|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Attitude representations:
Collaboration diagram for Attitude representations:Functions | |
| static bool_t | stateIsAttitudeValid (void) |
| Test if attitudes are valid. More... | |
| static void | stateSetNedToBodyQuat_i (struct Int32Quat *ned_to_body_quat) |
| Set vehicle body attitude from quaternion (int). More... | |
| static void | stateSetNedToBodyRMat_i (struct Int32RMat *ned_to_body_rmat) |
| Set vehicle body attitude from rotation matrix (int). More... | |
| static void | stateSetNedToBodyEulers_i (struct Int32Eulers *ned_to_body_eulers) |
| Set vehicle body attitude from euler angles (int). More... | |
| static void | stateSetNedToBodyQuat_f (struct FloatQuat *ned_to_body_quat) |
| Set vehicle body attitude from quaternion (float). More... | |
| static void | stateSetNedToBodyRMat_f (struct FloatRMat *ned_to_body_rmat) |
| Set vehicle body attitude from rotation matrix (float). More... | |
| static void | stateSetNedToBodyEulers_f (struct FloatEulers *ned_to_body_eulers) |
| Set vehicle body attitude from euler angles (float). More... | |
| static struct Int32Quat * | stateGetNedToBodyQuat_i (void) |
| Get vehicle body attitude quaternion (int). More... | |
| static struct Int32RMat * | stateGetNedToBodyRMat_i (void) |
| Get vehicle body attitude rotation matrix (int). More... | |
| static struct Int32Eulers * | stateGetNedToBodyEulers_i (void) |
| Get vehicle body attitude euler angles (int). More... | |
| static struct FloatQuat * | stateGetNedToBodyQuat_f (void) |
| Get vehicle body attitude quaternion (float). More... | |
| static struct FloatRMat * | stateGetNedToBodyRMat_f (void) |
| Get vehicle body attitude rotation matrix (float). More... | |
| static struct FloatEulers * | stateGetNedToBodyEulers_f (void) |
| Get vehicle body attitude euler angles (float). More... | |
|
static |
Get vehicle body attitude euler angles (float).
Definition at line 1114 of file state.h.
References State::ned_to_body_orientation, orientationGetEulers_f(), and state.
Referenced by autopilot_guided_goto_body_relative(), autopilot_guided_goto_ned_relative(), cam_target(), CN_calculate_target(), CN_escape_velocity(), CN_potential_heading(), CN_potential_velocity(), CN_vector_escape_velocity(), CN_vector_velocity(), dc_circle(), dc_info(), dc_periodic(), dc_send_shot_position(), guidance_indi_calcG(), guidance_indi_filter_attitude(), h_ctl_course_loop(), h_ctl_pitch_loop(), h_ctl_roll_loop(), imu_SetBodyToImuCurrent(), logger_uart_periodic(), main_periodic_task(), mavlink_send_attitude(), mavlink_send_global_position_int(), mavlink_send_vfr_hud(), mf_daq_send_state(), OA_update(), opticflow_module_run(), parse_mf_daq_msg(), send_attitude(), stabilization_attitude_get_heading_f(), stabilization_attitude_read_rc_setpoint_eulers_f(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), stabilization_attitude_reset_care_free_heading(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), stabilization_attitude_set_setpoint_rp_quat_f(), stereo_avoid_run(), stereo_to_state_periodic(), takeoff_detect_periodic(), and v_ctl_climb_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Get vehicle body attitude euler angles (int).
Definition at line 1096 of file state.h.
References State::ned_to_body_orientation, orientationGetEulers_i(), and state.
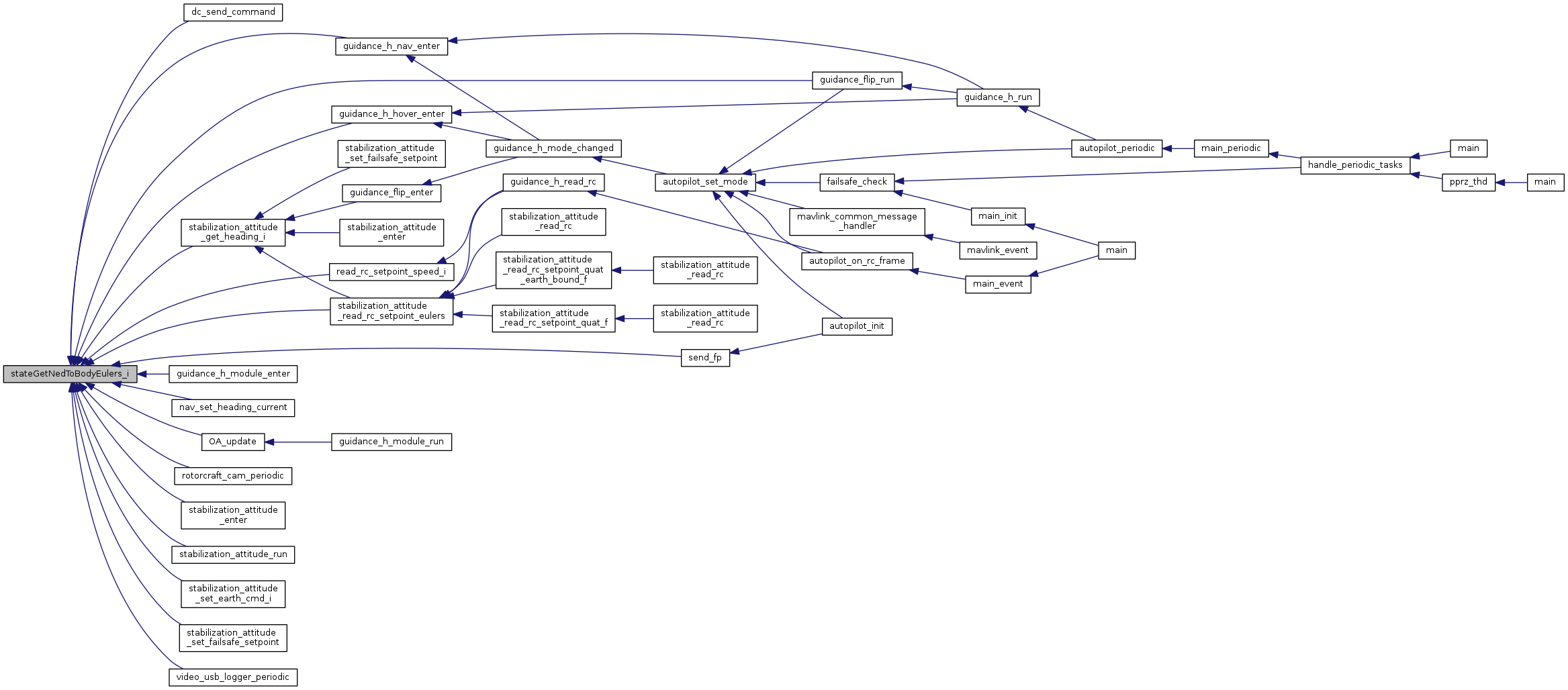
Referenced by dc_send_command(), guidance_flip_run(), guidance_h_hover_enter(), guidance_h_module_enter(), guidance_h_nav_enter(), nav_set_heading_current(), OA_update(), read_rc_setpoint_speed_i(), rotorcraft_cam_periodic(), send_fp(), stabilization_attitude_enter(), stabilization_attitude_get_heading_i(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), and video_usb_logger_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Get vehicle body attitude quaternion (float).
Definition at line 1102 of file state.h.
References State::ned_to_body_orientation, orientationGetQuat_f(), and state.
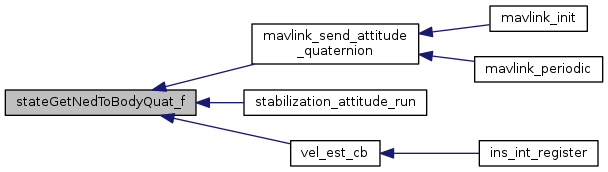
Referenced by mavlink_send_attitude_quaternion(), stabilization_attitude_run(), and vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Get vehicle body attitude quaternion (int).
Definition at line 1084 of file state.h.
References State::ned_to_body_orientation, orientationGetQuat_i(), and state.
Referenced by file_logger_periodic(), ins_int_update_gps(), and stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Get vehicle body attitude rotation matrix (float).
Definition at line 1108 of file state.h.
References State::ned_to_body_orientation, orientationGetRMat_f(), and state.
Referenced by stereocam_to_state().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Get vehicle body attitude rotation matrix (int).
Definition at line 1090 of file state.h.
References State::ned_to_body_orientation, orientationGetRMat_i(), and state.
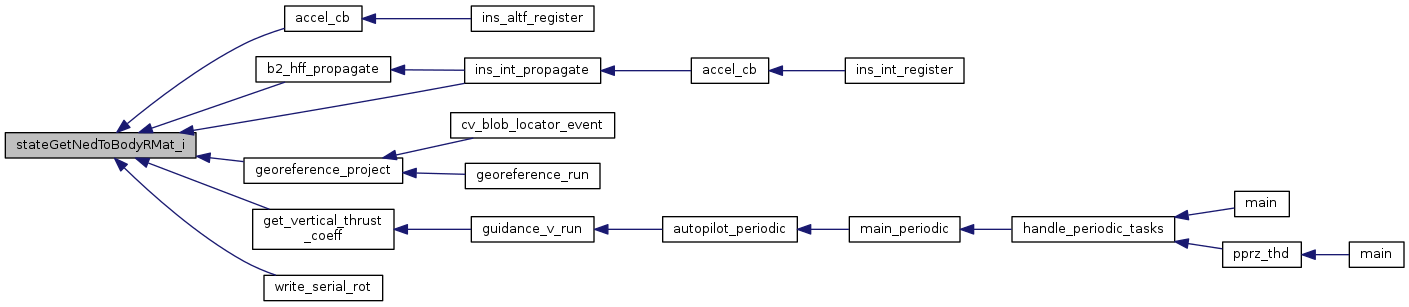
Referenced by accel_cb(), b2_hff_propagate(), georeference_project(), get_vertical_thrust_coeff(), ins_int_propagate(), and write_serial_rot().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Test if attitudes are valid.
Definition at line 1038 of file state.h.
References State::ned_to_body_orientation, orienationCheckValid(), and state.
Referenced by ahrs_is_aligned(), imu_SetBodyToImuCurrent(), and mavlink_send_heartbeat().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Set vehicle body attitude from euler angles (float).
Definition at line 1076 of file state.h.
References State::ned_to_body_orientation, orientationSetEulers_f(), and state.
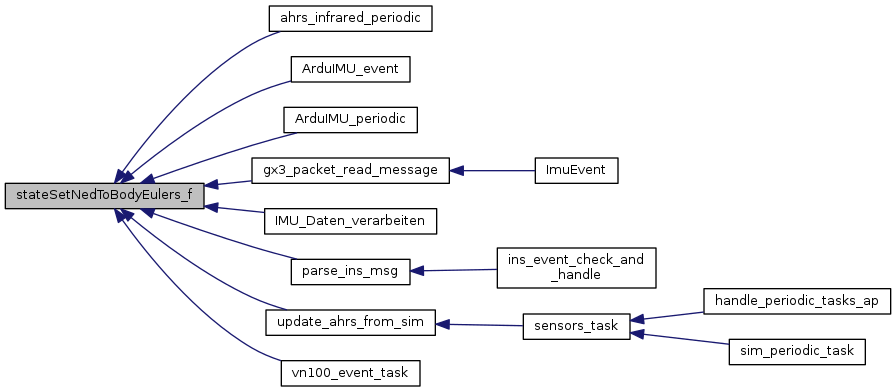
Referenced by ahrs_infrared_periodic(), ArduIMU_event(), ArduIMU_periodic(), gx3_packet_read_message(), IMU_Daten_verarbeiten(), parse_ins_msg(), update_ahrs_from_sim(), and vn100_event_task().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Set vehicle body attitude from euler angles (int).
Definition at line 1058 of file state.h.
References State::ned_to_body_orientation, orientationSetEulers_i(), and state.
Here is the call graph for this function:
|
inlinestatic |
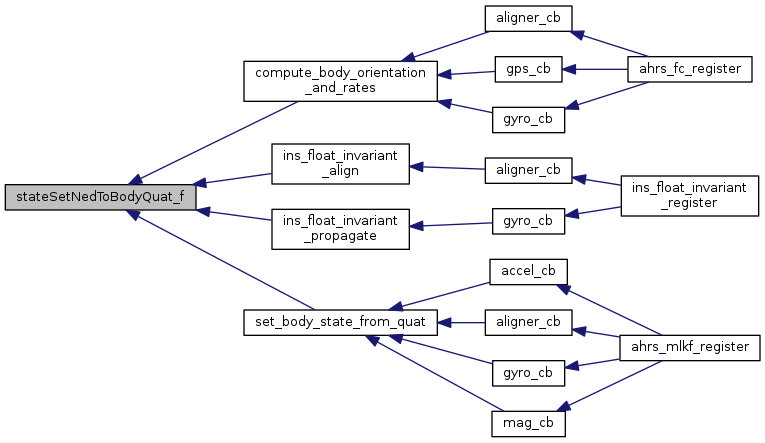
Set vehicle body attitude from quaternion (float).
Definition at line 1064 of file state.h.
References State::ned_to_body_orientation, orientationSetQuat_f(), and state.
Referenced by compute_body_orientation_and_rates(), ins_float_invariant_align(), ins_float_invariant_propagate(), and set_body_state_from_quat().
Here is the call graph for this function: Here is the caller graph for this function:
|
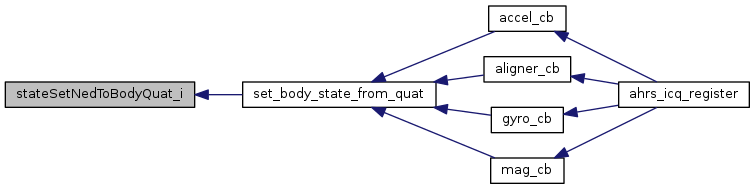
inlinestatic |
Set vehicle body attitude from quaternion (int).
Definition at line 1046 of file state.h.
References State::ned_to_body_orientation, orientationSetQuat_i(), and state.
Referenced by set_body_state_from_quat().
Here is the call graph for this function: Here is the caller graph for this function:
|
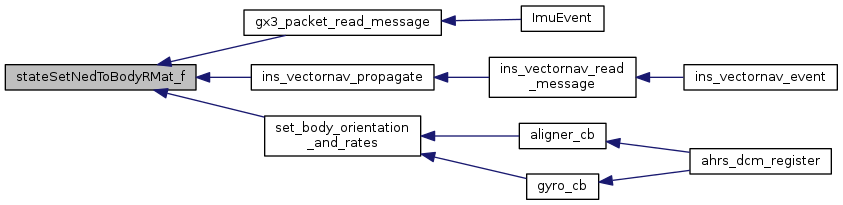
inlinestatic |
Set vehicle body attitude from rotation matrix (float).
Definition at line 1070 of file state.h.
References State::ned_to_body_orientation, orientationSetRMat_f(), and state.
Referenced by gx3_packet_read_message(), ins_vectornav_propagate(), and set_body_orientation_and_rates().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Set vehicle body attitude from rotation matrix (int).
Definition at line 1052 of file state.h.
References State::ned_to_body_orientation, orientationSetRMat_i(), and state.
Referenced by set_body_state_from_euler().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8