|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
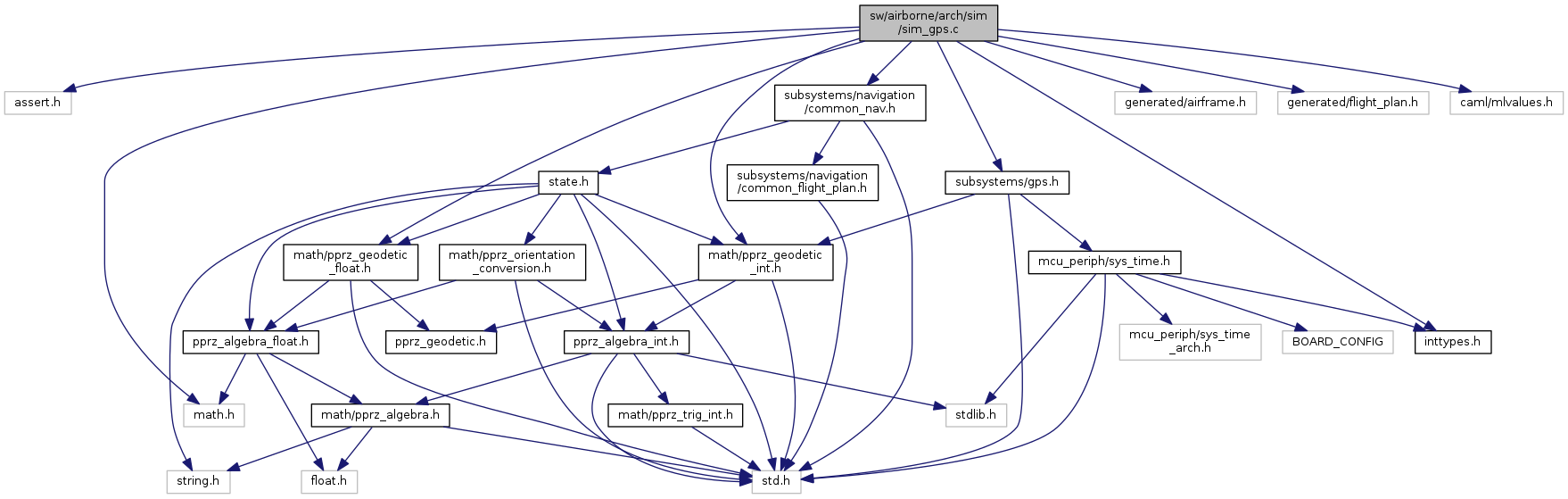
#include <assert.h>#include <math.h>#include <inttypes.h>#include "generated/airframe.h"#include "generated/flight_plan.h"#include "subsystems/gps.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_geodetic_int.h"#include "subsystems/navigation/common_nav.h"#include <caml/mlvalues.h> Include dependency graph for sim_gps.c:
Include dependency graph for sim_gps.c:Go to the source code of this file.
Functions | |
| value | sim_use_gps_pos (value x, value y, value z, value c, value a, value s, value cl, value t, value m, value lat, value lon) |
| From airborne/autopilot/. More... | |
| value | sim_use_gps_pos_bytecode (value *a, int argn) |
| void | ubxsend_cfg_rst (uint16_t a, uint8_t b) |
| value sim_use_gps_pos | ( | value | x, |
| value | y, | ||
| value | z, | ||
| value | c, | ||
| value | a, | ||
| value | s, | ||
| value | cl, | ||
| value | t, | ||
| value | m, | ||
| value | lat, | ||
| value | lon | ||
| ) |
From airborne/autopilot/.
Space vehicle info simulation
Definition at line 20 of file sim_gps.c.
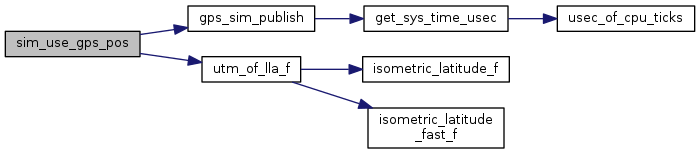
References LlaCoor_f::alt, SVinfo::azim, SVinfo::cno, GpsState::course, UtmCoor_f::east, UtmCoor_i::east, SVinfo::elev, GpsState::fix, SVinfo::flags, gps, gps_sim_publish(), GpsState::gspeed, GpsState::hmsl, LlaCoor_f::lat, LLA_BFP_OF_REAL, GpsState::lla_pos, LlaCoor_f::lon, nav_utm_zone0, GpsState::nb_channels, GpsState::ned_vel, UtmCoor_f::north, UtmCoor_i::north, GpsState::num_sv, GpsState::pacc, GpsState::pdop, SVinfo::qi, GpsState::sacc, SVinfo::svid, GpsState::svinfos, GpsState::tow, utm_of_lla_f(), GpsState::utm_pos, GpsState::week, NedCoor_i::x, NedCoor_i::y, NedCoor_i::z, UtmCoor_f::zone, and UtmCoor_i::zone.
Referenced by sim_use_gps_pos_bytecode().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 83 of file sim_gps.c.
References sim_use_gps_pos().
Here is the call graph for this function: 1.8.8
1.8.8