|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
#include <stdio.h>#include <assert.h>#include <sys/time.h>#include <sys/stat.h>#include <time.h>#include <string.h>#include "std.h"#include "inter_mcu.h"#include "autopilot.h"#include "subsystems/gps.h"#include "subsystems/navigation/traffic_info.h"#include "generated/settings.h"#include "firmwares/fixedwing/nav.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include "firmwares/fixedwing/guidance/guidance_v.h"#include "subsystems/commands.h"#include "firmwares/fixedwing/main_ap.h"#include "subsystems/datalink/datalink.h"#include "subsystems/datalink/telemetry.h"#include "generated/flight_plan.h"#include "generated/modules.h"#include <caml/mlvalues.h>#include <caml/memory.h> Include dependency graph for sim_ap.c:
Include dependency graph for sim_ap.c:Go to the source code of this file.
Macros | |
| #define | MODULES_C |
Functions | |
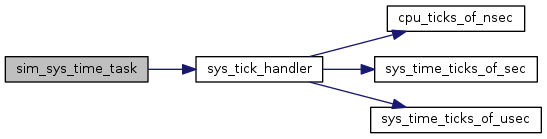
| value | sim_sys_time_task (value unit) |
| needs to be called at SYS_TIME_FREQUENCY More... | |
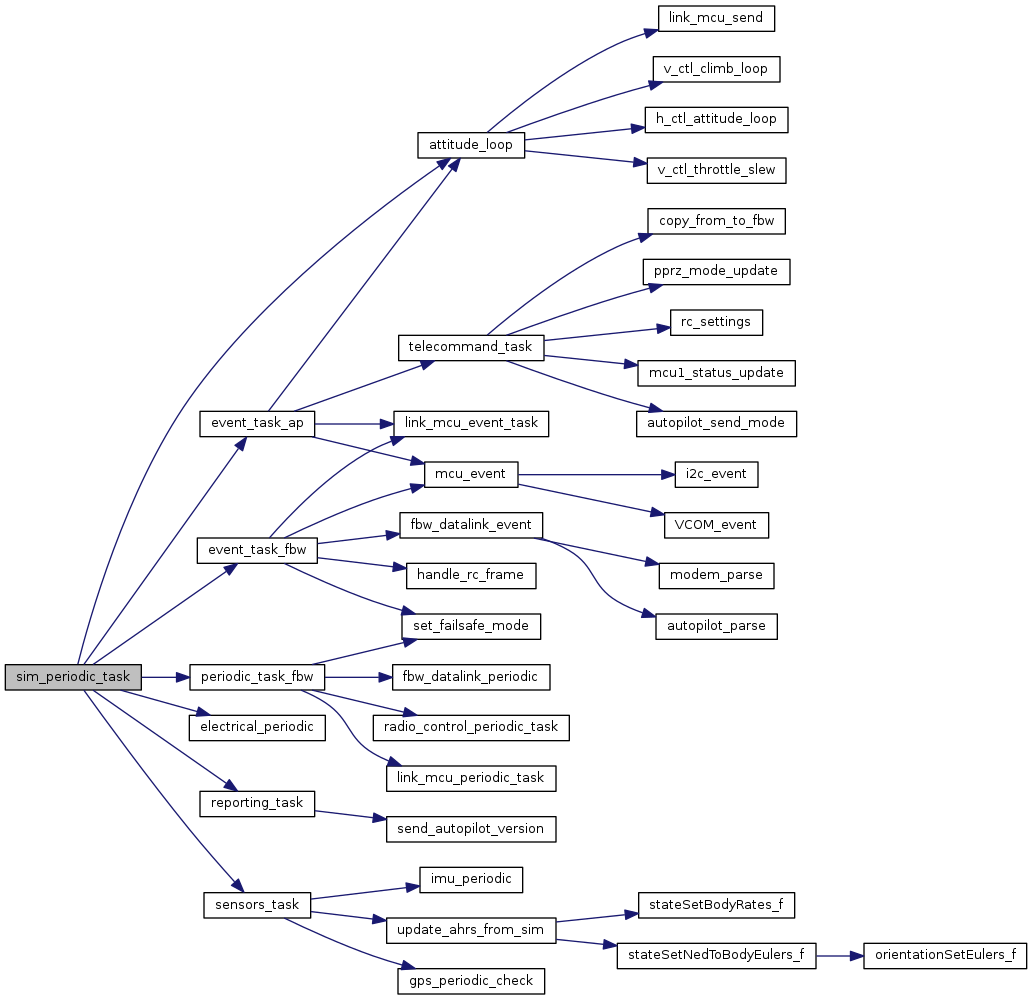
| value | sim_periodic_task (value unit) |
| value | sim_monitor_task (value unit) |
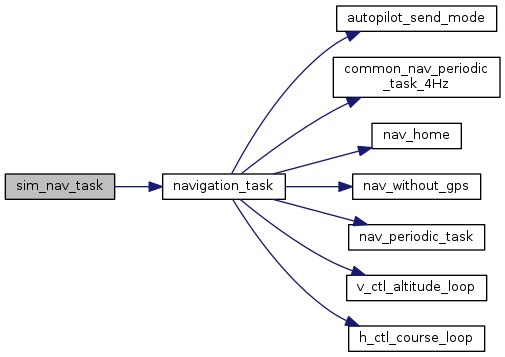
| value | sim_nav_task (value unit) |
| float | ftimeofday (void) |
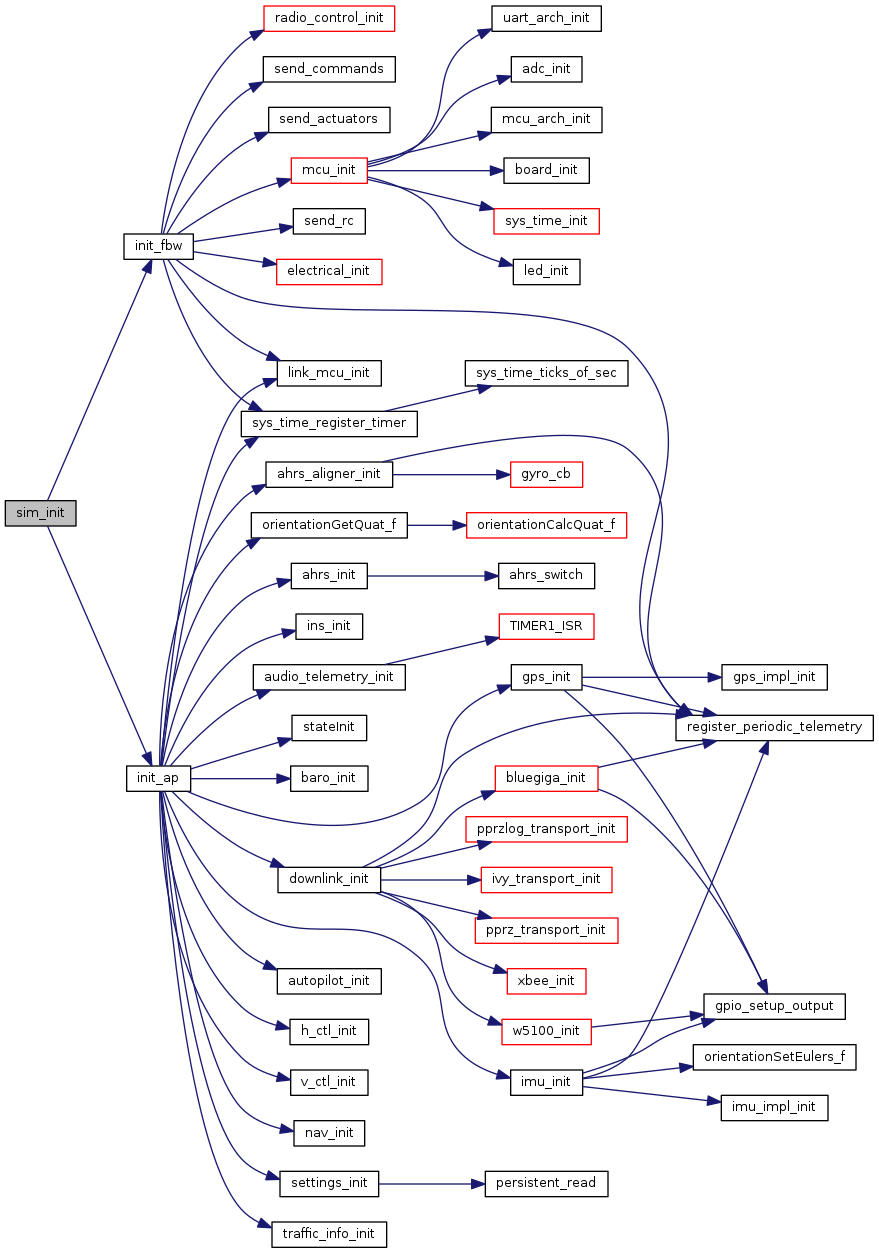
| value | sim_init (value unit) |
| value | update_bat (value bat) |
| value | update_dl_status (value dl_enabled) |
| value | get_commands (value val_commands) |
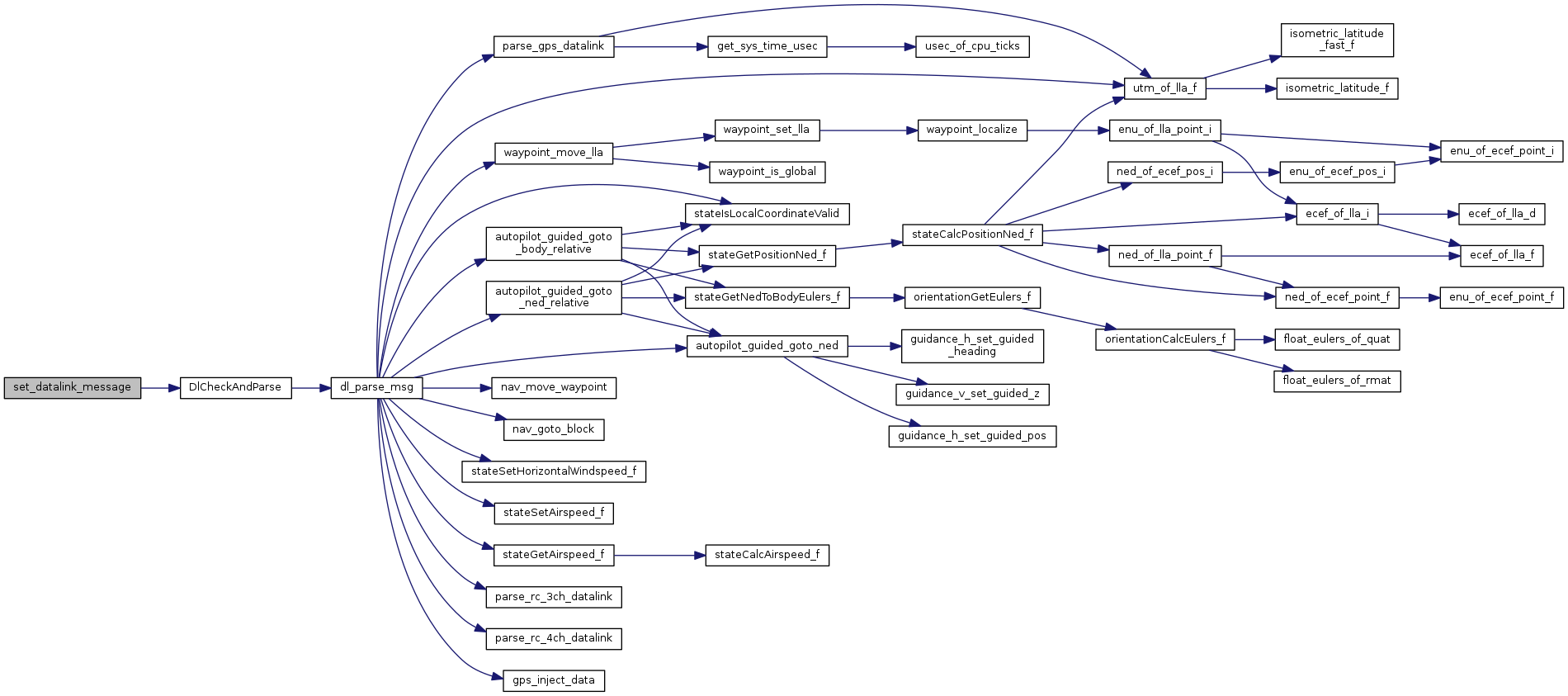
| value | set_datalink_message (value s) |
| void | adc_buf_channel (void *a, void *b, void *c) |
| Required by electrical. More... | |
Variables | |
| uint8_t | ir_estim_mode |
| uint8_t | vertical_mode |
| uint8_t | inflight_calib_mode |
| bool_t | rc_event_1 |
| bool_t | rc_event_2 |
| bool_t | launch |
| uint8_t | gps_nb_ovrn |
| uint8_t | link_fbw_fbw_nb_err |
| uint8_t | link_fbw_nb_err |
| float | alt_roll_pgain |
| float | roll_rate_pgain |
| uint16_t | datalink_time = 0 |
| uint16_t | datalink_nb_msgs = 0 |
| uint8_t | ac_id |
| void adc_buf_channel | ( | void * | a, |
| void * | b, | ||
| void * | c | ||
| ) |
Definition at line 130 of file sim_ap.c.
References dl_buffer, dl_msg_available, DlCheckAndParse(), MSG_SIZE, and TRUE.
Here is the call graph for this function:Definition at line 98 of file sim_ap.c.
References init_ap(), init_fbw(), and unit.
Here is the call graph for this function:Definition at line 77 of file sim_ap.c.
References monitor_task(), and unit.
Here is the call graph for this function:Definition at line 83 of file sim_ap.c.
References navigation_task(), and unit.
Here is the call graph for this function:Definition at line 64 of file sim_ap.c.
References attitude_loop(), electrical_periodic(), event_task_ap(), event_task_fbw(), periodic_task_fbw(), reporting_task(), sensors_task(), and unit.
Here is the call graph for this function:needs to be called at SYS_TIME_FREQUENCY
Definition at line 58 of file sim_ap.c.
References sys_tick_handler(), and unit.
Here is the call graph for this function:Definition at line 106 of file sim_ap.c.
References electrical, and Electrical::vsupply.
Definition at line 112 of file sim_ap.c.
References ivy_transport::ivy_dl_enabled, and ivy_tp.
| uint8_t ac_id |
Definition at line 47 of file sim_ap.c.
Referenced by dl_parse_msg(), formation_flight(), potential_task(), start_formation(), stop_formation(), tcas_periodic_task_1Hz(), trigger_ext_periodic(), and windturbine_periodic().
| uint16_t datalink_nb_msgs = 0 |
Definition at line 44 of file sim_ap.c.
Referenced by downlink_init().
| uint16_t datalink_time = 0 |
Definition at line 43 of file sim_ap.c.
Referenced by main_periodic(), monitor_task(), and xtend_rssi_periodic().
| uint8_t gps_nb_ovrn |
Definition at line 40 of file sim_ap.c.
Referenced by dl_parse_msg().
| bool_t launch |
Definition at line 39 of file sim_ap.c.
Referenced by attitude_loop(), Drift_correction(), h_ctl_course_loop(), h_ctl_pitch_loop(), h_ctl_roll_loop(), monitor_task(), nav_catapult_highrate_module(), navigation_task(), takeoff_detect_periodic(), telecommand_task(), v_ctl_climb_loop(), v_ctl_set_pitch(), and v_ctl_set_throttle().
| uint8_t vertical_mode |
Definition at line 36 of file sim_ap.c.
Referenced by guidance_v_run().
 1.8.8
1.8.8