|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Implementation independant radio control handing. More...
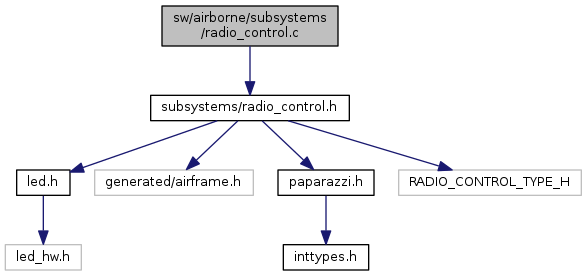
#include "subsystems/radio_control.h" Include dependency graph for radio_control.c:
Include dependency graph for radio_control.c:Go to the source code of this file.
Functions | |
| void | radio_control_init (void) |
| void | radio_control_periodic_task (void) |
Variables | |
| struct RadioControl | radio_control |
Implementation independant radio control handing.
Definition in file radio_control.c.
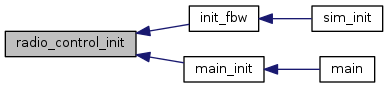
| void radio_control_init | ( | void | ) |
Definition at line 32 of file radio_control.c.
References RadioControl::frame_cpt, RadioControl::frame_rate, radio_control, radio_control_impl_init(), RADIO_CONTROL_NB_CHANNEL, RadioControl::radio_ok_cpt, RC_REALLY_LOST, RC_REALLY_LOST_TIME, RadioControl::status, RadioControl::time_since_last_frame, and RadioControl::values.
Referenced by init_fbw(), and main_init().
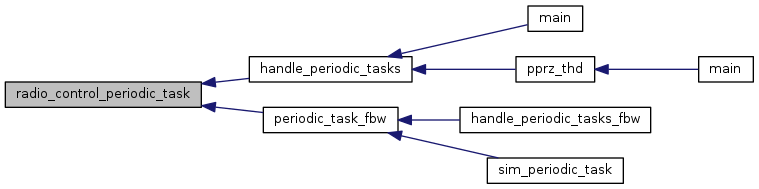
Here is the call graph for this function: Here is the caller graph for this function:| void radio_control_periodic_task | ( | void | ) |
Definition at line 46 of file radio_control.c.
References RadioControl::frame_cpt, RadioControl::frame_rate, LED_OFF, LED_ON, radio_control, RadioControl::radio_ok_cpt, RC_LOST, RC_LOST_TIME, RC_OK, RC_OK_CPT, RC_REALLY_LOST, RC_REALLY_LOST_TIME, RadioControl::status, and RadioControl::time_since_last_frame.
Referenced by handle_periodic_tasks(), and periodic_task_fbw().
Here is the caller graph for this function:| struct RadioControl radio_control |
Definition at line 30 of file radio_control.c.
Referenced by ap_mode_of_3way_switch(), autopilot_on_rc_frame(), failsafe_check(), get_rc_pitch(), get_rc_pitch_f(), get_rc_roll(), get_rc_roll_f(), get_rc_yaw(), get_rc_yaw_f(), guidance_h_module_read_rc(), guidance_h_read_rc(), guidance_v_read_rc(), guidance_v_run(), handle_rc_frame(), intermcu_on_rc_frame(), intermcu_parse_msg(), main_periodic(), percent_from_rc(), periodic_task_fbw(), radio_control_impl_event(), radio_control_init(), radio_control_periodic_task(), RadioControlEventImp(), read_rc_setpoint_speed_i(), sdlogger_spi_direct_periodic(), send_rc(), send_rotorcraft_rc(), send_status(), stabilization_none_read_rc(), stabilization_rate_read_rc(), stabilization_rate_read_rc_switched_sticks(), and update_rc_channel().
 1.8.8
1.8.8