|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
driver for the optical flow sensor PX4FLOW More...
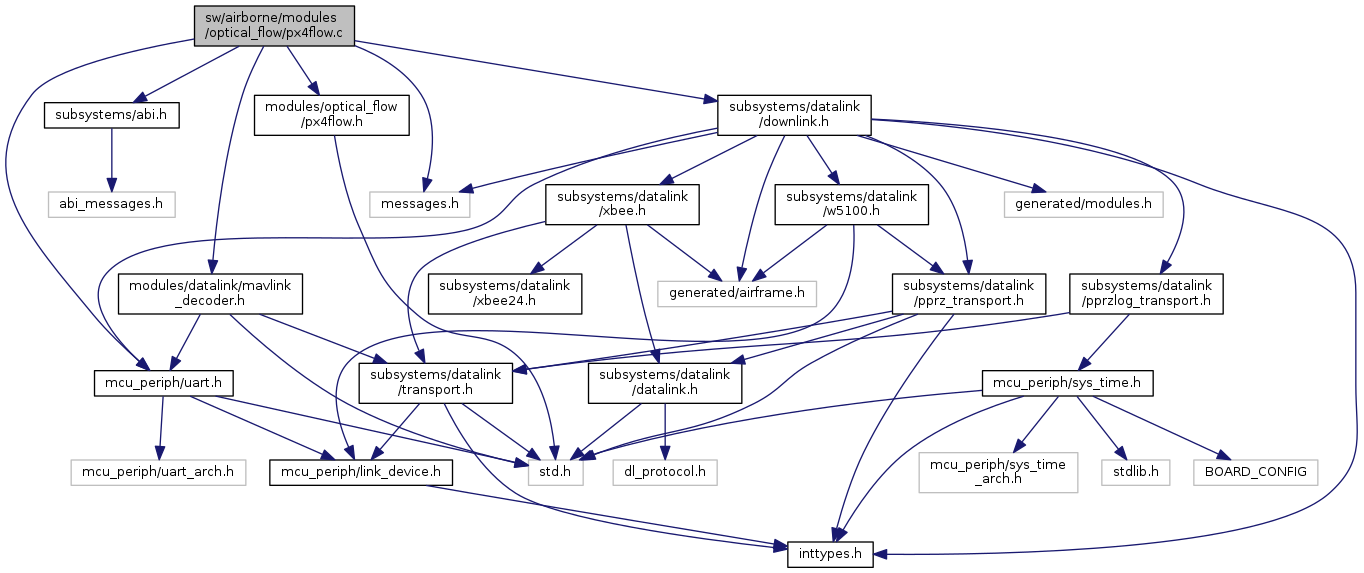
#include "modules/optical_flow/px4flow.h"#include "modules/datalink/mavlink_decoder.h"#include "subsystems/abi.h"#include "mcu_periph/uart.h"#include "messages.h"#include "subsystems/datalink/downlink.h" Include dependency graph for px4flow.c:
Include dependency graph for px4flow.c:Go to the source code of this file.
Macros | |
| #define | MAVLINK_OPTICAL_FLOW_MSG_ID 100 |
| #define | MAVLINK_OPTICAL_FLOW_LEN 26 |
| #define | PX4FLOW_NOISE 0.5 |
Functions | |
| static void | decode_optical_flow_msg (struct mavlink_message *msg) |
| void | px4flow_init (void) |
| Initialization function. More... | |
| void | px4flow_downlink (void) |
| Downlink message for debug. More... | |
Variables | |
| struct mavlink_optical_flow | optical_flow |
| bool_t | optical_flow_available |
| struct mavlink_msg_req | req |
driver for the optical flow sensor PX4FLOW
Sensor from the PIXHAWK project
Definition in file px4flow.c.
| #define MAVLINK_OPTICAL_FLOW_MSG_ID 100 |
Definition at line 37 of file px4flow.c.
Referenced by px4flow_init().
| #define PX4FLOW_NOISE 0.5 |
Definition at line 42 of file px4flow.c.
Referenced by decode_optical_flow_msg().
|
static |
Definition at line 50 of file px4flow.c.
References mavlink_optical_flow::flow_x, mavlink_optical_flow::flow_y, mavlink_optical_flow::ground_distance, optical_flow, optical_flow_available, PX4FLOW_NOISE, PX4FLOW_VELOCITY_ID, and TRUE.
Referenced by px4flow_init().
Here is the caller graph for this function:| void px4flow_downlink | ( | void | ) |
Downlink message for debug.
Definition at line 83 of file px4flow.c.
References DefaultChannel, DefaultDevice, mavlink_optical_flow::flow_comp_m_x, mavlink_optical_flow::flow_comp_m_y, mavlink_optical_flow::flow_x, mavlink_optical_flow::flow_y, mavlink_optical_flow::ground_distance, optical_flow, mavlink_optical_flow::quality, and mavlink_optical_flow::sensor_id.
| void px4flow_init | ( | void | ) |
Initialization function.
Definition at line 64 of file px4flow.c.
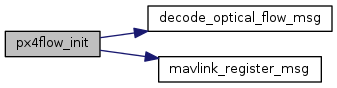
References mavlink_msg_req::callback, decode_optical_flow_msg(), FALSE, MAVLINK_OPTICAL_FLOW_MSG_ID, mavlink_register_msg(), mavlink_tp, mavlink_msg_req::msg, mavlink_msg_req::msg_id, optical_flow, optical_flow_available, mavlink_message::payload, and req.
Here is the call graph for this function:| struct mavlink_optical_flow optical_flow |
Definition at line 33 of file px4flow.c.
Referenced by decode_optical_flow_msg(), px4flow_downlink(), and px4flow_init().
| bool_t optical_flow_available |
Definition at line 34 of file px4flow.c.
Referenced by decode_optical_flow_msg(), and px4flow_init().
| struct mavlink_msg_req req |
Definition at line 46 of file px4flow.c.
Referenced by mavlink_register_msg(), mavlink_wp_message_handler(), and px4flow_init().
 1.8.8
1.8.8