|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
GPS system based on datalink. More...
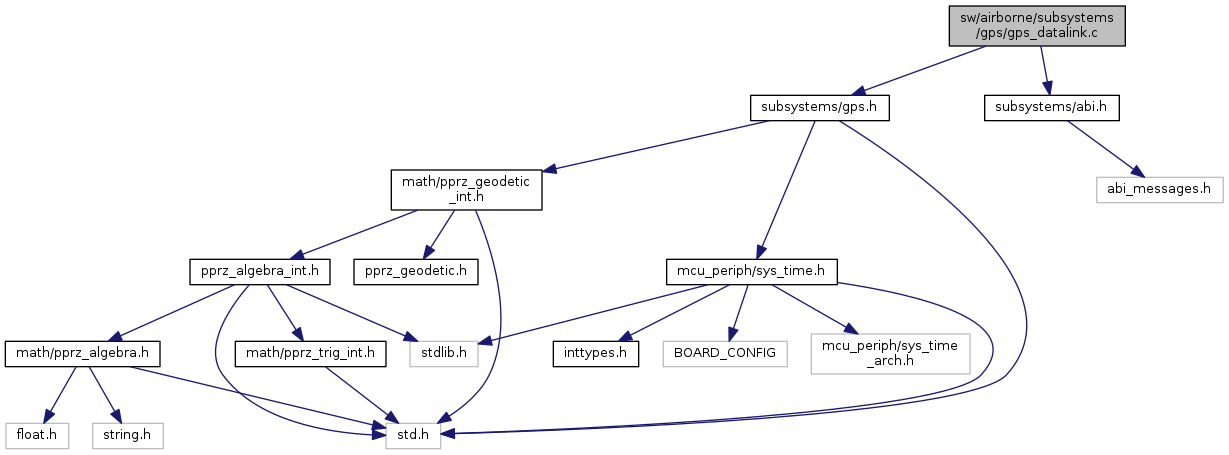
 Include dependency graph for gps_datalink.c:
Include dependency graph for gps_datalink.c:Go to the source code of this file.
Functions | |
| void | gps_impl_init (void) |
| GPS initialization. More... | |
| void | parse_gps_datalink (uint8_t numsv, int32_t ecef_x, int32_t ecef_y, int32_t ecef_z, int32_t lat, int32_t lon, int32_t alt, int32_t hmsl, int32_t ecef_xd, int32_t ecef_yd, int32_t ecef_zd, uint32_t tow, int32_t course) |
| Parse the REMOTE_GPS datalink packet. More... | |
Variables | |
| bool_t | gps_available |
| Is set to TRUE when a new REMOTE_GPS packet is received and parsed. More... | |
GPS system based on datalink.
This GPS parses the datalink REMOTE_GPS packet and sets the GPS structure to the values received.
Definition in file gps_datalink.c.
| void gps_impl_init | ( | void | ) |
GPS initialization.
GPS model specific init implementation.
Definition at line 62 of file gps_datalink.c.
Referenced by gps_init().
Here is the caller graph for this function:| void parse_gps_datalink | ( | uint8_t | numsv, |
| int32_t | ecef_x, | ||
| int32_t | ecef_y, | ||
| int32_t | ecef_z, | ||
| int32_t | lat, | ||
| int32_t | lon, | ||
| int32_t | alt, | ||
| int32_t | hmsl, | ||
| int32_t | ecef_xd, | ||
| int32_t | ecef_yd, | ||
| int32_t | ecef_zd, | ||
| uint32_t | tow, | ||
| int32_t | course | ||
| ) |
Parse the REMOTE_GPS datalink packet.
Definition at line 161 of file gps_datalink.c.
References LlaCoor_i::alt, UtmCoor_f::alt, UtmCoor_i::alt, GpsState::course, UtmCoor_f::east, UtmCoor_i::east, GpsState::ecef_pos, GpsState::ecef_vel, GpsState::fix, get_sys_time_usec(), gps, gps_available, GPS_DATALINK_ID, GPS_FIX_3D, GpsState::hmsl, GpsState::last_3dfix_ticks, GpsState::last_3dfix_time, GpsState::last_msg_ticks, GpsState::last_msg_time, LlaCoor_i::lat, LLA_FLOAT_OF_BFP, GpsState::lla_pos, LlaCoor_i::lon, nav_utm_zone0, sys_time::nb_sec, sys_time::nb_sec_rem, UtmCoor_f::north, UtmCoor_i::north, GpsState::num_sv, GpsState::tow, TRUE, utm_of_lla_f(), GpsState::utm_pos, EcefCoor_i::x, EcefCoor_i::y, EcefCoor_i::z, UtmCoor_f::zone, and UtmCoor_i::zone.
Referenced by dl_parse_msg().
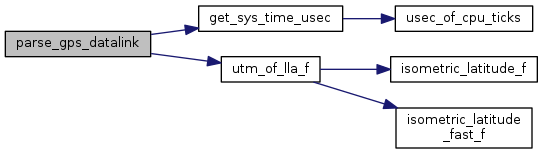
Here is the call graph for this function: Here is the caller graph for this function:| bool_t gps_available |
Is set to TRUE when a new REMOTE_GPS packet is received and parsed.
Definition at line 59 of file gps_datalink.c.
Referenced by gps_impl_init(), and parse_gps_datalink().
 1.8.8
1.8.8