|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
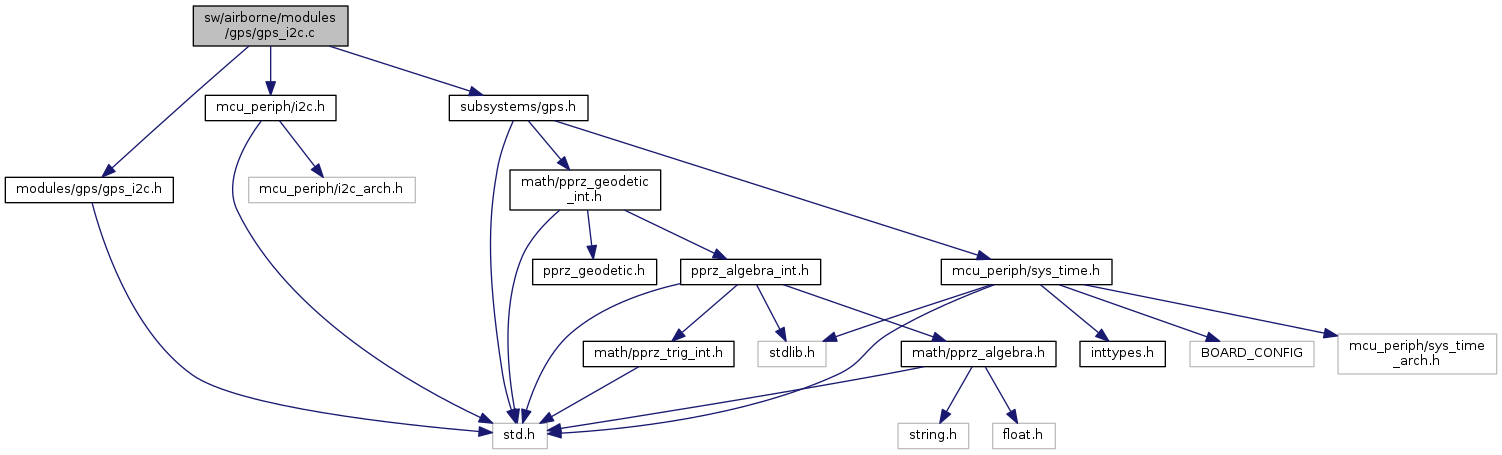
 Include dependency graph for gps_i2c.c:
Include dependency graph for gps_i2c.c:Go to the source code of this file.
Macros | |
| #define | GPS_I2C_ADDR_NB_AVAIL_BYTES 0xFD |
| #define | GPS_I2C_ADDR_DATA 0xFF |
| #define | GPS_I2C_STATUS_IDLE 0 |
| #define | GPS_I2C_STATUS_ASKING_DATA 1 |
| #define | GPS_I2C_STATUS_ASKING_NB_AVAIL_BYTES 2 |
| #define | GPS_I2C_STATUS_READING_NB_AVAIL_BYTES 3 |
| #define | GPS_I2C_STATUS_READING_DATA 4 |
| #define | gps_i2c_AddCharToRxBuf(_x) |
Functions | |
| void | gps_i2c_init (void) |
| void | gps_i2c_periodic (void) |
| void | gps_i2c_event (void) |
| #define gps_i2c_AddCharToRxBuf | ( | _x | ) |
| #define GPS_I2C_STATUS_IDLE 0 |
Definition at line 40 of file gps_i2c.c.
Referenced by gps_i2c_init().
| void gps_i2c_init | ( | void | ) |
Definition at line 55 of file gps_i2c.c.
References FALSE, gps_i2c_data_ready_to_transmit, gps_i2c_done, gps_i2c_rx_extract_idx, gps_i2c_rx_insert_idx, gps_i2c_status, GPS_I2C_STATUS_IDLE, gps_i2c_tx_insert_idx, and TRUE.
| bool_t gps_i2c_data_ready_to_transmit |
Definition at line 34 of file gps_i2c.c.
Referenced by gps_i2c_init().
| bool_t gps_i2c_done |
Definition at line 34 of file gps_i2c.c.
Referenced by gps_i2c_init().
| uint8_t gps_i2c_rx_buf[GPS_I2C_BUF_SIZE] |
| uint8_t gps_i2c_rx_extract_idx |
Definition at line 31 of file gps_i2c.c.
Referenced by gps_i2c_init().
| uint8_t gps_i2c_rx_insert_idx |
Definition at line 31 of file gps_i2c.c.
Referenced by gps_i2c_init().
|
static |
Definition at line 51 of file gps_i2c.c.
Referenced by gps_i2c_init().
| uint8_t gps_i2c_tx_buf[GPS_I2C_BUF_SIZE] |
| uint8_t gps_i2c_tx_insert_idx |
Definition at line 33 of file gps_i2c.c.
Referenced by gps_i2c_init().
| struct i2c_transaction i2c_gps_trans |
 1.8.8
1.8.8