|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Follow a certain AC ID. More...
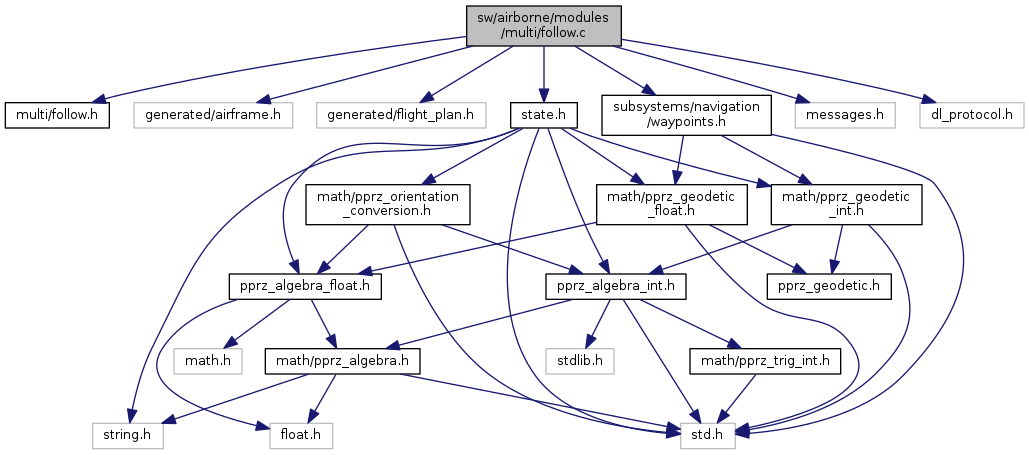
#include "multi/follow.h"#include "generated/airframe.h"#include "generated/flight_plan.h"#include "subsystems/navigation/waypoints.h"#include "state.h"#include "messages.h"#include "dl_protocol.h" Include dependency graph for follow.c:
Include dependency graph for follow.c:Go to the source code of this file.
Macros | |
| #define | FOLLOW_OFFSET_X 0.0 |
| #define | FOLLOW_OFFSET_Y 0.0 |
| #define | FOLLOW_OFFSET_Z 0.0 |
Functions | |
| void | follow_init (void) |
| void | follow_change_wp (unsigned char *buffer) |
| #define FOLLOW_OFFSET_X 0.0 |
Definition at line 39 of file follow.c.
Referenced by follow_change_wp().
| #define FOLLOW_OFFSET_Y 0.0 |
Definition at line 43 of file follow.c.
Referenced by follow_change_wp().
| #define FOLLOW_OFFSET_Z 0.0 |
Definition at line 47 of file follow.c.
Referenced by follow_change_wp().
| void follow_change_wp | ( | unsigned char * | buffer | ) |
Definition at line 55 of file follow.c.
References enu_of_ecef_point_i(), FOLLOW_OFFSET_X, FOLLOW_OFFSET_Y, FOLLOW_OFFSET_Z, INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, INT32_VECT3_SCALE_2, State::ned_origin_i, POS_BFP_OF_REAL, state, waypoint_set_enu_i(), EcefCoor_i::x, EnuCoor_i::x, EcefCoor_i::y, EnuCoor_i::y, EcefCoor_i::z, and EnuCoor_i::z.
Here is the call graph for this function: 1.8.8
1.8.8