_FX_DRAG, EKF_AW_K2_FX_ELEV, EKF_AW_K2_FX_FUSELAGE, EKF_AW_K2_FX_HOVER, EKF_AW_K2_FX_PUSH, EKF_AW_K2_FX_WING, EKF_AW_K2_FY_WING, EKF_AW_K2_FZ_ELEV, EKF_AW_K2_FZ_FUSELAGE, EKF_AW_K2_FZ_HOVER, EKF_AW_K2_FZ_WING, EKF_AW_K3_FX_ELEV, EKF_AW_K3_FX_FUSELAGE, EKF_AW_K3_FX_HOVER, EKF_AW_K3_FX_PUSH, EKF_AW_K3_FX_WING, EKF_AW_K3_FY_WING, EKF_AW_K3_FZ_FUSELAGE, EKF_AW_K3_FZ_HOVER, EKF_AW_K3_FZ_WING, EKF_AW_K4_FX_FUSELAGE, EKF_AW_K4_FX_WING, EKF_AW_K4_FY_WING, EKF_AW_K4_FZ_FUSELAGE, EKF_AW_K4_FZ_HOVER, EKF_AW_K4_FZ_WING, EKF_AW_K5_FX_WING, EKF_AW_K5_FY_WING, EKF_AW_K5_FZ_HOVER, EKF_AW_K_FY_BETA, EKF_AW_K_FY_V, ekf_aw_params, EKF_AW_PROPAGATE_OFFSET, EKF_AW_Q_ACCEL, EKF_AW_Q_GYRO, EKF_AW_Q_MU, EKF_AW_Q_OFFSET, EKF_AW_R_ACCEL_FILT_X, EKF_AW_R_ACCEL_FILT_Y, EKF_AW_R_ACCEL_FILT_Z, EKF_AW_R_V_GND, EKF_AW_R_V_PITOT, EKF_AW_USE_MODEL_BASED_X, EKF_AW_USE_MODEL_BASED_Y, EKF_AW_USE_MODEL_BASED_Z, EKF_AW_USE_PITOT, EKF_AW_VEHICLE_MASS, init_ekf_aw_state(), ekfAwParameters::k_fx_drag, ekfAwParameters::k_fx_elev, ekfAwParameters::k_fx_fuselage, ekfAwParameters::k_fx_hover, ekfAwParameters::k_fx_push, ekfAwParameters::k_fx_wing, ekfAwParameters::k_fy_beta, ekfAwParameters::k_fy_v, ekfAwParameters::k_fy_wing, ekfAwParameters::k_fz_elev, ekfAwParameters::k_fz_fuselage, ekfAwParameters::k_fz_hover, ekfAwParameters::k_fz_wing, ekfAwParameters::propagate_offset, ekfAwParameters::Q_accel, ekfAwParameters::Q_gyro, ekfAwParameters::Q_k, ekfAwParameters::Q_mu, ekfAwParameters::quick_convergence, ekfAwParameters::R_accel_filt, ekfAwParameters::R_V_gnd, ekfAwParameters::R_V_pitot, ekfAwParameters::use_model, ekfAwParameters::use_pitot, and ekfAwParameters::vehicle_mass.
Referenced by ekf_aw_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 591 of file ekf_aw.cpp.
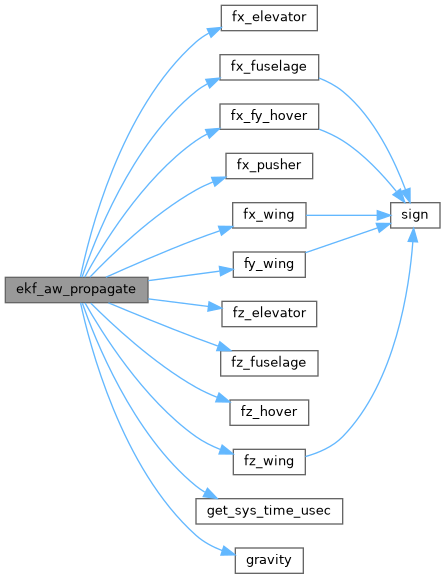
References deg2rad, E, eawp, EKF_AW_AOA_MAX_ANGLE, EKF_AW_AOA_MIN_ANGLE, EKF_AW_AX_SCHED_END_DEG, EKF_AW_AX_SCHED_GAIN, EKF_AW_AX_SCHED_START_DEG, EKF_AW_AZ_QUICK_CONV_ACCEL_GAIN, EKF_AW_AZ_QUICK_CONV_MU_GAIN, EKF_AW_AZ_SCHED_END_DEG, EKF_AW_AZ_SCHED_GAIN, EKF_AW_AZ_SCHED_START_DEG, EKF_AW_COV_SIZE, EKF_AW_DEBUG, EKF_AW_ELEV_MAX_ANGLE, EKF_AW_ELEV_MIN_ANGLE, ekf_aw_params, EKF_AW_Q_mu_x_index, EKF_AW_Q_mu_y_index, EKF_AW_R_a_x_filt_index, EKF_AW_R_a_y_filt_index, EKF_AW_R_a_z_filt_index, EKF_AW_R_SIZE, EKF_AW_SKEW_POLY_0, EKF_AW_SKEW_POLY_1, EKF_AW_SKEW_POLY_2, EKF_AW_WING_INSTALLED, foo, fx_elevator(), fx_fuselage(), fx_fy_hover(), fx_pusher(), fx_wing(), fy_wing(), fz_elevator(), fz_fuselage(), fz_hover(), fz_wing(), get_sys_time_usec(), gravity(), K, ekfAwParameters::k_fx_drag, ekfAwParameters::k_fx_elev, ekfAwParameters::k_fx_fuselage, ekfAwParameters::k_fx_hover, ekfAwParameters::k_fx_push, ekfAwParameters::k_fx_wing, ekfAwParameters::k_fy_beta, ekfAwParameters::k_fy_v, ekfAwParameters::k_fy_wing, ekfAwParameters::k_fz_elev, ekfAwParameters::k_fz_fuselage, ekfAwParameters::k_fz_hover, ekfAwParameters::k_fz_wing, FloatRates::p, p, FloatEulers::phi, ekfAwParameters::propagate_offset, FloatEulers::psi, FloatRates::q, ekfAwParameters::Q_mu, ekfAwParameters::quick_convergence, FloatRates::r, ekfAwParameters::R_accel_filt, FloatEulers::theta, ekfAwParameters::use_model, ekfAwParameters::use_pitot, ekfAwParameters::vehicle_mass, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ekf_aw_wrapper_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 584 of file ekf_aw.cpp.
References init_ekf_aw_state().
Here is the call graph for this function:Definition at line 1447 of file ekf_aw.cpp.
References eawp.
Definition at line 1440 of file ekf_aw.cpp.
Definition at line 1426 of file ekf_aw.cpp.
Referenced by ekf_aw_wrapper_periodic().
Here is the caller graph for this function:Definition at line 1433 of file ekf_aw.cpp.
Definition at line 552 of file ekf_aw.cpp.
References eawp, ekf_aw_params, EKF_AW_Q_accel_x_index, EKF_AW_Q_accel_y_index, EKF_AW_Q_accel_z_index, EKF_AW_Q_gyro_x_index, EKF_AW_Q_gyro_y_index, EKF_AW_Q_gyro_z_index, EKF_AW_Q_k_x_index, EKF_AW_Q_k_y_index, EKF_AW_Q_k_z_index, EKF_AW_Q_mu_x_index, EKF_AW_Q_mu_y_index, EKF_AW_Q_mu_z_index, EKF_AW_R_a_x_filt_index, EKF_AW_R_a_y_filt_index, EKF_AW_R_a_z_filt_index, EKF_AW_R_V_gnd_x_index, EKF_AW_R_V_gnd_y_index, EKF_AW_R_V_gnd_z_index, EKF_AW_R_V_pitot_index, ekfAwParameters::Q_accel, ekfAwParameters::Q_gyro, ekfAwParameters::Q_k, ekfAwParameters::Q_mu, ekfAwParameters::R_accel_filt, ekfAwParameters::R_V_gnd, and ekfAwParameters::R_V_pitot.
Referenced by init_ekf_aw_state().
Here is the caller graph for this function:
|
extern |
Definition at line 377 of file ekf_aw.cpp.
Referenced by ekf_aw_get_param_handle(), ekf_aw_init(), ekf_aw_propagate(), ekf_aw_update_params(), fx_elevator(), fx_fuselage(), fx_fy_hover(), fx_pusher(), fx_wing(), fy_wing(), fz_elevator(), fz_fuselage(), fz_hover(), and fz_wing().