|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
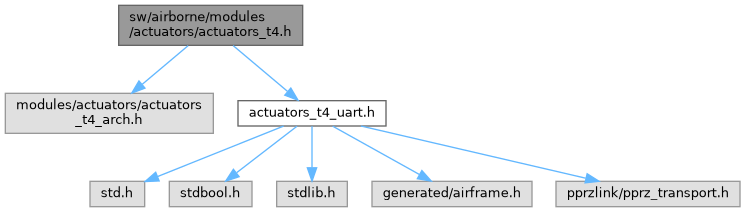
Uses a T4 Actuators Board as fly by wire system. This Board can control serial bus servos, ESC's and PWM servos, with as big benefir providing real time telemetry in return into the autopilot state. Read more on how to create your own T4 Board here: https://github.com/tudelft/t4_actuators_board/. More...
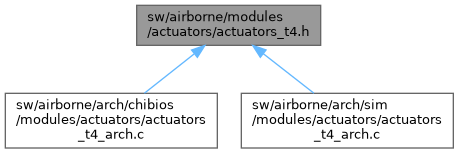
 Include dependency graph for actuators_t4.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators_t4.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | ActuatorsT4Init() actuators_t4_arch_init() |
Functions | |
| void | actuators_t4_arch_init (void) |
| Arch dependent init file. | |
Uses a T4 Actuators Board as fly by wire system. This Board can control serial bus servos, ESC's and PWM servos, with as big benefir providing real time telemetry in return into the autopilot state. Read more on how to create your own T4 Board here: https://github.com/tudelft/t4_actuators_board/.
Definition in file actuators_t4.h.
| #define ActuatorsT4Init | ( | ) | actuators_t4_arch_init() |
Definition at line 38 of file actuators_t4.h.
Arch dependent init file.
implemented in arch files
Definition at line 54 of file actuators_t4_arch.c.
References actuators_t4_extra_data_out_local, ACTUATORS_T4_NUM_MAX_ESCS, ACTUATORS_T4_NUM_MAX_SERVOS, actuators_t4_out_local, ACTUATORS_T4_REFRESH_FREQUENCY, ActuatorsT4Out::esc_arm, and ActuatorsT4Out::servo_arm.