|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | CMH_ACT_MOTOR_RIGHT 0 |
| #define | CMH_ACT_MOTOR_LEFT 1 |
| #define | CMH_ACT_MOTOR_TAIL 2 |
| #define | CMH_ACT_YAW 3 |
Functions | |
| void | control_mixing_heewing_init (void) |
| void | control_mixing_heewing_manual (void) |
| Direct manual control in plane style flight. | |
| void | control_mixing_heewing_attitude_direct (void) |
| Stabilization in attitude direct mode. | |
| void | control_mixing_heewing_attitude_direct_enter (void) |
| void | control_mixing_heewing_attitude_plane (void) |
| void | control_mixing_heewing_attitude_plane_enter (void) |
| void | control_mixing_heewing_nav_enter (void) |
| void | control_mixing_heewing_nav_run (void) |
Definition in file control_mixing_heewing.h.
| #define CMH_ACT_MOTOR_LEFT 1 |
Definition at line 31 of file control_mixing_heewing.h.
| #define CMH_ACT_MOTOR_RIGHT 0 |
Definition at line 30 of file control_mixing_heewing.h.
| #define CMH_ACT_MOTOR_TAIL 2 |
Definition at line 32 of file control_mixing_heewing.h.
| #define CMH_ACT_YAW 3 |
Definition at line 33 of file control_mixing_heewing.h.
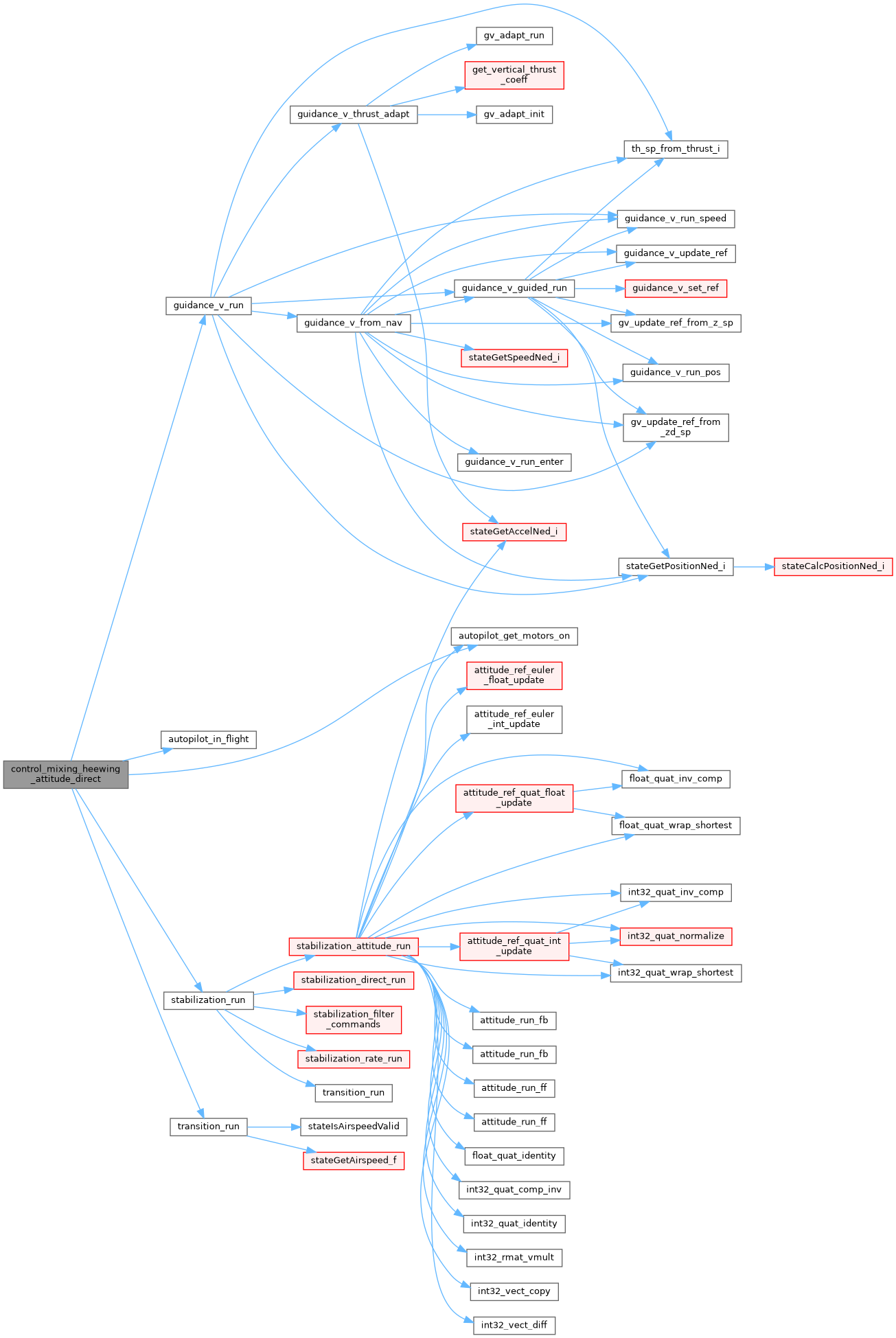
Stabilization in attitude direct mode.
Definition at line 117 of file control_mixing_heewing.c.
References actuators_pprz, autopilot, autopilot_get_motors_on(), autopilot_in_flight(), Stabilization::cmd, CMH_ACT_MOTOR_LEFT, CMH_ACT_MOTOR_RIGHT, CMH_ACT_MOTOR_TAIL, CMH_ACT_YAW, CMH_TILT_VERTICAL, commands, foo, guidance_v_run(), MAX_PPRZ, Stabilization::rc_sp, stabilization, stabilization_run(), pprz_autopilot::throttle, transition_run(), and TRANSITION_TO_HOVER.
Here is the call graph for this function:Definition at line 145 of file control_mixing_heewing.c.
References guidance_h_mode_changed(), GUIDANCE_H_MODE_NONE, guidance_v_mode_changed(), GUIDANCE_V_MODE_RC_DIRECT, STABILIZATION_ATT_SUBMODE_HEADING, STABILIZATION_MODE_ATTITUDE, stabilization_mode_changed(), and STABILIZATION_MODE_NONE.
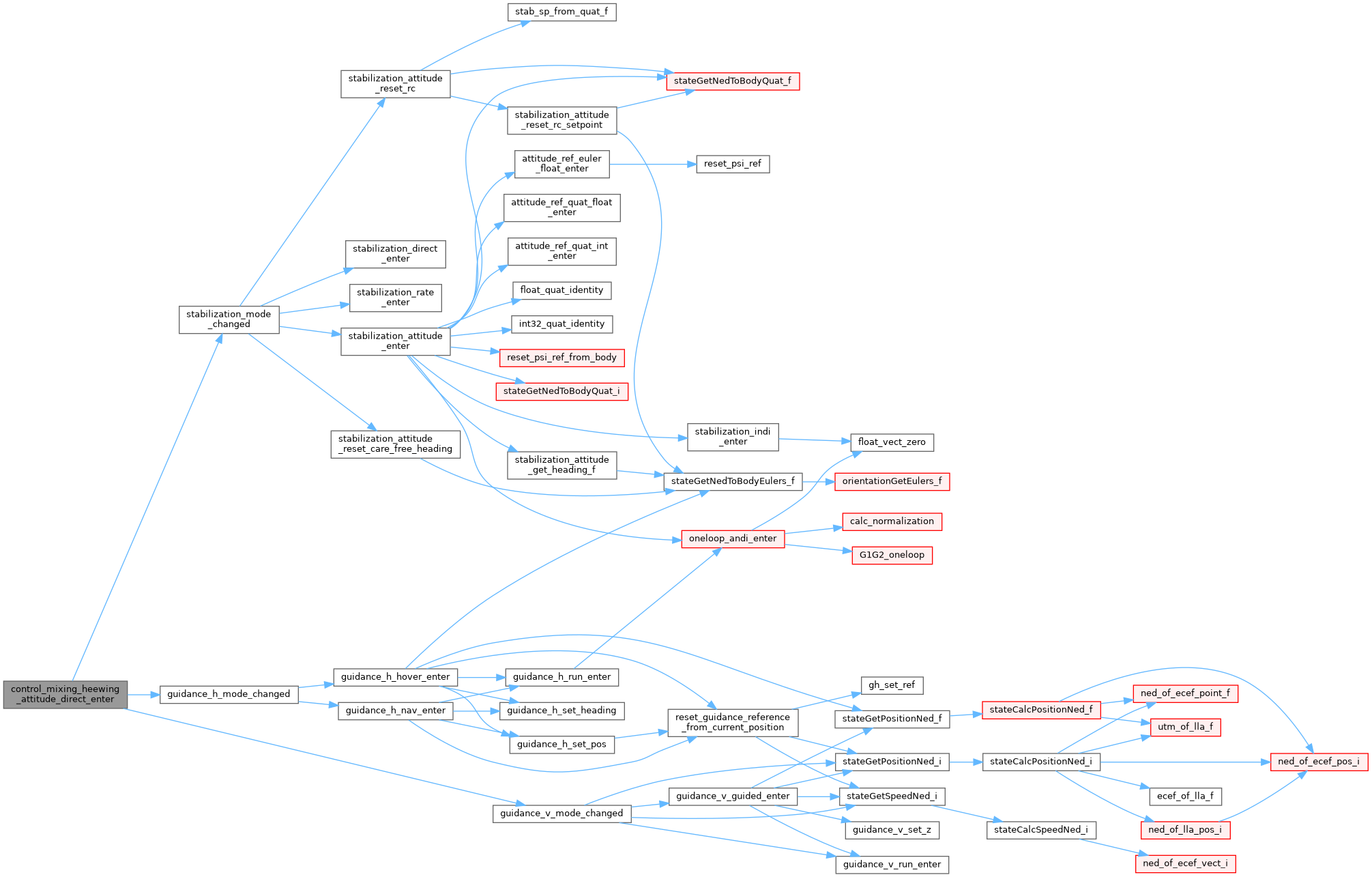
Here is the call graph for this function:Definition at line 182 of file control_mixing_heewing.c.
References actuators_pprz, autopilot, autopilot_in_flight(), Stabilization::cmd, CMH_ACT_MOTOR_LEFT, CMH_ACT_MOTOR_RIGHT, CMH_ACT_MOTOR_TAIL, CMH_TILT_FORWARD, CMH_TILT_VERTICAL, command_from_transition(), commands, foo, guidance_v_run(), MAX_PPRZ, FloatEulers::phi, radio_control_get(), RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, Stabilization::rc_sp, stab_sp_from_eulers_f(), stabilization, stabilization_attitude_plane_pid_run(), stabilization_run(), th_sp_from_thrust_i(), pprz_autopilot::throttle, THRUST_AXIS_X, transition_ratio, transition_run(), and TRANSITION_TO_FORWARD.
Here is the call graph for this function:Definition at line 173 of file control_mixing_heewing.c.
References guidance_h_mode_changed(), GUIDANCE_H_MODE_NONE, guidance_v_mode_changed(), GUIDANCE_V_MODE_RC_DIRECT, STABILIZATION_ATT_SUBMODE_HEADING, stabilization_attitude_plane_pid_enter(), STABILIZATION_MODE_ATTITUDE, and stabilization_mode_changed().
Here is the call graph for this function:Definition at line 98 of file control_mixing_heewing.c.
References transition_ratio.
Direct manual control in plane style flight.
Definition at line 103 of file control_mixing_heewing.c.
References autopilot, CMH_TILT_FORWARD, commands, foo, MIN_PPRZ, radio_control_get(), RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, pprz_autopilot::throttle, transition_run(), and TRANSITION_TO_FORWARD.
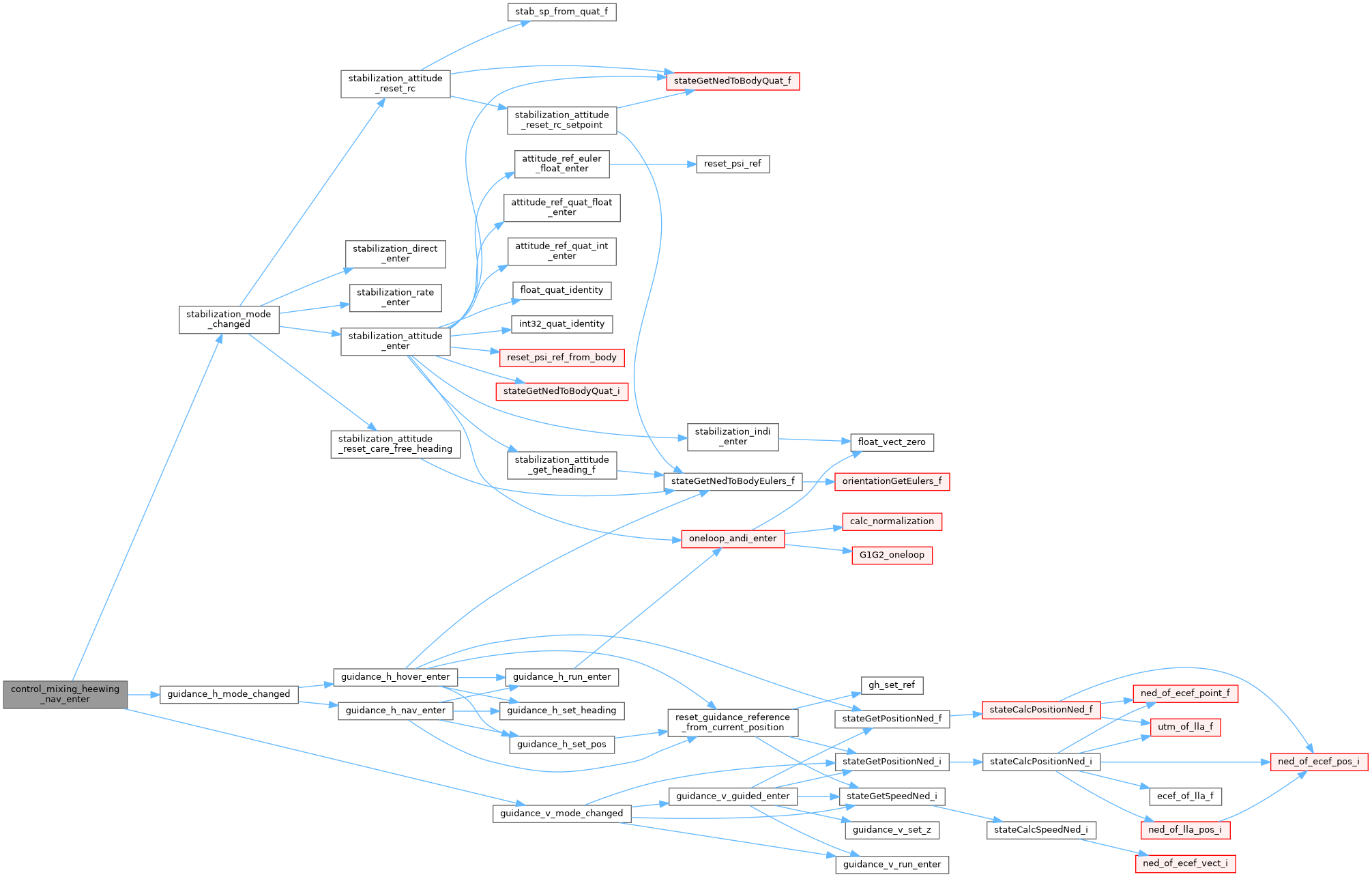
Here is the call graph for this function:Definition at line 225 of file control_mixing_heewing.c.
References guidance_h_mode_changed(), GUIDANCE_H_MODE_NAV, guidance_v_mode_changed(), GUIDANCE_V_MODE_NAV, STABILIZATION_ATT_SUBMODE_HEADING, STABILIZATION_MODE_ATTITUDE, and stabilization_mode_changed().
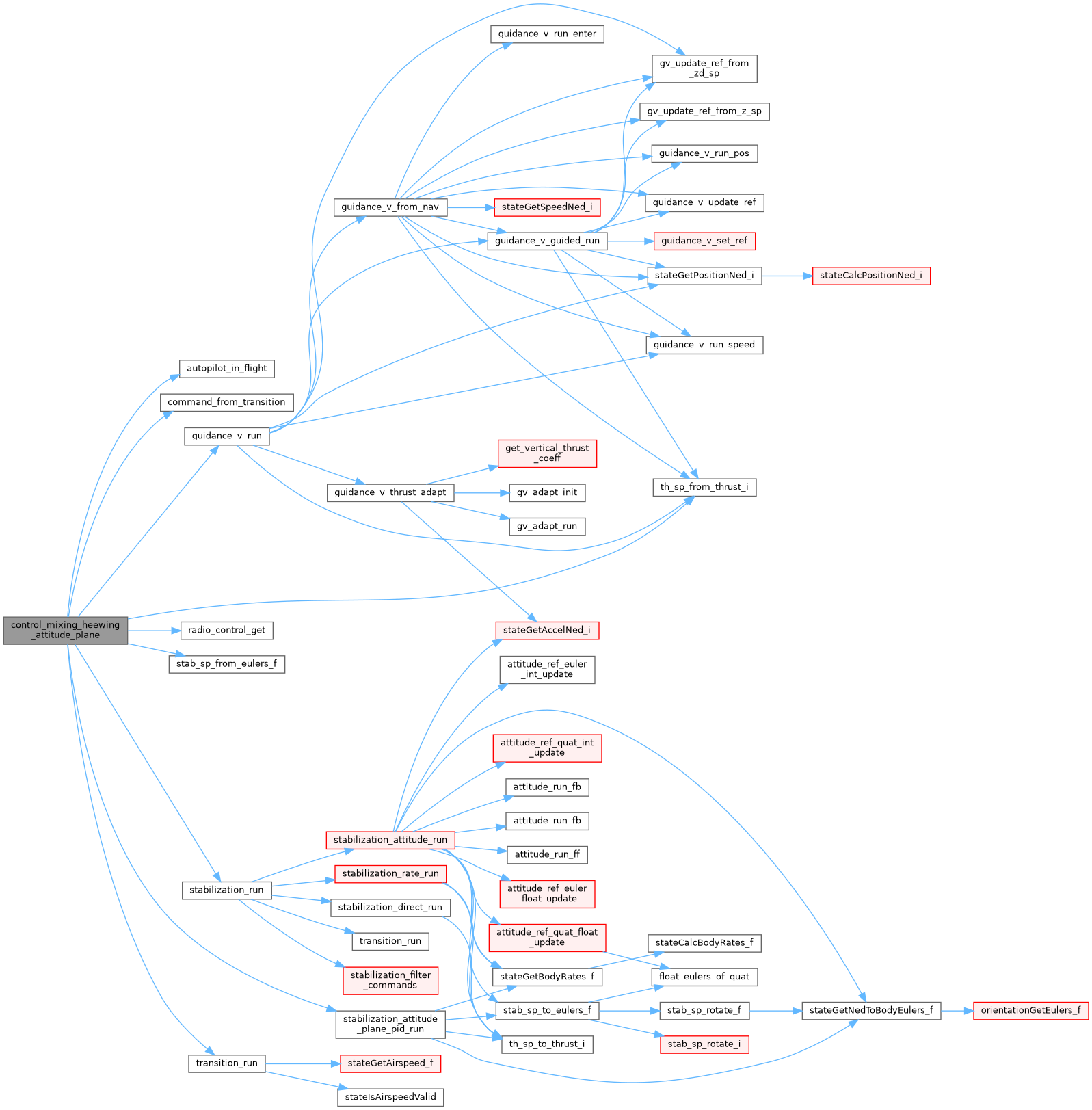
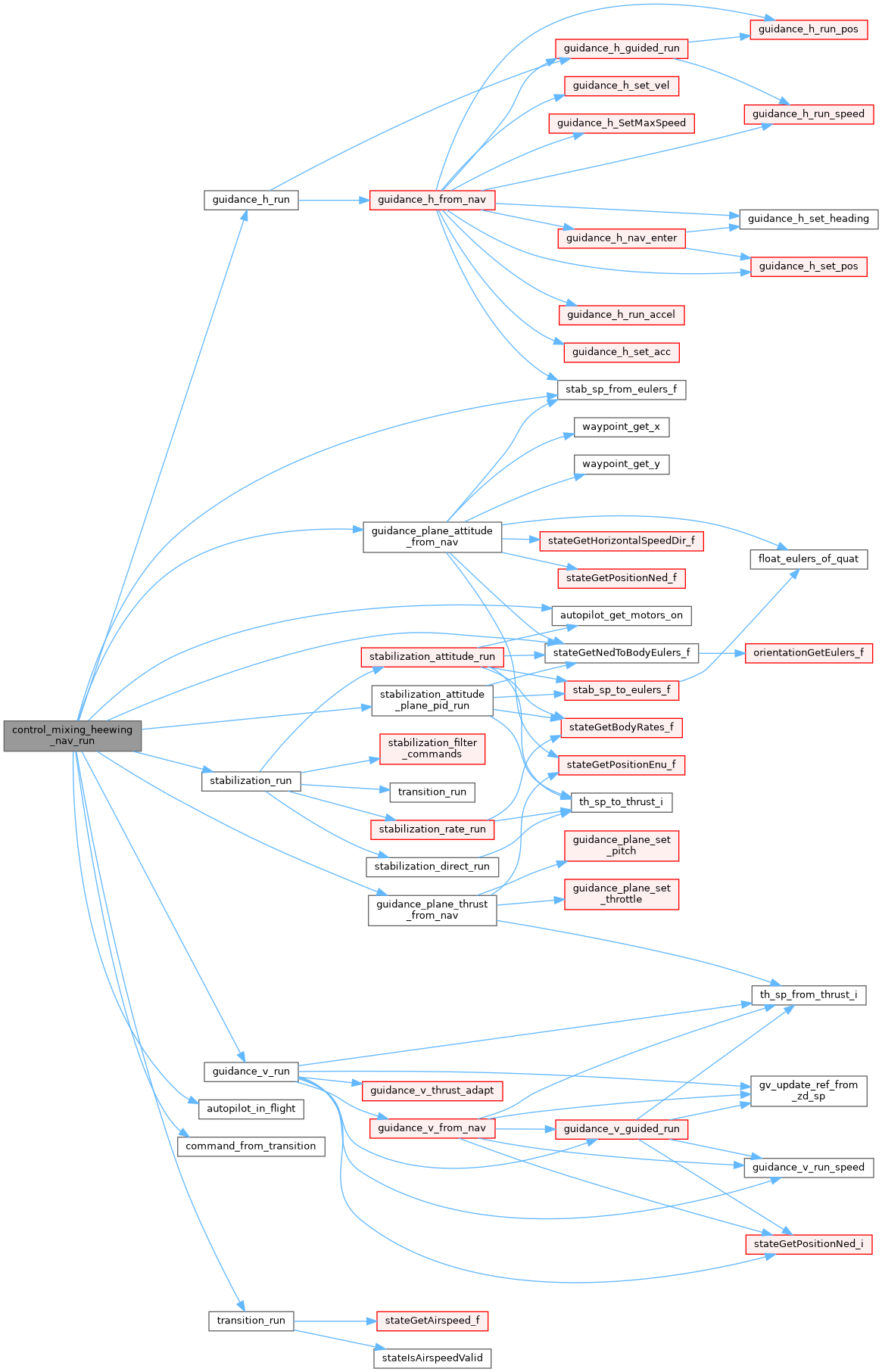
Here is the call graph for this function:Definition at line 232 of file control_mixing_heewing.c.
References actuators_pprz, autopilot, autopilot_get_motors_on(), autopilot_in_flight(), Stabilization::cmd, CMH_ACT_MOTOR_LEFT, CMH_ACT_MOTOR_RIGHT, CMH_ACT_MOTOR_TAIL, CMH_ACT_YAW, CMH_TILT_FORWARD, CMH_TILT_VERTICAL, command_from_transition(), commands, foo, guidance_h_run(), guidance_plane, guidance_plane_attitude_from_nav(), guidance_plane_thrust_from_nav(), guidance_v_run(), RotorcraftNavigation::heading, RotorcraftNavigation::horizontal_mode, MAX_PPRZ, MIN_PPRZ, nav, NAV_HORIZONTAL_MODE_CIRCLE, NAV_HORIZONTAL_MODE_ROUTE, FloatEulers::phi, GuidancePlane::pitch_cmd, FloatEulers::psi, stab_sp_from_eulers_f(), stabilization, stabilization_attitude_plane_pid_run(), stabilization_run(), stateGetNedToBodyEulers_f(), pprz_autopilot::throttle, transition_ratio, transition_run(), TRANSITION_TO_FORWARD, and TRANSITION_TO_HOVER.
Here is the call graph for this function: